El gobierno de los EE. UU., a través de la Oficina de Responsabilidad Gubernamental (GAO), ha publicado un informe preocupante que revela que la disponibilidad del caza furtivo ha caído a mínimos preocupantes.
El objetivo del programa es desarrollar una plataforma remolcada semiautónoma que mejore la supervivencia de buques logísticos no armados frente a amenazas potenciales, principalmente vehículos no tripulados.
El Kaman K-16B es una aeronave experimental V/STOL que fue construida por Kaman Aircraft para la US Navy en 1959 con el fin de evaluar un concepto novedoso de aeronave de ala basculante, de despegue vertical, con palas de rotor con geometría variable ¡que incluían un flap en el borde de salida de cada pala!
Convertido a partir de un Grumman Goose, el K-16B fue sometido a extensas pruebas en túnel de viento, pero no voló antes de que el proyecto fuera cancelado en 1962.
Los dirigibles no rígidos fueron un componente importante de la aviación naval de los Estados Unidos durante la Segunda Guerra Mundial y hasta la década de 1950. La mayor “clase” de dirigibles de patrulla marítima, hasta la Segunda Guerra Mundial, era la serie K.
El K-1 fue un dirigible experimental construido por la Fábrica de Aeronaves Navales en Filadelfia en 1931. Entre las características que introdujo estaba una “góndola” o “carro” unido directamente al envoltorio. El K-1 tenía dos motores, y su «globo» tenía una capacidad de 319,900 pies cúbicos (9058,6 metros cúbicos) y una velocidad máxima de 65 millas por hora (105km/h). Ese primer dirigible sirvió como prototipo o como dirigible de pre-serie y realizó labores de ensayos en vuelo y de entrenamiento hasta que fue dado de baja en 1941.
Para entonces, la producción estaba en marcha en Goodyear en Akron, Ohio, para la serie K-2, más grande, rápida y capaz. Realizó su primer vuelo el 6 de diciembre de 1938. (La Armada asumió todas las operaciones de más ligeros que el aire en 1937, poniendo fin a los esfuerzos separados del Ejército y la Armada; la disposición del Los Ángeles [ZR-3] en 1939 marcó el fin del programa de dirigibles rígidos de la Armada).
Se produjeron un total de 134 dirigibles de la serie K por parte de Goodyear. A finales de 1942, la compañía construía cinco dirigibles de la serie K al año, y alcanzó una producción máxima de 11 por mes a mediados de 1943. Había varias subseries, que diferían principalmente en el tamaño del globo y los motores.
Durante la Segunda Guerra Mundial, los dirigibles estaban equipados con una ametralladora calibre .50 en la parte frontal de la góndola y podían llevar cuatro cargas de profundidad Mk-47 de 325 libras.
Cargando las cargas de profundidad
Algunos dirigibles de la serie K estaban equipados con el radar ASG, que mostraba ecos de retorno en un indicador de posición similar a un mapa; tenía un alcance de unas 90 millas para objetos superficiales pequeños. También se instaló un detector de anomalías magnéticas (MAD) que podía detectar la presencia de un submarino en aguas relativamente poco profundas. La limitación de profundidad del MAD requería que el dirigible volara bastante bajo, y, por supuesto, el sistema identificaría los pecios metálicos de naufragios en aguas poco profundas
Durante la guerra, los dirigibles de la US Navy, principalmente los de la serie K, realizaron 37000 patrullas, la mayoría frente a las costas atlánticas de América del Norte y del Sur, sobre el Caribe y, más tarde en la guerra, sobre el Estrecho de Gibraltar y el Mediterráneo occidental.
Los primeros dirigibles no rígidos de cualquier nación en cruzar el Atlántico fueron seis dirigibles de la serie K que volaron desde South Weymouth, Massachusetts, a través de Terranova y las Azores hasta Port Lyautey (ahora Kenitra) en Marruecos francés durante junio de 1944. El tiempo de vuelo para cada una de las tres etapas fue de aproximadamente 20 horas. Más dirigibles los siguieron a través del Atlántico.
Estos dirigibles buscaron submarinos en las del estrecho utilizando y más tarde se emplearon para localizar minas en puertos del Mediterráneo.
La secuencia de producción de los dirigibles de la serie K no fue sencilla, con sus números fuera de secuencia con las subseries. Y, como se mencionó anteriormente, el tamaño del «globo» y los motores variaban según la subserie. Después de la guerra, algunos dirigibles de la serie K fueron reconstruidos extensamente, aún más grandes.
Durante la guerra, los dirigibles de la serie K fueron designados como ZNP-K, donde la “Z” indicaba más ligero que el aire, la “N” no rígido y la “P” patrulla. Los dirigibles individuales se identificaban (generalmente) mediante números secuenciales, como ZNP-K-2, etc. Invariablemente, se les identificaba simplemente por sus designaciones de la serie K. Los dirigibles reconstruidos después de la guerra llevaron las designaciones de serie ZP4K y ZP5K, que posteriormente se cambiaron a ZSG-4 y ZS2G-1, respectivamente.
Pero sí hay un enfrentamiento entre un dirigible y un U-boat.
K-74 Vs U-134
Ese “hundimiento” de un U-boat ocurrió en la noche del 18 al 19 de julio de 1943, cuando los dirigibles K-32 y K-74 patrullaban sobre los Estrechos de Florida. El destructor USS Dahlgren (DD-187) también estaba en la zona. Los dos dirigibles detectaron al U-134 alemán con su radar, y el K-74 atacó. El U-boat permaneció en la superficie y luchó contra el dirigible.
La tripulación del K-74, al detectar que el U-134 salía a la superficie para recargar sus baterías -un momento necesario pero vulnerable para cualquier submarino- se enfrentó a una decisión crítica. El protocolo estándar para las aeronaves implicaba el reconocimiento y la presentación de informes, permitiendo a las fuerzas navales de superficie emprender acciones directas.
