Como os prometimos, en julio y en agosto traeríamos un solo episodio por mes, así a vosotros os da tiempo de poneros al día con los episodios atrasados, y a nuestro equipo a cogerse unas merecidas vacaciones.
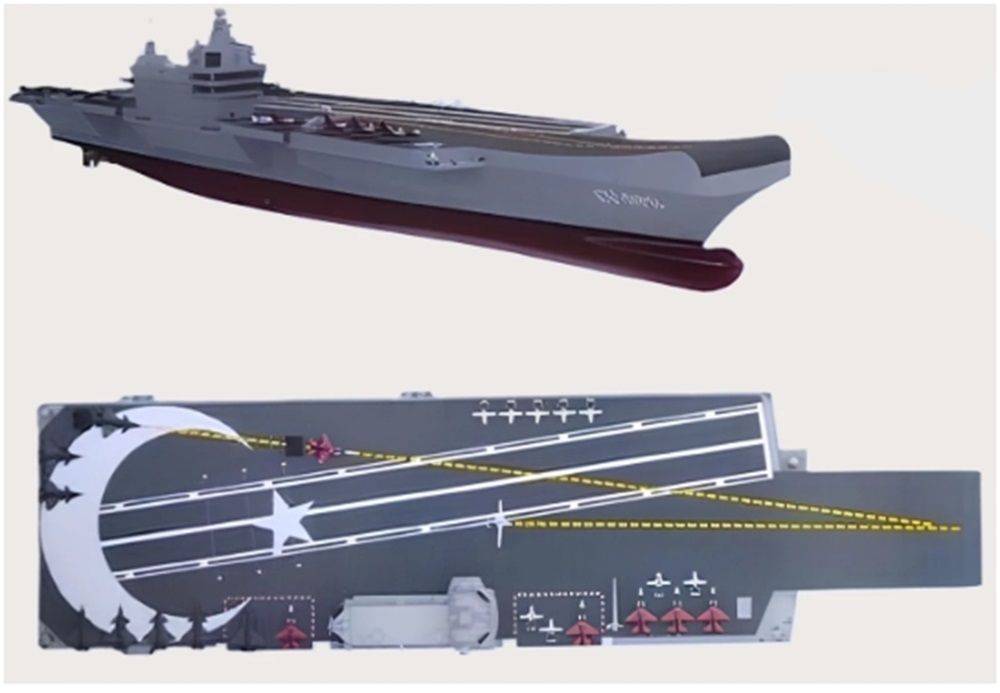
Hoy nos hemos juntado Carlos y yo para realizar un análisis de la actualidad con las últimas noticias de defensa, a saber: el anuncio del estudio del portaaviones convencional para España, del anuncio del portaaviones para Turquía, la cancelación de tres proyectos estadounidenses como son el del Wedgetail, el cisterna stealth y el ekranoplano Liberty Lifter, la aparición de imágenes del ekranoplano equivalente chino, bautizado como el Monstruo de Bohai, y las intenciones de Francia de abandonar el Eurodrone y la noticia de que quiere controlar el 80% del NGF. ¿Nos acompañáis?
El podcast se puede encontrar en Amazon Music, Apple Podcast, Google Podcast, Ivoox, Spotify. ¡Ah! y como Google Podcast desaparece, lo podéis encontrar ya en Youtube / Youtube Music.
P.D.: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utilizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast