Los aviones con el diseño de ala integrada en el fuselaje o BWB (por Blended Wing Body) están pegando fuerte otra vez. Como este concepto de Aurora, subsidiaria de Boeing, para DARPAque presentamos en noviembre de 2023.
El diseño, aún sin nombre «X» asignado, es parte del esfuerzo que está realizando últimamente Estados Unidos en el desarrollo de aviones experimentales (o X-Planes). Éste, fomentado por el Pentágono, busca aunar la velocidad de crucero de los aviones de ala fija, lo bueno de los diseños BWB (baja resistencia aerodinámica y gran capacidad de carga interior) con lo mejor de los aviones de despegue y aterrizaje vertical (VTOL), como poder despegar de cualquier sitio o volar a punto fijo Por eso para DARPA es SPRINT (Speed and Runway Independent Technologies — Tecnologías Independientes de Velocidad y Pista).
La última representación de la nave no tripulada, publicada el 20 de mayo, muestra un diseño BWB, ya conocido anteriormente, con una gran cola en forma de V y dos tomas de aire montadas baja a cada lado del morro. Más tres compuertas en el ala-fuselaje que carenan las hélices entubadas de sustentación, que permiten las operaciones VTOL —El Pentágono define aeronave STOL como aquella que puede aterrizar y despegar en 450m salvando los obstáculos estándar definidos por la norma (15.2m en la cabecera en despegue y 12.2 en aterrizaje)—, o SSTOL (despegues y aterrizajes super cortos, que necesitan más espacio que los anteriores, pero consumen menos combustible). El tren de aterrizaje, convencional, también permite los despegues y aterrizajes rodados, como en una aeronave normal, muy útiles en caso de tener pista de sobra, para poder despegar con más carga a igual consumo de combustible, o consumir mucho menos, a igualdad de carga.
Sin ofrecer detalles específicos, Aurora dice que el diseño «aprovecha soluciones de motor existentes», lo que, según la empresa, acortará el plazo de desarrollo y reducirá el riesgo de ingeniería.
DARPA ha fijado un objetivo de velocidad de 400-450kt (740-830 km/h).
Los nuevos detalles de diseño llegan menos de dos semanas después de que el diseño de Aurora fuera elegido por DARPA como la primera propuesta en avanzar a la última etapa de la competencia SPRINT, llamada Fase 1B, equivalente a decir que se les ha autorizado a proseguir hasta la fase de PDR (Preliminary Design Review o revisión preliminar de diseño)
Aurora dice que espera completar esta fase en 12 meses y tener un prototipo funcional listo para volar en 36 meses.
Las ventajas y desventajas de estos aviones las hemos discutido en muchas ocasiones. Claro, que las desventajas son básicamente para los diseños civiles que transportan personas: que posiblemente no cumplan los tiempos mínimos de evacuación por la distancia a las puertas, mareos en los alabeos, falta de ventanas para los que van en el centro… mientras que las ventajas son las de siempre: un volumen interno grande, genial relación sustentación/resistencia, bajo consumo.
Pero en este caso, tratándose de la DARPA, y la configuración que muestra la el artista en su visión conceptual, parece que poco tiene que ver con un avión de aerolínea. Vemos tres grandes compuertas para los fanes de sustentación, que le permitirían las operaciones VTOL. Y una gran zona central, sin ventanas, entre las tomas de los motores y los timones verticales. Boeing ya había presentado alguna patente para aviones de carga BWB, Jet Zero ha recibido hace poco el certificado de aeronavegabilidad para su BWB que plantean como avión cisterna y transporte militar, y sabemos que USA está pensando en los futuros aviones de transporte militar. Aurora dice que busca demostrar una «capacidad de cambio de paradigma para la movilidad aérea» con su aeronave SPRINT.
Ninguno de los otros competidores del programa (Bell, Piasecki Aircraft y Northrop Grumman), ha sido aprobado aún para la Fase 1B.
Cuando se hablan de aviones de combate, siempre los laureles son para los cazas. En ocasiones, para los bombarderos o aviones de ataque a tierra. Pero casi siempre la gente se olvida de los aviones de observación, o de los de transporte.
