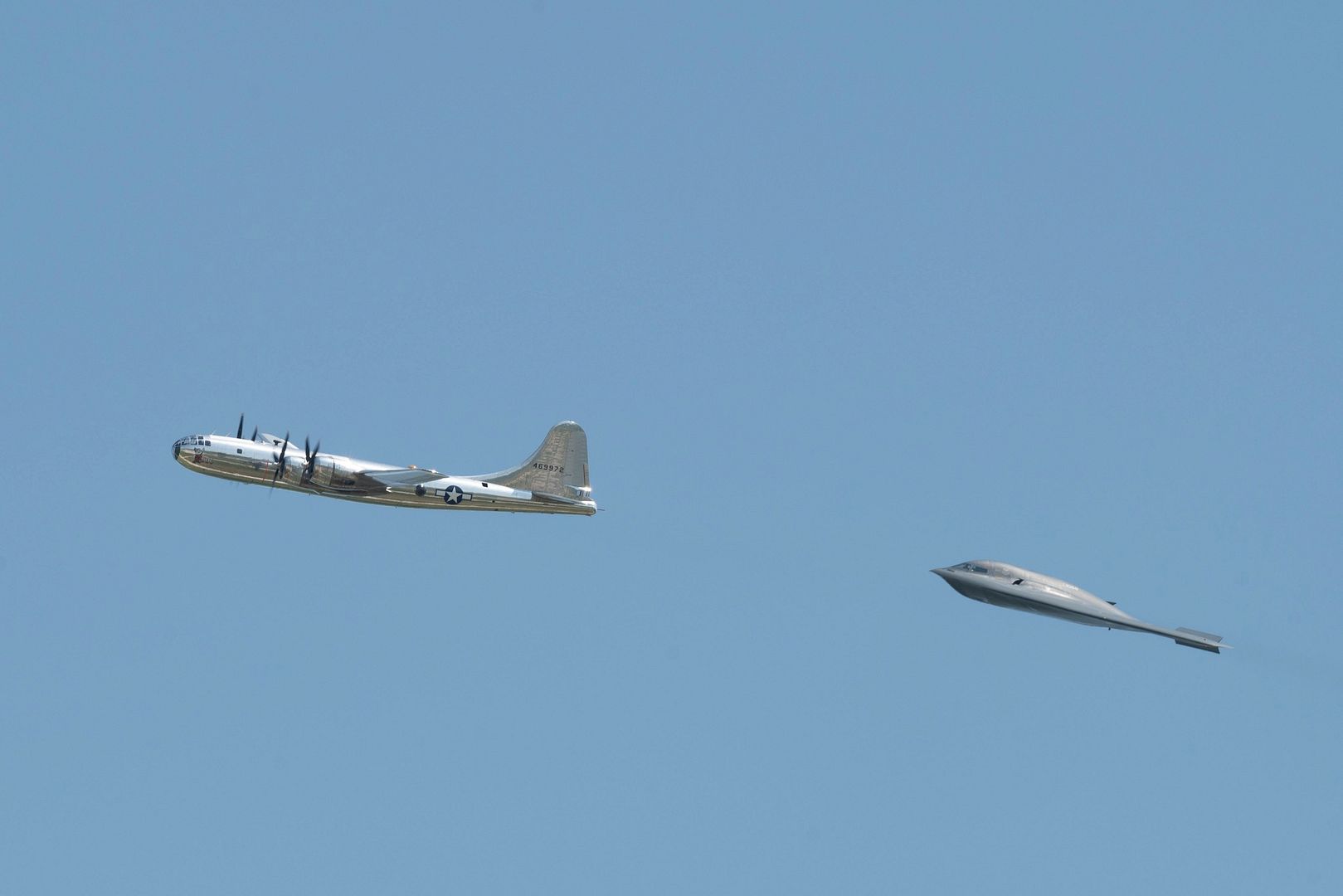
En la base aérea de Whiteman se ha celebrado recientemente (13 y 14 de julio) Wings over Whiteman 2024. Y nos ha dejado una estampa no esperada, y que posiblemente es la 1ª vez que se produce. Un B-29 y un B-2 volando en formación.
Como curiosidad histórica, el B-29 fue el primer bombardero de la USAAF (luego USAF) con capacidad de portar bombas atómicas. El B-2 es el último bombardero que ha entrado en servicio con esa capacidad.
Algunos usuarios de Twitter han ido publicando ya algunos vídeos.
