
Esta historia es más o menos paralela a la del Argus As 292, el UAV alemán de 1939 que se ideó como blanco, se desarrolló como avión de reconocimiento, y murió por haber nacido antes de tiempo. Solo que esos años de diferencia en lso desarollos son suficientes como para que el avión americano estuviera en producción más de 40 años y fuera todo un éxito.
El blanco aéreo
A fines de la década de 1930, Radioplane Company había desarrollado una serie de modelos de aviones radiocontrolados como blancos aéreos para el entrenamiento de artillería antiaérea del Army Air Corps.

En 1952, Radioplane Co. fue adquirida por Northrop, y se convirtió en la división de Radioplane, posteriormente Ventura, de Northrop Corporation.
En 1945, Radioplane creó el Modelo RP-19 al reemplazar el motor O-45 en el blanco OQ-17 por un motor O-90 de mayor potencia.
El RP-19 fue probado por la USAAF como YOQ-19 en julio de 1945 y se ordenó su producción en 1946 como OQ-19A.
El OQ-19A tenía un fuselaje de metal y alas de madera, que serían reemplazadas posteriormente por otras también metálicas. Como todos los siguientes miembros de la familia, podría lanzarse desde un lanzador de catapulta, un lanzador giratorio o con cohetes combustible sólido de 9,6 kN de empuje. Los drones de la Fuerza Aérea también podrían lanzarse desde el aire, generalmente desde aviones DB-26C (Los A/B-26 Invader modificados para tal fin).

Los OQ-19 estaban controlados desde una estación terrestre de radio. La recuperación se realizaba con un paracaídas, como los que se montan hoy en día por seguridad en las aeronaves ligeras. Se podía desplegar con una orden desde la estación de radio, o bien de forma automática si se daban los parámetros necesarios que lanzaban tal orden.
En 1950, el XOQ-19B se probó con alas de metal, un motor O-100 más potente y un giroscopio vertical para operaciones fuera de la vista. Este modelo fue producido como el OQ-19B y podía ser seguido por el operador en rangos más allá de la vista usando un sistema de seguimiento por radar de banda X.
El OQ-19D, volado por primera vez en abril de 1950, era similar al OQ-19B, pero carecía de la capacidad de operación fuera de la vista y se rastreaba ópticamente utilizando luces o bengalas de humo montadas en drones.
A partir de 1960, el Ejército de los EE. UU. probó en vuelo el OQ-19E, que era esencialmente un nuevo avión con un nuevo fuselaje de sección circular, alas reforzadas y un motor con compresor McCulloch O-150-4. Aunque el OQ-19E mostró un buen rendimiento, no recibió ningún pedido y en 1961 se dio por terminado el programa.
La Marina de los EE. UU. también utilizó la familia de drones OQ-19, designándolos KD2R Quail.
La versión de producción inicial de la USN fue el KD2R-1, idéntico al OQ-19A. El KD2R-2 era similar al -1, excepto por una radio de 28V y un sistema de estabilización (el NAMTC -Centro de pruebas de misiles aéreos navales- probó sistemas de estabilización en el KD2R-2E).
El KD2R-3 era idéntico al OQ-19D y el XKD2R-4 era un desarrollo del -3 excepto por el motor y el sistema de estabilización. Es posible que el XKD2R-4 fuera similar al OQ-19E.