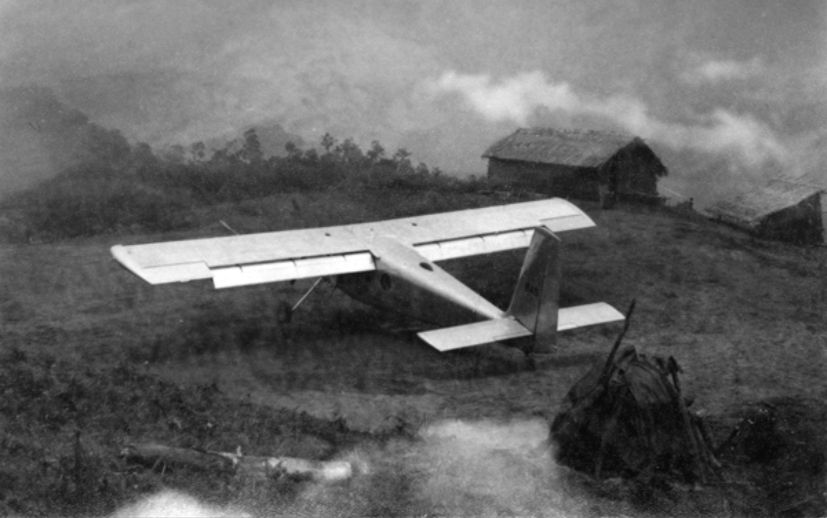
U-10 sobre vietnam
Por eso hoy queremos contar la historia del U-10 Courier en Vietnam.
No fue el arma de guerra más famosa de la Guerra de Vietnam, pero la aeronave utilitaria Helio U-10 Courier estaba entre las que volaba las misiones más secretas, que suele ser sinónimo de peligrosas.
El hombre que transformó el Helio Courier en una aeronave de combate era un oficial de operaciones encubiertas de la Agencia Central de Inteligencia (CIA).
Al piloto de la USAF Teniente Coronel Harry C. «Heinie» Aderholt no le gustaba el trabajo de escritorio en la sede de la CIA, en la calle 2430 E en Washington, D.C.
A Aderholt le encantaba volar. Estaba interesado por las operaciones COIN, guerra de contrainsurgencia. «Quería un avión que pudiera volar a campos de aviación construidos por los nativos», dijo Aderholt en una entrevista telefónica. «Eso significa una pista de aviación hecha con pico y pala». En 1958, escuchó hablar de una aeronave de despegue y aterrizaje corto (STOL) desarrollada por Otto Koppen y Lynn L. Bollinger, quienes formaron la Helio Aircraft Corp.
Aderholt organizó una prueba en el Aeropuerto Internacional Friendship, Md., hoy conocido como Aeropuerto Internacional de Baltimore-Washington Thurgood Marshall, y probó en vuelo la Helio de ala alta y tren de aterrizaje fijo.
«Inmediatamente supe», dijo Aderholt. «Esto era lo que la CIA necesitaba para extraer personas de territorios hostiles y apoyar a partisanos tras las líneas enemigas».
El Helio fue diseñado a finales de la década de 1940 por el Dr. Otto Koppen del Instituto Tecnológico de Massachusetts (MIT) y el Dr. Lynn Bollinger de la Universidad de Harvard. Su objetivo era crear una aeronave segura y de despegue y aterrizaje tan cortos que pudiera operar desde una cancha de tenis. El Helio sería apodado, eventualmente, «el avión de la pista de tenis».
La historia comienza del avión comienza gracias a la imaginación de un par de doctores en ingeniería, el Dr. Otto C. Koppen, profesor del MIT, y el Dr. Lynn Bollinger, profesor de Harvard. En los años previos a la Segunda Guerra Mundial, el Dr. Koppen había trabajado para Stout Metal Airplane y fue fundamental en el desarrollo del exitoso Ford Trimotor. Uniéndose al cuerpo docente del MIT a principios de la década de 1930 para enseñar estabilidad y control, se mantuvo activo desarrollando diseños únicos para el mercado comercial.
Después de la guerra, tanto Koppen como Bollinger comenzaron a reflexionar sobre los requisitos para una aeronave de despegue y aterrizaje cortos (STOL) que pudiera operar de manera segura desde pistas de aterrizaje no preparadas. En 1949, la pareja formó la Helio Corporation de Massachusetts y comenzaron a experimentar con alas de alta sustentación. El prototipo de lo que se convertiría en el Helio Courier fue una extensamente modificada Piper PA 17 Vagabond, llamada el Koppen-Bollinger Helioplano, o Helio One.