On Sunday, my son and I were able to watch a B-2 and B-29 fly together. Was a sight to see! pic.twitter.com/7q9JtaY1D5
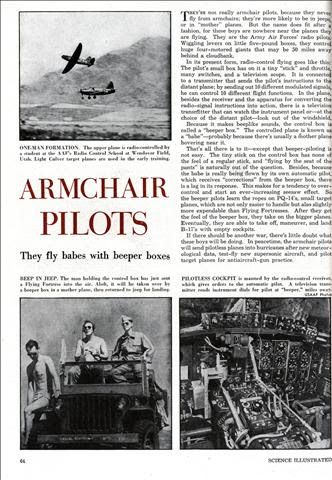
Así es como hoy día muchos llaman de forma un tanto despectiva a los controladores de los UAVs. Pero éste no es un titular de hoy en día, sino ¡de 1947!
El artículo apareció en el número de febrero de 1947 de Modern Mechanix:
PILOTOS DE SILLÓN (Modern Mechanix, febrero de 1947)
Vuelan aviones con cajas que emiten pitidos. No son realmente pilotos de sillón, porque nunca vuelan desde sillones; es más probable que estén en jeeps o en aviones nodriza. Pero el nombre encaja, de alguna manera, porque estos muchachos nunca están cerca de los aviones que están volando. Son los pilotos por radio de las Fuerzas Aéreas del Ejército (USAAF(1)). Moviendo palancas en pequeñas cajas de cinco libras, controlan enormes, gigantes cuatrimotores que pueden estar a 50 millas de distancia detrás de un banco de nubes.
En su forma actual, el vuelo por radiocontrol es así: la pequeña caja del piloto tiene una pequeña «palanca» y un acelerador, muchos interruptores y un visor de televisión. Está conectado a un transmisor que envía las instrucciones del piloto al avión controlado de forma remota; enviando 10 señales moduladas diferentes, puede controlar 10 funciones de vuelo diferentes. En el avión, además del receptor y el aparato para convertir las instrucciones de la señal de radio en acción, hay un transmisor de televisión que puede mostrar el panel de instrumentos o, a elección del piloto remoto, mirar a través del parabrisas.
Debido a que emite sonidos parecidos a pitidos, la caja de control se llama “caja de pitidos”. El avión controlado se conoce como «bebé», probablemente porque generalmente hay un avión nodriza flotando cerca de él.
Eso es todo, excepto que el pilotaje remoto no es fácil. En el pequeño mando en la caja de control no se tiene la sensación que da un joystick normal, y «volar por las sensaciones en el culo» está naturalmente fuera de la ecuación. Además, debido a que el bebé realmente está siendo pilotado por su propio piloto automático, que recibe las «correcciones» de la caja de pitidos, hay un retraso en su respuesta (2). Esto genera una tendencia al sotre-control que hace que comience un movimiento de sube y baja cada vez mayor(3). Así que los pilotos remotos aprenden primero a manejarse en los PQ-14, pequeños aviones-blancos aéreo, que no solo son más fáciles de manejar sino también un poco más prescindibles que los B-17 Flying Fortresses. Después de familiarizarse con la caja de pitidos, toman el control de los aviones más grandes. Eventualmente, son capaces de despegar, maniobrar y aterrizar B-17 no tripulados.
Si hubiera otra guerra, no hay duda de lo que estos muchachos estarán haciendo. En tiempos de paz, los pilotos de salón enviarán aviones sin piloto a los huracanes para obtener nuevos datos meteorológicos, probarán nuevos aviones supersónicos y pilotarán aviones blanco para practicar con armas antiaéreas.
Notas
(1) Aeronautical Division, Signal Corps (1 agosto 1907 – 18 julio 1914); Aviation Section, Signal Corps (18 julio 1914 – 20 mayo 1918); Division of Military Aeronautics (20 mayo 1918 – 24 mayo 1918); U.S. Army Air Service (24 mayo 1918 – 2 julio 1926); U.S. Army Air Corps (2 julio 1926 – 20 junio 1941); U.S. Army Air Forces (20 junio 1941 – 18 septiembre 1947)
(2) Es un problema bien conocido, y cuanto más lejos está el avión controlado de forma remota, más retraso en recibir las órdenes, y con más antelación hay que preveer las acciones del avión.
El Martin JRM Mars, uno de los cinco construidos, bautizado como Philippine Mars, que estuvo en servicio como avión antiincendios con Coulson Aviation, aterrizará en el Museo del Aire y del Espacio de Pima en Tucson, Arizona. El otro Mars que quedaba encontró hace poco su jubilación, tras ser retirado del servicio, en un museo de la Columbia Británica.