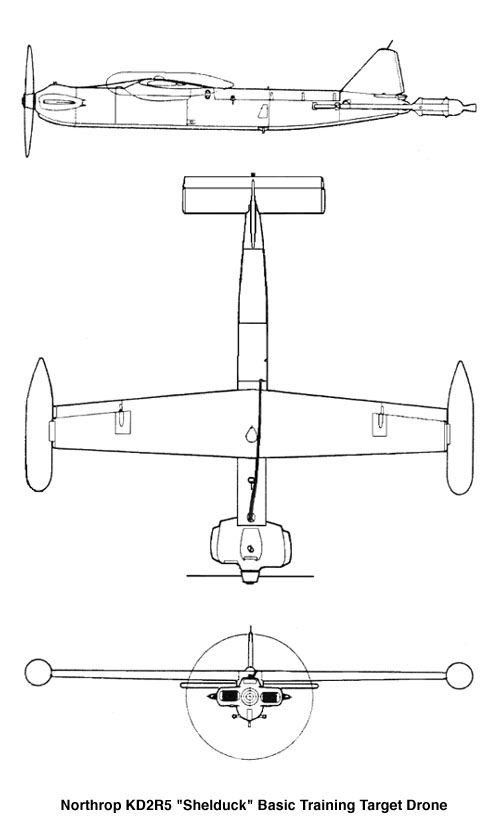
El KD2R-5 Shelduck era un modelo mejorado, que luego fue redesignado como MQM-36A.
Entre 1950 y 1960, se construyeron grandes cantidades, unas 20000 unidades, de OQ-19/KD2R. Para 1963, solo las versiones OQ-19B/D todavía estaban en uso en el Ejército, y la Marina había descartado todos los modelos excepto el KD2R-5.
En junio de ese año, con la reorganización y los cambios de dedisgnación, las variantes que aún estaban en servicio fueron redesignadas de la siguiente manera:
- OQ-19B >> MQM-33A
- OQ-19D >> MQM-33B
- KD2R-5 >> MQM-36A
En 1973, Northrop introdujo un nuevo sistema de mando y control para los blancos MQM-33. Cuando estaban equipados con este sistema, el MQM-33A y el MQM-33B se convirtieron en el MQM-33C y el MQM-33D, respectivamente.
En la década de 1980, la familia de drones OQ-19 se conocía generalmente como BTT (Basic Training Target), y se construyeron más de 73000 drones de todas las versiones BTT (OQ-19, KD2R, MQM-33, MQM-36).
La producción del MQM-33C para la Guardia Nacional del Ejército de EE. UU. continuó hasta finales de la década de 1980. Ya no está en servicio.
El MQM-33 fue uno de esos blancos aéreos concebidos para ser baratos y poder ser derribados por la artillería antiaérea en prácticas de tiro. En producción en varias versiones durante más de 40 años, es uno de los objetivos más exitosos jamás construidos.
El dronde de foto-reconocimiento
_500.jpg)
Otro derivado del MQM-33 fue el dron de vigilancia MQM-57 Falconer.
En 1955, Radioplane desarrolló el RP-7l Falconer como un derivado de la serie de drones-blanco-aéreo OQ-19/MQM-33.
El Falconer era similar en apariencia al Shelduck, pero tenía un fuselaje un poco más largo y definitivamente más robusto. Tenía un sistema de piloto automático, además del sistema de radiocontrol, y podía llevar cámaras, así como bengalas de iluminación para reconocimiento nocturno. El equipo se cargaba a través de un carenado en la parte trasera, entre las alas.
Aunque solo tenía una autonomía de poco más de media hora, por lo que su uso era limitado, aparentemente el Falconer entró en servicio a nivel internacional con varios ejércitos diferentes.
El dron era lanzado desde un raíl en una plataforma transportable, por un cohete de combustible sólido, y era recuperado en paracaídas. El RP-71 tenía cámaras de fotos a bordo como equipamiento normal, y cámaras de TV como opcional y fue utilizado por el ejército de los EE. UU. como avión de reconocimiento.
El UAV en sí era conocido como AN/USD-1, aunque esta era realmente la designación de todo el sistema de vigilancia de drones, incluido el equipo de tierra (UAS). En otras ocasiones se abreviaba su nombre como SD-1.