Los vuelos de prueba se llevaron a cabo en el Aeropuerto Metropolitano de Greater Boston (ahora Boston Logan) y pronto demostraron el éxito de la teoría de diseño básica.
Helio Plane
El 8 de abril de 1949, Koppen y Bollinger organizaron el primer vuelo de ensayos con el Helio 1 como nave de prueba de concepto para su sistema de hipersustentdores, con flaps fowler y slats.
Helio Plane, pueden verse bien los dispositivos hipersustentadores
Las alas del HelioCourier eran el «secreto» que le convertían en una aeronave STOL.
Ala de alto rendimiento con el mismo perfil aerodinámico que el famoso P-51 Mustang.
Slats tipo Handley-Page, que se despliegan automáticamente en función de la velocidad de vuelo, por lo que no requieren atención del piloto.
Timón horizontal totalmente móvil, en lugar de la combinación de estabilizador fijo más timón.
Flaps Fowler: Grandes flaps tipo «puerta de granero» que se desplegaban hacia atrás y luego hacia abajo, comprendiendo el 80% del borde de fuga del ala.
Debido a que los flaps ocupaban el 80% de la envergadura del ala y los alerones eran poco efectivos a baja velocidad, se añadieron spoilers, acoplados con los alerones, para un mejor control de alabeo.
Motor Lycoming de Seis Cilindros con reductora, que permitía al motor mover una hélice de mayor diámetro, lo que añadía mejoraba la capacidad de despegar en corto, y proporcionaba frenado dinámico en el aterrizaje.
Con el ala transplantada casi intacta del prototipo a la aeronave de producción, ésta última incorporaría unas superficies de cola, horizontal y vertical, de mayor tamaño, para un mejor control y estabilidad a bajas velocidades.
La potencia para los modelos iniciales era suministrada por un motor Lycoming de seis cilindros GO-480-G1D6 de 295 hp.
El tren de aterrizaje principal está montado bastante adelantado, para prevenir los capotajes en caso de frenadas fuertes. Menos visible en las fotos es el tren de aterrizaje para aterrizajes con viento cruzado, que permite que las ruedas puedan girar hasta 20 grados a la izquierda o derecha. ¡Combinado con la gran estabilizador vertical, estas características de diseño permiten aterrizar en menos de 500 pies (150m) con un viento cruzado de hasta 25 nudos!
En conjunto, todas estascaracterísticas de diseño permiten al Helio Courier despegar «a lo ancho» de algunas pistas de aterrizaje, como a menudo lo hacía en exhibiciones aéreas. Las operaciones desde pistas de 500 pies en la jungla y áreas remotas se consideraban rutinarias. La velocidad de pérdida sin potencia es de impresionantes 31 millas por hora (50km/h). Y con motor, y la gran hélice sopnado el ala, el Courier podía maniobrar cómodamente a 28 millas por hora.
La producción comenzó en Pittsburg, Kansas, en 1954 y continuó hasta 1974. Durante ese tiempo, más de 500 Helio Couriers, en una variedad de configuraciones especializadas, salieron por la puerta de la fábrica.
Los clientes iniciales incluyeron operadores de aviación misionera como el Servicio de Aviación y Radio de la Jungla (JAARS) que servían a poblaciones aisladas en todo el mundo. El Courier también encontró una audiencia entusiasta entre los bush pilots en Alaska, Canadá y en todo el mundo.
Muchos operadores pronto descubrieron que la maniobrabilidad de 30 mph del Helio Courier lo convertía en una alternativa menos costosa a los helicópteros. Incluso eso llevó a ser utilizado por operadores policiales, permitiendoles rastrear a los delincuentes con escáneres infrarrojos con un presupuesto reducido.
El Courier se convertiría en un transporte utilitario ligero. La versión original del Courier de la Fuerza Aérea de EE. UU. realizó su primer vuelo en 1958. La USAF compró tres aviones para evaluación ese mismo año, designándolos L-28As y posteriormente redesignándolos como U-10As.
Finalmente, se pedirían más de 100 U-10As adicionales, principalmente para ser utilizados por unidades de comandos aéreos en el Sudeste Asiático. Se usó para enlace, carga ligera, operaciones de pequeñas entregas de suministros, guerra psicológica (lanzamiento de panfletos y difusión de propaganda), controlador de aire avanzado (FAC) y misiones de reconocimiento.