Ametrallador de morro
Sin embargo, el U-134 se dirigía directamente a los buques de suministro aliados. Esto llevó al capitán del K-74 a ignorar el protocolo y atacar al U-Boot. El U-134 era un Tipo VIIC.
Armado con cargas de profundidad, la principal arma antisubmarina de la época, el K-74 inició su aproximación hacia el U-134. Las cargas de profundidad, diseñadas para detonar a profundidades predeterminadas, eran una herramienta eficaz contra los submarinos sumergidos, pero su despliegue desde una aeronave, especialmente en un escenario de asalto directo a un submarino emergido, distaba mucho de ser convencional.
La respuesta del U-134 fue rápida y defensiva, haciéndole frente con su cañón antiaéreo de 20 mm. El K-74 respondió con una ametralladora del calibre 50. Había comenzado un amargo duelo mientras la aeronave se acercaba a su objetivo.
Existe cierta confusión sobre si las cargas de profundidad del K-74 fallaron durante el ataque, pero los daños bajo la línea de flotación del submarino indicarían que al menos una carga de profundidad explotó en las proximidades. La tripulación del K-74 atacó al submarino con la ametralladora calibre .50 montada en el morro de la góndola, así como con sus armas personales, incluidas una Thompson SMG y pistolas M1911.
Submarino siendo ametrallado
El fuego de respuesta de los cañones antiaéreos de 20 mm del U-Boot averió uno de los motores del K-74, perforó la bolsa de gas en varios lugares e hirió a un tripulante. A cambio, el fuego del K-74 dañó el submarino, los impactos de las grandes balas de calibre .50 dañaron el casco del submarino, haciéndolo incapaz de sumergirse. El U-134 abandonó la zona y regresó renqueando a su base en Francia. Nunca llegó a casa. El U-134 fue hundido con todos sus tripulantes a bordo el 27 de agosto de 1943, en el Golfo de Vizcaya, por la fragata británica HMS Rother.
El fuego defensivo del submarino resultó efectivo. El K-74 se estrelló en el mar, pero su tripulación sobrevivió al enfrentamiento inicial, pero quedó flotando en el Golfo de México. Permanecieron en el agua hasta el día siguiente, cuando fueron encontrados por un submarino estadounidense.
Lamentablemente, un miembro de la tripulación, Isadore Stessel, perdió la vida por el ataque de un tiburón momentos antes de que pudiera efectuarse el rescate, lo que supuso la única baja de la tripulación de un dirigible de la Marina estadounidense en la Segunda Guerra Mundial.
¿Fueron decisivos los dirigibles en la protección de convoyes?
Los entusiastas de los dirigibles señalan que no se perdió ningún barco en los convoyes escoltados por dirigibles debido a ataques de U-boats. Esto es correcto, pero no es una prueba concluyente, pues cada uno de esos convoyes estaba escoltado también por buques de superficie, y algunos también tenían portaaviones de escolta o “jeep” con aviones que buscaban U-boats. Es difícil demostrar que fuera sólo por la presencia de dirigibles.
Incluso puede que atrayeran la atención de los submarinos. Al final un dirigible de este tamaño es muy visible a larga distancia, y si un submarino avistaba un dirigible, sabría con toda seguridad el rumbo en el que encontraría el convoy.
Durante el comienzo de la Guerra Fría, el Jefe de Operaciones Navales ordenó realizar estudios para evaluar plataformas de vuelo de larga duración que pudieran permanecer en el aire y utilizarse para detectar misiles entrantes de largo alcance y realizar patrullas antisubmarinas.
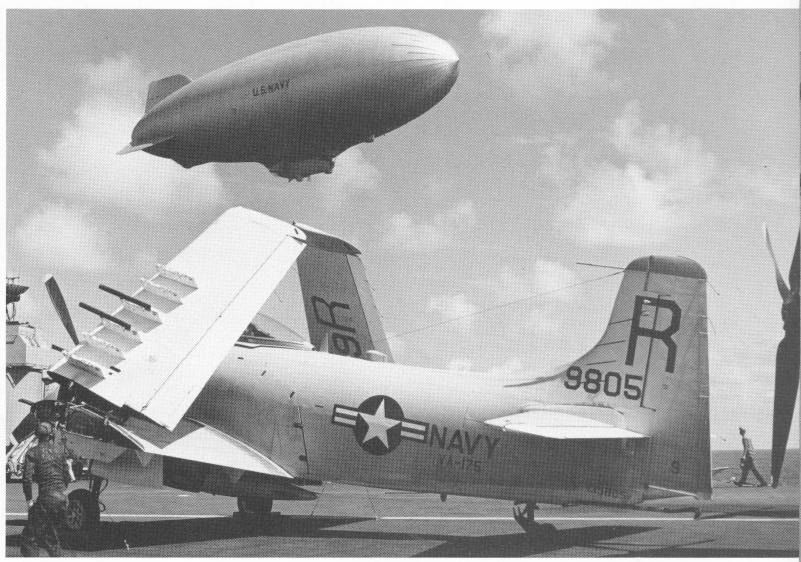
Un dirigible de la serie N y un Skyrider. Uno de los dos parece anacrónico
Los veteranos dirigibles hacía décadas que habían demostrado su eficacia en labores de patrulla y control, así que, por qué no, en plena década de los 50 podían ser aún una solución, temporal, decente para cubrir los vacíos entre las estaciones de radar terrestres, a pesar de su talón de Aquiles con la meteo, así que serían estudiados para estas funciones, y estarían en servicio hasta 1961, cuando el servicio fue cerrado tras una serie de accidentes.