Este ha sido un mes emocionante para ambos hidroaviones Martin Mars. Como un tributo adecuado a sus años de servicio y al arduo trabajo de muchas personas en Columbia Británica y en los Estados Unidos, nos complace ver a ambos aviones Mars aterrizando para descansar en instituciones de clase mundial en 2024
Wayne Coulson, CEO de Coulson Group
Coulson adquirió dos de los aviones, el Hawaii Mars y el Philippine Mars, en 2007, marcando el inicio de las operaciones de aviones cisterna de ala fija de la compañía para el apoyo aéreo en incendios forestales.
El Hawaii Mars y el Philippine Mars son los únicos aviones Martin JRM Mars que quedan hoy en día.
Nos complace tener a la Philippine Mars en nuestro museo, donde preservaremos este avión de la era de la Segunda Guerra Mundial durante décadas
Scott Marchand, CEO del Museo del Aire y del Espacio de Pima
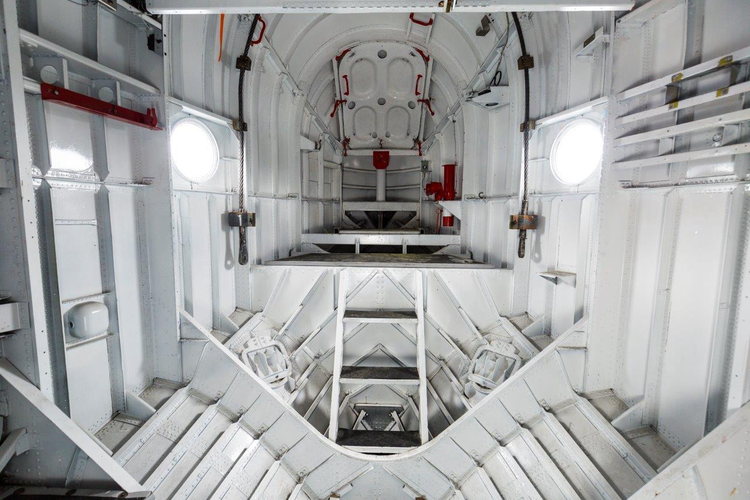
Y como la historia completa del avión os la contamos hace poco, desde como nació, el servicio que prestó en la guerra y cómo acabó de avión antiincendios, no la vamos a repetir. Pero os dejamos una visita fotográfica al interior la aeronave aquí debajo.
Cabina de los pilotosPosición del ingeniero de vueloInterior, zona posterior del fuselaje
Los hombres de Tuskegee. Los diablos de cola roja, parece que les llamaban los alemanes cuando les veían aparecer en el cielo. Una de las unidades más afamadas de la Segunda Guerra Mundial: dice la leyenda que en los vuelos que ellos escoltaron no se perdió ningún solo bombardero. No fueron bien recibidos, eran de raza negra en un Estados Unidos totalmente segregado. Ni siquiera su éxito durante la Segunda Guerra Mundial se lo puso fácil, y aunrecientemente se siguen solventando algunas de las injusticias cometidas con ellos, como declararles en los años 90 ganadores de una competición de tiro celebrada en 1949.
A sus 100 años de edad, el teniente coronel James H. Harvey III, una leyenda de la aviación de la Segunda Guerra Mundial y de Corea, y uno de los primeros pilotos de combate afroamericanos, recibió un ascenso honorífico al rango de coronel.
La promoción honorífica tuvo lugar el 4 de noviembre de 2023 en Empower Field de Denver durante el medio tiempo del partido entre los Falcons de la Academia de la Fuerza Aérea de los Estados Unidos y los Black Knights de la Academia Militar de los Estados Unidos.
Competición de Tiro
En 1949, en la primera competencia de tiro en la Base de la Fuerza Aérea de Las Vegas (en ese entonces), grupos de cazas de todo el país llegaron para participar.
Y el entonces teniente Harvey y sus compañeros del 332º Grupo de Cazas fueron uno de los competidores. Su actuación fue magnífica en todas las pruebas de la competición, y fueron los ganadores generales.
Durante décadas, sin embargo, el récord estuvo inexplicablemente desaparecido y los registros oficiales de la USAF listaban al ganador como desconocido. En 1993, la Fuerza Aérea corrigió el registro cuando el coronel retirado Harry Stewart, del equipo de 1949, regresó a la ahora Base de la Fuerza Aérea de Nellis, en Nevada, con pruebas de la victoria del 332º Grupo de Cazas.