Antes de Aderholt, el primer cliente del Helio Courier fue el Ejército de EE. UU. Compró un solo fuselaje (s/n52-2540), sería el único YL-24.
Como resultado de los esfuerzos de Aderholt, en la década de 1950 la USAF ordenó tres Helio H-395 Super Couriers (58-7026/7028) como aviones de enlace L-28A. Pilotos de prueba probaron los L-28A -y sus hopersustentadores– en la «granja» de la CIA en Camp Peary, Va. ¡E incluso en el el patio del Pentágono! O eso cuenta la leyenda. Oficiales militares y civiles, considerando operaciones en el Congo y contra Cuba, quedaron impresionados por la capacidad STOL del Courier. Pronto, un puñado de Couriers de la CIA pertenecientes a Air America llevaban a cabo misiones clandestinas en el interior de Laos.
Couriers en la Zona de Combate
A partir de 1962, los operativos de la CIA de Aderholt y Larry Ropka introdujeron el Courier en Laos, donde EE. UU. estaba aumentando su presencia militar. El biógrafo de Aderholt, Warren A. Trest, escribió que el Courier podía operar desde pistas rudimentarias donde el De Havilland L-20 Beaver (redesignado U-6 ) y el Westland Lysander ¡no podían!El Courier podía aterrizar y despegar en una aldea que no tuviera pista de aterrizaje ni camino de ningún tipo.
Pronto, un puñado de Couriers de la CIA, pertenecientes a Air America, estaban llevando a cabo misiones clandestinas en el interior de Laos.
El Super Courier U-10 fue utilizado por la USAF y la CIA para enlace, carga ligera, operaciones de pequeñas entregas de suministros, guerra psicológica (lanzamiento de panfletos y difusión de propaganda), control aéreo avanzado (FAC) y misiones de reconocimiento.
Al menos un Courier de la CIA estaba registrado como perteneciente a la Sociedad National Geographic, una organización muy real que no realiza labores de inteligencia.
La CIA no operaba alas, grupos o escuadrones. Una pequeña unidad de aviación con sede en la Costa Este de EE. UU. empleaba un número desconocido de Helios en operaciones en América Latina y contra Cuba. Air America los operaba en el Sudeste Asiático. Y, aparentemente, fueron utilizados en operaciones clandestinas en Europa del Este.
Era una aeronave fácil de manejar.
El ex Jefe de la Cuerpo de Técnicos del IV Ejército de EE. UU., Kenneth Lundeby, fue asignado al destacamento de las 7ª Fuerzas Especiales del Ejército en Fort Bragg, Carolina del Norte, y tuvo la tarea de recoger el primer U-10 Courier del Ejército (63-13166) en la fábrica en Pittsburg, Kansas, en 1963 o principios de 1964. «Era una aeronave fácil de manejar», dijo Lundeby en una entrevista telefónica.
Los Couriers del Ejército en Panamá inicialmente estaban en aluminio natural con números pintados en la aleta, pero sin otra insignia. El General Chester Johnson, comandante de la región, ordenó aplicar marcas estándar.
A partir de aproximadamente 1970, un puñado de los ex-Couriers de Fort Bragg aparecieron en Alemania Occidental con una unidad del Ejército. Durante la era de la Guerra Fría, hubo rumores de operaciones detrás del telón de acero.
La USAF
En 1962, la Fuerza Aérea ordenó Couriers adicionales, el año en que la designación L-28 fue cambiada a U-10. En julio de 1965, la Fuerza Aérea formó el 5º Escuadrón de Comandos Aéreos para volar el U-10B en Vietnam. El escuadrón era un componente del 14º Ala de Comandos Aéreos.
Los pilotos elegidos para el escuadrón se entrenaron en los U-10B Super Couriers en la Base Aérea de Forbes, Kansas, de agosto a octubre de 1965. La unidad de entrenamiento era la Destacamento 6 del 1er Ala de Comandos Aéreos. El Coronel retirado Harvey Taffett dijo en una entrevista telefónica que el 5º ACS «realizó su primera misión en Vietnam en mi cumpleaños, el 23 de noviembre de 1965, sobre el Valle de Ia Drang«, sitio de la clásica batalla, ese mes, entre los soldados de caballería aérea estadounidenses y las tropas regulares norvietnamitas. «Teníamos 30 pilotos volando 20 aviones, pero no era una vista bonita. La mayoría hizo un caballito con el avión al menos una vez.» En una acción temprana, Taffett utilizó la mera presencia del Super Courier desarmado para lograr una rendición. «Logré que 60 personas salieran de una cueva y se entregaran».