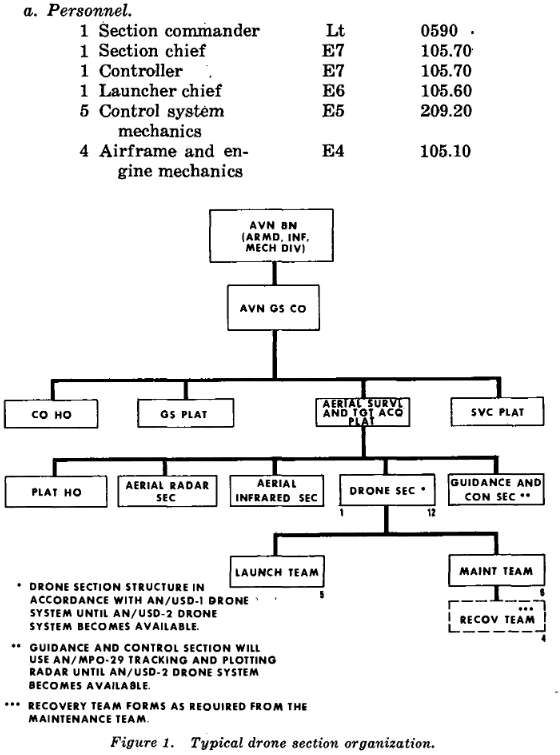
La misión de la sección de drones era realizar fotografía aérea, reconocimiento y vigilancia, y adquisición de datos del objetivo, junto con una estación de mando que estaba equipada con radar móvil como unidad de seguimiento.
Del manual:
- Capacidades.
- Proporciona a las divisiones blindadas, de infantería e infantería mecanizada, y a los regimientos de caballería blindada capacidad de reconocimiento fotográfico diurno y nocturno, adquisición de objetivos y vigilancia
- Realiza misiones cuando y donde el empleo de aeronaves tripuladas no es factible o deseable, y cuando los aviones tripulados no están disponibles (por ejemplo, cuando la meteo es adversa, donde la radiación es grande, o donde el aire hostil y las capacidades de defensa son limitadas).
- Realiza vigilancia aérea fotográfica y reconocimiento donde no hay posibilidad de realizar una pista de aterrizaje, o sin necesidad de preparar una zona de despegue y aterrizaje.
- Capacidad de lanzar un dron tan solo 20 minutos desde la llegada a la zona de lanzamiento.
- Provee mayor seguridad para la división e información precisa del enemigo y del terreno.
- Limitaciones
- El dron tiene una autonomía de 30 minutos, lo que le da un radio de operación aproximado de 65 kilómetros.
- Solo se pueden tomar fotografías verticales satisfactorias a altitudes de 400 pies (120m) sobre el suelo o más.
- Las condiciones meteorológicas imponen las siguientes limitaciones a las operaciones con drones:
- (a) Un techo mínimo de 700 pies y visibilidad de una milla es la condición óptima para el lanzamiento. Sin embargo, para misiones de emergencia, el radar puede fijar el transponder cuando el dron está en el lanzador y hacer el lanzamiento bajo condiciones cero-cero.
- (b) Para obtener fotografías adecuadas, la visibilidad vertical debe estar despejada hasta la altitud de vuelo del drone
- (c) Para emplear el radar de seguimiento AN/MPQ-29, el dron debe mantener una separación mínima de las nubes con alto contenido de humedad o se perderá el contacto de radar.
- (d) El lanzamiento y vuelo de drones es crítico cuando las velocidades del viento superan los 25 nudos o la diferencia entre el viento constante y la ráfaga supera los 15 nudos.
- El número de vuelos de drones por día (24 horas continuas de operación) variará normalmente de cuatro a seis, dependiendo del entrenamiento de la unidad y del mantenimiento del drone.
- Se requieren aproximadamente 50 minutos para completar una misión, desde el momento del lanzamiento hasta la entrega de un negativo húmedo a un intérprete fotográfico, siempre que haya una unidad de procesamiento fotográfico disponible cerca del sitio de recuperación.
- (6) El dron es vulnerable a la mayoría de las armas antiaéreas.