Para honrar a Harvey y a todos los Tuskegee Airmen, volaron sobre ellos dos aviones que encarnan su legado. El P-47 Thunderbolt, el avión volado por los Tuskegee Airmen del 332º Ala de Cazas para ganar la primera competición Guillermo Tell en 1949, y el P-51 Mustang, avión icónico de los Tuskegee Airmen durante la Segunda Guerra Mundial.
Hemos hablado de numerosas versiones raras de aviones. Pero esta yo creo que se lleva la palma. Aunque lo más extraño no sea el avión en sí, que no tiene ninguna forma peculiar, ni fuselaje doble, ni materiales exóticos… sino el uso para el que fue diseñado: Estos King Cobra fueron concebidos para que las tripulaciones de bombarderos hicieran blanco sobre ellos, disparándoles con munición de plástico. ¿Vosotros tendríais la sangre fría de permitir que cientos de artilleros os dispararan DE VERDAD, sólo para practicar su puntería? Los cazas, además de una tonelada de blindaje extra, llevaban en el cono de la hélice una luz que se encendía si el artillero había hecho blanco.
El avión, utilizado como blanco aéreo ¡con piloto real dentro!, generalmente se pintó de color naranja brillante para aumentar su visibilidad, aunque hay otros esquemas de pintura acebrados.
Se eliminó todo el armamento y el blingaje estándar, y se sustituyeron por una tonelada de blindaje adicional, que incorporaba sensores para detectar los impactos, que eran señalados con una luz en el cono de la hélice, por donde normalmente asomaba el cañón de 37mm. Esto le valió al avión el apodo no oficial de Pinball, nombre que terminó pintado en el morro de las primeras unidades modificadas. Esta variante recibió el nombre de RP-63.
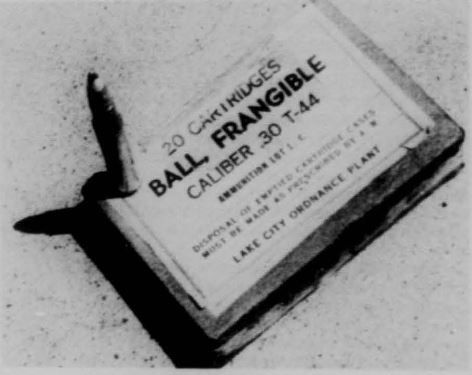
Como las aeronaves iban tripuladas, se desarrolló munición frangible, hecha de baquelita y plomo, que debía desintegrarse al impactar contra el avión. Estos se conocían como «Cartucho, calibre .30, frangible, bola, M22».
La mejor manera de entrenar a un piloto es hacer que vuele un avión real hasta que sea competente, ¿verdad? Entonces, ¿por qué no entrenar a los artilleros aéreos permitiéndoles disparar a aviones reales? Y, de hecho, esto se haría posteriormente con aviones excedentes de la Segunda Guerra Mundial, como el Hellcat, convertidos en aviones a control remoto y pintados con el mismo color naranja. ¡Pero eso, a control remoto, no tripulados!. Esto hace que este programa sea uno de los más inusuales de las Fuerzas Aéreas del Ejército de EE. UU. (USAAF) en la Segunda Guerra Mundial.
El entrenamiento organizado de artilleros aéreos no comenzó hasta junio de 1941, cuando se estableció la primera escuela de artillería en Las Vagas, Nevada. Tradicionalmente, en todas las escuelas, el entrenamiento inicial del artillero se llevó a cabo utilizando dispositivos improvisados como escopetas montadas en la parte posterior de plataformas móviles, o entrenadores más sofisticados como los entrenadores Jam Handy y Waller. Algunos de los mejores y más realistas entrenamientos se realizaron usando cámaras ametralladora, pero había que esperar a revelar el carrete para evaluar al artillero.
Al mayor Cameron Fairchild se le atribuye la idea de desarrollar una bala no letal que podría dispararse en combates simulados pero sin derribar a los aviones blanco. Inicialmente, la idea era hacer las balas de vidrio, que se romperían y astillarían al golpear algo sólido. Para investigar formas de hacer una bala frangible, Fairchild contó con la ayuda de dos profesores de la Universidad de Duke, Paul Gross y Marcus Hobbs.