Después de Vietnam, los Super CouriersU-10A/B/D sirvieron en cuatro Escuadrones de Operaciones Especiales de la Guardia Nacional Aérea. Un escuadrón de Rhode Island operaba Super Couriers en flotadores.
La conexión de la Fuerza Aérea con un pariente mayor del Courier, el Helio H-550A Stallion (que voló por primera vez el 5 de junio de 1964) se limitó a financiar la aeronave. El servicio adquirió 15 Stallions bajo la designación militar AU-24 con puntos duros debajo del ala y fuselaje, para reconocimiento armado, apoyo aéreo cercano y control aéreo avanzado. Todos menos uno de estos aviones fueron transferidos a la fuerza aérea camboyana. Todos fueron eventualmente destruidos en combates en Camboya.
El ULTRA (Unmanned Long-Endurance Tactical Reconnaissance Aircraft — «Aeronave Táctica de Reconocimiento de Larga Duración No Tripulada») de la Fuerza Aérea de los Estados Unidos hizo una rara aparición en una ubicación no revelada en el Medio Oriente, que algunos usuarios de Twitter han identificado como la base aérea de Al Dhafra, en Emiratos Árabes Unidos. Que se sepa, esta sería la primera vez que se despliega.
Las fotos fueron publicadas en DVIDS (Defense Visual Information Distribution Service), de donde ya han sido eliminadas, después de que la ubicación no identificada fuera reconocida.
Para la vigilancia, tanto Rusia como Estados Unidos utilizan drones MALE/HALE (Medium Altitude/High Altitude Long Endurance) como el MQ-9 Predator, el MQ-4 Global Hawk. Pero en entornos disputados y con alta atrición, reemplazar las plataformas de varios millones de dólares se convierte en un asunto peliagudo, y muy caro. Además, su pérdida también representaría una relación coste-beneficio desfavorable, especialmente cuando son derribados por simples misiles antiaéreos que cuestan menos de un millón de dólares.
Los aviones no tripulados, que nacieron para ser soluciones económicas que no pusieran en peligro vidas humanas en misiones peligrosas, sucias (riesgos NBQ), o tediosas, han tenido éxito, pero ahora mismo son de todo menos económicos. Una historia paralela a la que se vivió con los cazas en el siglo XX, cada vez más caros y pesados, finalmente fue necesario convocar un concurso de cazas ligeros, que dio lugar al F-16. Y ahora se está intentando desarrollar plataformas de inteligencia, mucho más económicas, de desarrollo más rápido, y a ser posible basadas en plataformas ya industrializadas y producidas en serie.
El ULTRA está basado en un motovelero (TMG — Tourism Motor Glider) Stemme, aparentemente el S10, pero con hélice no retráctil.
Los motoveleros de Stemme han sido utilizados en varias conversiones a avión no tripulado de vigilancia, debido a sus estupendas prestaciones (gran diseño del ala, buena aerodinámica del fuselaje, resistencia aerodinámica reducida), como el Safran/Sagem Patroller francés o el Stemme ASP S15 alemán.
El modelo estadounidense se desarrolló en menos de diez meses. Los requisitos, además de la gran autonomía (llega a las 80h), era partir de una plataforma simple, ya industrializada, y cuya producción se pudiera escalar fácilmente a bajo coste. La masa de los pilotos es reemplazada por la de la aviónica de navegación y control y por los sensores y sistemas ópticos.
La integración de sensores Electro-Ópticos/Infrarrojos (EO-IR) y de Radiofrecuencia (RF) de bajo costo es posible debido a las altitudes de operación más bajas que, por lo que no requieren ópticas grandes o RF de alta potencia. Y la integración es sencilla, gracias a la espaciosa cabina diseñada para dos pilotos, dando lugar así a un drone de inteligencia, vigilancia y reconocimiento (ISR) que permanece en el aire durante días. Aunque puede ser derribado, el misil de defensa aérea también revela su posición y esta información puede ser transmitida. Pero su pérdida y su reposición no será tan costosa como en otras plataformas de desarrollo dedicado específico.