- (7) Los sistemas de guía y seguimiento de drones no son seguros contra las contramedidas electrónicas (ECM).
El drone era controlado por radio de forma remota y se podía seguir bien visualmente, bien por radar.
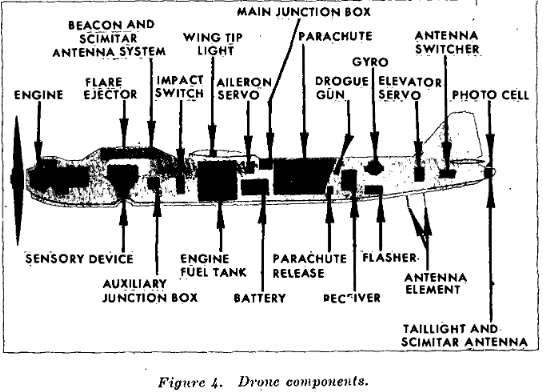
Además del sistema de control remoto, contaba con un piloto automático, basado en un giróscopo que estabilizaba y actuaba sobre los mandos aerodinámicos para lograr un vuelo estable.
Iba equipado con varias cámaras. La KA-20A iba montada en la zona delantera, justo detrás del mamparo del motor, y cargaba 95 instantáneas por carrete, para fotos cuadradas de 9×9 pulgadas, para foto nocturna, o carretes de 10 fotos para foto nocturna. La limitación de la foto nocturna la imponía el número de cartuchos de flash que podía cargar el drone. Podía operar entre 400ft sobre el suelo y 4000ft de altitud, aunque por la noche se reducía a sólo 1000 o 2000ft.
El alcance teórico del radar indicaba que podía mantener el seguimiento del drone hasta a 95km, asumiendo que el drone volaba mínimo a 400ft sobre el suelo y que no se interponía ningún obstaculo entre ambos. Sin embargo, dado el corto radio de acción del drone, no se habían hecho ensayos y por tanto no había datos a más de 18km.
El equipo de tierra estaba formado por el camión/estación de mando y por un remolque que transportaba un generador de electricidad, además del suministro de combustible. Además se podía instalar una tienda de campaña que hacía las funciones de hangar y taller de reparaciones.