En el otoño de 1942, Fairchild presentó su munición al Comité de Investigación de la Defensa Nacional (NDRC, por sus siglas en inglés), donde la propuesta se topó directamente con una pared de ladrillos: el Departamento de Artillería del Ejército, responsable del desarrollo de todas las armas y municiones, que argumentaba que cualquier bala que fuera verdaderamente frágil no tendría las mismas características balísticas que la munición real. También les preocupaban los daños que pudieran recibir el avión blanco y su piloto si no se desarrollaba un blindaje adecuado. Finalmente la NDRC permitió que la investigación continuara pero con financiación y urgencia limitadas.
Con el apoyo de Bakelite Corporation y la Universidad de Duke, los profesores Gross y Hobbs desarrollaron una bala calibre .30 hecha de plomo y baquelita que podía dispararse con una ametralladora ligeramente modificada. En los ensayos, dispararon contra paneles de blindaje de aluminio y, a distancias tan cortas como 9m, no los dañaban. A principios de 1944, la munición frangible estaba lista para la producción con la designación T-44.
Con el problema de las municiones y las armas resuelto, el enfoque ahora se centró en encontrar un avión objetivo adecuado. Las pruebas iniciales se realizaron contra un Douglas A-20 blindado con planchas de aluminio. Sin embargo, un caza monomotor, preferiblemente con un motor refrigerado por líquido, se parecería más y simularía mejor los cazas alemanes, como el Messerschmitt 109. Y el el único caza estadounidense moderno de alto rendimiento que no tenía demanda para uso en combate por parte de las fuerzas estadounidenses era el P-63 Kingcobra de Bell, la mayoría de los cuales se proporcionaban a la Unión Soviética en virtud de la Ley de Préstamo y Arriendo.
En agosto de 1944, Bell modificó cinco aviones P-63A, quitó todo el armamento, reemplazó gran parte de los paneles de aluminio delanteros con paneles blindados más gruesos e instaló vidrio blindado en el parabrisas y las ventanas laterales. Además, se instalaron más de 100 micrófonos detrás de los paneles blindados y se conectaron con un contador de impactos en la cabina, además de con la luz roja de la que hemos hablado antes, situada en el cono de la hélice, por donde solía disparar el cañón Oldsmobile de 37mm.
Designados oficialmente como RP-63A, los cinco prototipos rápidamente se conocieron como «Pinballs» y a alguno se le pintó ese nombre en el morro. Después de resolver algunos problemas carga y centrado, y por tanto de estabilidad, se ecnargaron otros 95 RP-63A, seguidos de 200 RP-63C a principios de 1945, totalizando 300 blancos aéreos tripulados.
Luz en el cono de hélice
Con las primeras entregas de munición frangible producida en masa y aviones Pinball disponibles, finalmente se puso en marcha el entrenamiento a principios de 1945, y la USAAF realizó una demostración pública en marzo de ese año. En abril de 1945, el entrenamiento del programa Pinball estaba en marcha en las siete escuelas de artillería.
Contador de impactos en cabina
Durante el entrenamiento surgieron varios problemas, algunos ya predichos, como la diferente balística de los proyectiles. Por eso las miras de las armas tuvieron que ser recalibradas para la menor velocidad de boca y diferente trayectoria de las balas frangibles. Además las balas de plomo y baquelita hacían que el arma se encasquillara más de lo normal. Aunque la peor parte se la llevaban los pilotos. Pese al blindaje, cuando una bala de plástico hacía blanco en los radiadores, sólo quedaba saltar o aterrizar con el motor parado. Aunque el susto más grande se lo llevó un piloto que volvió con su parabrisas blindado de 38mm de espesor roto por una bala, ¡se había colado una bala real en la cinta de munición de entrenamiento!
Para proteger mejor al avión objetivo y al piloto, la última versión del Pinball, el RP-63G tenía un blindaje extendido para proteger las entradas de refrigeración del motor. Además, se agregaron más luces en el fuselaje y las alas para mejor indicación de cuando los artilleros hacían blanco. Solo se habían entregado 32 de estos Pinballs mejorados cuando se canceló la producción, tras la rendición de Japón.
Los aviones del programa Pinballs y balas frangibles se transfirió del Comando de Entrenamiento de la USAAF al nuevo Comando Aéreo Estratégico, donde continuaron ayudando a entrenar a los artilleros B-29. Sin embargo, en 1948, incluso SAC había abandonado el programa. Los aviones Pinball supervivientes fueron redesignados como QF-63, esto es, blancos aéreos no tripulados.