Este concepto, por cierto, lo venimos defendiendo hace muchos años en el blog, y hace menos en el podcast: ahorrar costes en el desarrollo de una plataforma dedicada y específica y emplear una célula comercial, probada, y producida en serie, ya industrializada, e invertir en llenarla con sistemas, y producir el avión en masa, para poder probarlo en servicio y poder desarrollar doctrinas para su uso y modificarlo rápidamente con las lecciones aprendidas, precisamente con ese presupuesto que se ha ahorrado utilizando células ya probadas e industrializadas.
Hay quien piensa que estos requisitos han sido validados por la guerra en Ucrania y el punto conflictivo emergente en el Asia-Pacífico, donde China está aprendiendo lecciones de los éxitos y fracasos de Moscú y Kiev. Rusia y Ucrania han estado utilizando drones simples, y disponibles comercialmente, para todo, desde el reconocimiento táctico básico en el campo de batalla y la corrección del fuego de artillería, hasta su conversión en munición merodeadora. Y no solo con drones de pequeño tamaño, ¡también con aviones ultraligeros!
Asumiendo que no nos equivocamos al identificar la célula como perteneciente a un StemmeS10, y que sus características no hab variado gran cosa al ser modificado, el tamaño y las características serían:
Longitud: 8.42 m (27 ft 7 in)
Envergadura: 23.00 m (75 ft 6 in) (excluding winglets)
Altura: 1.80 m (5 ft 11 in)
Superficie Alar: 18.70 m2 (201 sq ft)
Alargamiento alar: 28.3
Peso en vacío: 645 kg (1,422 lb)
Peso al despegue: 850 kg (1,874 lb)
Motor: 1 × Rotax 914 F2/S1 115cv
Velocidad de crucero: 259 km/h (161 mph, 140 kn)
Velocidad de pérdida: 78 km/h (48 mph, 42 kn)
VNE: 270 km/h (168 mph, 146 kn)
Alcance: 1,730 km (1,075 mi, 934 nmi)
Techo de servicio: 9,140 m (30,000 ft)
Límites: +5.3/-2.65 Gs
Máximo planeo: 50:1
US Air Force Unmanned Long-Endurance Tactical Reconnaissance Aircraft crew chiefs prep an ULTRA for taxi before takeoff at an undisclosed location within Central Command area of responsibility on May 7. ULTRA is an unmanned aerial system capable of flight times up to 80 hours. pic.twitter.com/qz9U6taBqM
The 'undisclosed location' is Al Dhafra Air Base in the UAE. The ULTRA drone can be seen in one of the photos occupying hangar 5 which was used to house global hawks in the past. https://t.co/MrAs3qvnO2pic.twitter.com/BOgORmaXUc
Aurora Flight Sciences continuará diseñando el Liberty Lifter para el ejército de EE. UU., que ha descartado oficialmente la propuesta de General Atomics.
El Pentágono anunció el jueves 9 de mayo que Aurora, una subsidiaria de Boeing con sede en Virginia ha recibido una ampliación del contrato por valor de 8.3 millones de dólares.