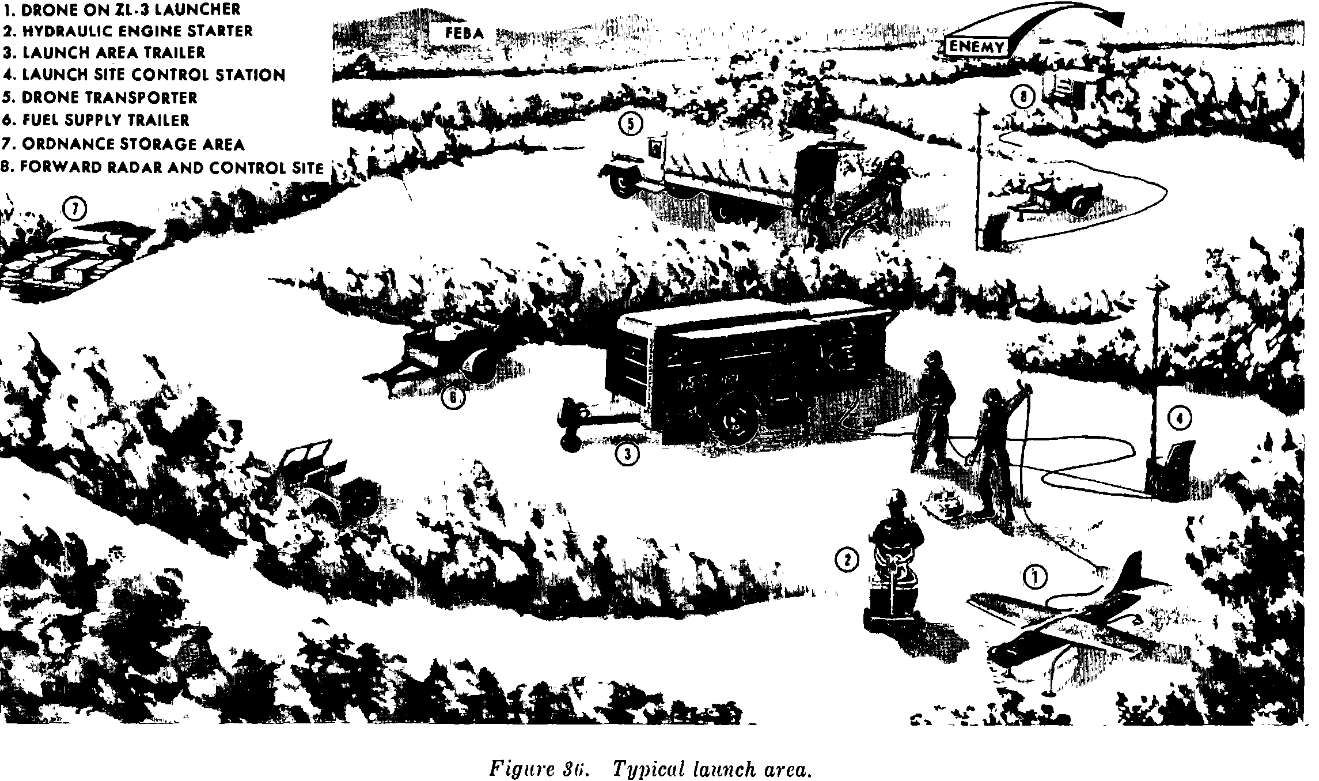
Normalmente, la estación de control en el sitio de lanzamiento se utilizaba para vuelos en línea de visión. El radar AN/MPQ-29 de seguimiento se situaba mínimo a 30m de ésta y a 300m del lanzador, por eso se aconsejaba utilizar distintos grupos electrógenos para cada parte del sistema.
Si se podía conseguir línea de visión directa, se podían hacer lanzamientos exitosos con la estación de control a 3km del lanzador, pero se desaconsejaba su uso, por el retraso en la llegada de los comandos. Por eso en el manual se relegaba su uso a emergencias. Además, en caso de haber más de 300m entre estación de radio y lanzador, se instaba al uso de un teléfono de campaña para comunicación entre ambos. Además se recomendaba que la instalación del «almacén» de todo lo que no estuviera en uso estuviera al menos a 150m de la zona de lanzamiento.
Como toda aeronave, el manual de uso incluía toda una serie de procedimientos previos al lanzamiento. Básicamente revisión e inspección pre-vuelo, instalación de las cámaras de fotos o televisión, instalación del paracaídas, instalación de los cohetes y por último repostaje.
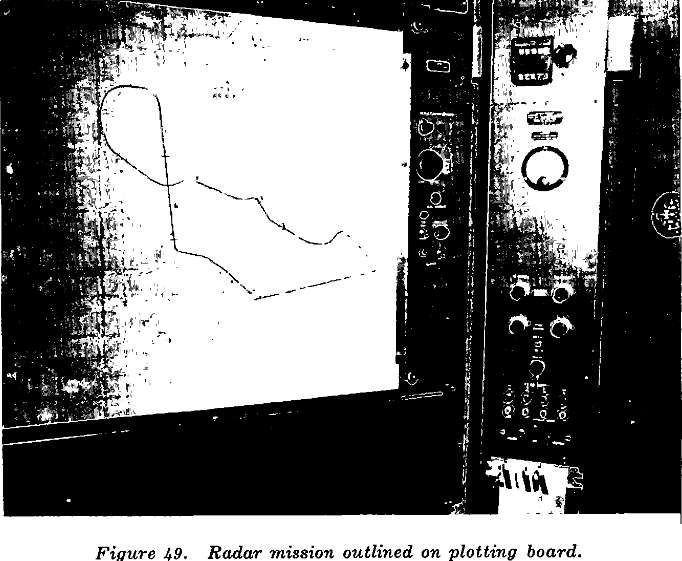
Y, como en toda aeronave, la planificación del vuelo era indispensable. Para ello había que estudiar las cartas de la zona, el objetivo a cubrir, establecer rumbos, altitudes y velocidades, y trazar el rumbo sobre la pantalla del radar de seguimiento, lo que ayudaría al controlador a seguir la ruta predefinida y cumplir la misión asignada.
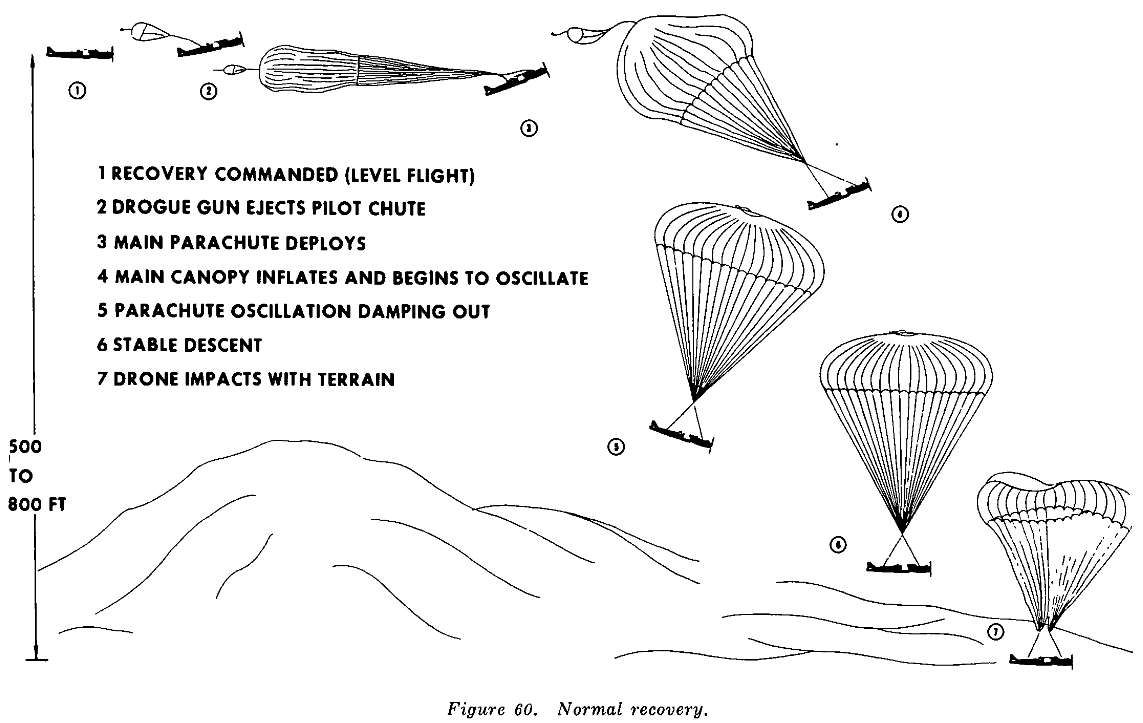
La recuperación, tras el vuelo de vuelta, se realizaba mediante un paracaídas de recuperación balístico (BRS).
La producción en serie del SD-1 para el ejército de los EE. UU. comenzó en 1959. En junio de 1963, los drones RP-71 de los sistemas de vigilancia AN/USD-1A y AN/USD-1B fueron designados como MQM-57A y MQM-57B. respectivamente. El MQM-57 permaneció en servicio hasta mediados de la década de 1970, y Northrop Ventura (anteriormente Radioplane) construyó un total de aproximadamente 1500 MQM-57 de todas las versiones.
Fuentes
Y una vez más, gracias a @MassiasThanos por darnos a conocer este vídeo y este drone.
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.