Una de las imágenes que dejó ver Aurora de su concepto
Boeing Pelikan
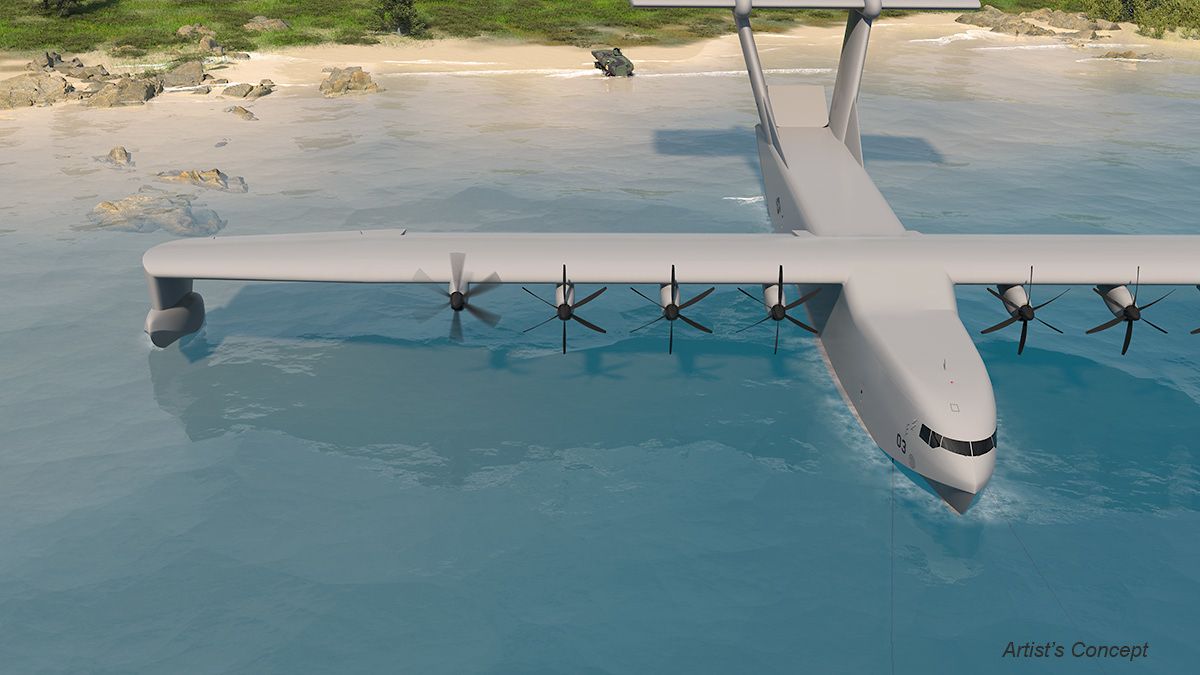
La propuesta de Aurora, sobre estas líneas, tenía una configuración bastante normal, con un fuselaje y ala alta, y flotadores de punta de plano para estabilizar el avión en el agua. Y comentábamos que bebía de la experiencia de Boeing en el desarrollo de su Pelikan, pues el proyecto cuenta con la participación de ingenieros que trabajaron en este vehículo, de la casa matriz de Aurora, Boeing.
El concepto de General Atomics era de doble casco, para mayor estabilidad en el agua, con propulsión distribuida utilizando doce turbohélices, similar al diseño conceptual que publicó DARPA en su nota de prensa original.
Hace casi exactamente dos años, el 19 de mayo de 2022, conocíamos por primera vez el programa Liberty Lifter de DARPA, para desarrollar un vehículo de efecto suelo (WIG – Wing in Ground Vehicle) o ekranoplano. Un año después conocimos que habían sido seleccionados Aurora y General Atomics para continuar con el desarrollo de sus propuestas.
Inicialmente, DARPA imaginó que Liberty Lifter tendría aproximadamente el mismo tamaño y capacidad que un C-17 Globemaster, pero desde entonces ha reducido el tamaño del demostrador hasta el de un C-130 Hércules. Sin embargo, los documentos presupuestarios de DARPA para el año fiscal 2025 muestran que un futuro Liberty Lifter más grande podría construirse escalando el tamaño del demostrador tecnológico hasta el de un C-17.
Como hemos comentado en el podcast con nuestro amigo Carlos en más de una ocasión, creemos que el teatro de operaciones estadounidense del futuro va a ser marítimo, concretamente en la zona de Taiwan, así que necesita vehículos que pueda desplazarse a gran velocidad hasta la isla. Y esta aeronave, pensada para no volar más que rascando el agua, podría ser una buena solución: gran capacidad de carga a alta velocidad. Y además, DARPA solicitaba que fuera con materiales no habituales en aeronáutica, así que imaginamos que se estará pensando en acero inoxidable, más resistente a ambientes marítimos que el aluminio.
El programa centra el foco en tres aspectos:
Operaciones marítimas ampliadas: Se hará hincapié en el funcionamiento en estados de mar turbulentos mediante la creación de capacidades STOL para reducir la carga de impacto de las olas durante el despegue/aterrizaje y nuevas soluciones de diseño para absorber las fuerzas de las olas. Además, el proyecto abordará los riesgos de colisión del vehículo durante el funcionamiento a alta velocidad en entornos congestionados. Por último, el objetivo es que el vehículo funcione en el mar durante semanas, sin actividades de mantenimiento en tierra.
Fácil industrialización a gran escala y bajo coste: La construcción dará prioridad a los diseños sencillos y baratos de fabricar frente a los conceptos complejos y de bajo peso. Los materiales deben ser más asequibles que los de la fabricación tradicional de aviones y estar disponibles para ser comprados en grandes cantidades.
Controles complejos de vuelo y en el mar: Se desarrollarán sensores y esquemas de control avanzados para evitar las grandes olas y gestionar las interacciones aerodinámicas e hidrodinámicas durante el despegue y el aterrizaje.
Los objetivos incluyen el despegue y el aterrizaje en el estado del mar 4, la operación sostenida en el agua hasta el estado del mar 5 y operar como ekranoplano o vehículo de efecto suelo y como avión, con un techo de 10000ft sobre el mar (ASL).
Mayman Aerospace se hizo conocida hace unos años por su concetpo de «moto» voladora. Una aeronave para la famosa nueva movilidad aérea o movilidad aérea urbana sin cabina, y cuya posición de pilotaje recuerda mucho a la de las motos, de ahí lo de «moto voladora».
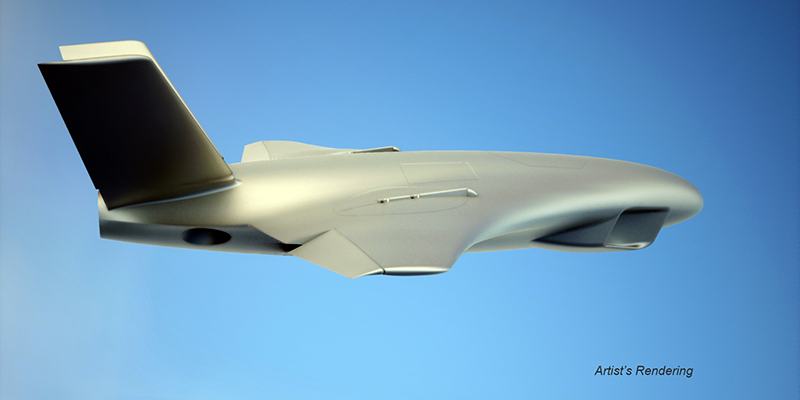
Contaba con ocho motores a reacción, montados en cuatro pods orientables y unas pequeñas alas embrionarias. Y, a partir de este concepto, bastante poco eficiente si de consumo de combustible hablamos y con un mercado muy reducido, han desarrollado otro que posiblemente tenga mucho más futuro: el de un avión no tripulado de despegue vertical multifunción, llamado RazorP100.
La moto voladora de Mayman, también llamada Razor
Lo han presentado en forma de avión no tripulado de despegue y aterrizaje vertical, de alta velocidad subsónica. Vamos, un VTOL que vuela a 800km/h.
Razor P100 de carga
El diseño es modular, con un fuselaje tipo cuerpo sustentador, o eso parece, y unas pequeñas alas en flecha. En el fuselaje se soportan cuatro cunas basculantes para otros tantos turborreactores, lo que permite la operación VTOL a este drone.
Razor P100 entregando bienes de primera necesidad médica en un entorno disputado
Parece que su diseño modular lo hace fácilmente adaptable a diversos tipos de misiones, desde la de carga, incluso de material tan sensible como el médico, a reconocimiento, blanco aéreo de prácticas, munición merodeadora, o UCAV (vehículo aéreo no tripulado de comabate). También parece que puede actuar en enjambre, de forma colaborativa, trabajando en equipo con otros Razor que pueden realizar funciones de ISR, o designación de blancos.
Dos P100 distintos trabajando de forma colaborativa, dentro de un enjambre de hasta 1000 drones
Según la compañía, la carga que puede transportar varía de 45 a 450kg, tanto interna como externamente, en función de la versión. Y podría operar en un pequeño cuadrado de 3×3 metros. Además, por seguridad, va equipado con un paracaídas de recuperación balístico.
Razor P100 como blanco aéreo
El sistema de navegación y control Skyfield, desarrollado íntegramente por la compañía, cuenta con inteligencia artificial, lo que le ayuda a esquivar obstáculos o proseguir con su misión en situaciones de denegación de GPS, ¡y dicen que puede manejar enjambres de hasta 1000 drones!
Una de las grandes ventajas del diseño es que funciona con un motor que se puede alimentar con cualquier combustible pesado, esto es desde queroseno a diésel de los camiones, lo que simplifica mucho la logística de combustible a la hora de transportarlo.





_(34081142555).jpg)