El ULTRA (Unmanned Long-Endurance Tactical Reconnaissance Aircraft — «Aeronave Táctica de Reconocimiento de Larga Duración No Tripulada») de la Fuerza Aérea de los Estados Unidos hizo una rara aparición en una ubicación no revelada en el Medio Oriente, que algunos usuarios de Twitter han identificado como la base aérea de Al Dhafra, en Emiratos Árabes Unidos. Que se sepa, esta sería la primera vez que se despliega.
Las fotos fueron publicadas en DVIDS (Defense Visual Information Distribution Service), de donde ya han sido eliminadas, después de que la ubicación no identificada fuera reconocida.
Para la vigilancia, tanto Rusia como Estados Unidos utilizan drones MALE/HALE (Medium Altitude/High Altitude Long Endurance) como el MQ-9 Predator, el MQ-4 Global Hawk. Pero en entornos disputados y con alta atrición, reemplazar las plataformas de varios millones de dólares se convierte en un asunto peliagudo, y muy caro. Además, su pérdida también representaría una relación coste-beneficio desfavorable, especialmente cuando son derribados por simples misiles antiaéreos que cuestan menos de un millón de dólares.
Los aviones no tripulados, que nacieron para ser soluciones económicas que no pusieran en peligro vidas humanas en misiones peligrosas, sucias (riesgos NBQ), o tediosas, han tenido éxito, pero ahora mismo son de todo menos económicos. Una historia paralela a la que se vivió con los cazas en el siglo XX, cada vez más caros y pesados, finalmente fue necesario convocar un concurso de cazas ligeros, que dio lugar al F-16. Y ahora se está intentando desarrollar plataformas de inteligencia, mucho más económicas, de desarrollo más rápido, y a ser posible basadas en plataformas ya industrializadas y producidas en serie.
El ULTRA está basado en un motovelero (TMG — Tourism Motor Glider) Stemme, aparentemente el S10, pero con hélice no retráctil.
Los motoveleros de Stemme han sido utilizados en varias conversiones a avión no tripulado de vigilancia, debido a sus estupendas prestaciones (gran diseño del ala, buena aerodinámica del fuselaje, resistencia aerodinámica reducida), como el Safran/Sagem Patroller francés o el Stemme ASP S15 alemán.
El modelo estadounidense se desarrolló en menos de diez meses. Los requisitos, además de la gran autonomía (llega a las 80h), era partir de una plataforma simple, ya industrializada, y cuya producción se pudiera escalar fácilmente a bajo coste. La masa de los pilotos es reemplazada por la de la aviónica de navegación y control y por los sensores y sistemas ópticos.
La integración de sensores Electro-Ópticos/Infrarrojos (EO-IR) y de Radiofrecuencia (RF) de bajo costo es posible debido a las altitudes de operación más bajas que, por lo que no requieren ópticas grandes o RF de alta potencia. Y la integración es sencilla, gracias a la espaciosa cabina diseñada para dos pilotos, dando lugar así a un drone de inteligencia, vigilancia y reconocimiento (ISR) que permanece en el aire durante días. Aunque puede ser derribado, el misil de defensa aérea también revela su posición y esta información puede ser transmitida. Pero su pérdida y su reposición no será tan costosa como en otras plataformas de desarrollo dedicado específico.
Este concepto, por cierto, lo venimos defendiendo hace muchos años en el blog, y hace menos en el podcast: ahorrar costes en el desarrollo de una plataforma dedicada y específica y emplear una célula comercial, probada, y producida en serie, ya industrializada, e invertir en llenarla con sistemas, y producir el avión en masa, para poder probarlo en servicio y poder desarrollar doctrinas para su uso y modificarlo rápidamente con las lecciones aprendidas, precisamente con ese presupuesto que se ha ahorrado utilizando células ya probadas e industrializadas.
Hay quien piensa que estos requisitos han sido validados por la guerra en Ucrania y el punto conflictivo emergente en el Asia-Pacífico, donde China está aprendiendo lecciones de los éxitos y fracasos de Moscú y Kiev. Rusia y Ucrania han estado utilizando drones simples, y disponibles comercialmente, para todo, desde el reconocimiento táctico básico en el campo de batalla y la corrección del fuego de artillería, hasta su conversión en munición merodeadora. Y no solo con drones de pequeño tamaño, ¡también con aviones ultraligeros!
Asumiendo que no nos equivocamos al identificar la célula como perteneciente a un StemmeS10, y que sus características no hab variado gran cosa al ser modificado, el tamaño y las características serían:
Longitud: 8.42 m (27 ft 7 in)
Envergadura: 23.00 m (75 ft 6 in) (excluding winglets)
Altura: 1.80 m (5 ft 11 in)
Superficie Alar: 18.70 m2 (201 sq ft)
Alargamiento alar: 28.3
Peso en vacío: 645 kg (1,422 lb)
Peso al despegue: 850 kg (1,874 lb)
Motor: 1 × Rotax 914 F2/S1 115cv
Velocidad de crucero: 259 km/h (161 mph, 140 kn)
Velocidad de pérdida: 78 km/h (48 mph, 42 kn)
VNE: 270 km/h (168 mph, 146 kn)
Alcance: 1,730 km (1,075 mi, 934 nmi)
Techo de servicio: 9,140 m (30,000 ft)
Límites: +5.3/-2.65 Gs
Máximo planeo: 50:1
US Air Force Unmanned Long-Endurance Tactical Reconnaissance Aircraft crew chiefs prep an ULTRA for taxi before takeoff at an undisclosed location within Central Command area of responsibility on May 7. ULTRA is an unmanned aerial system capable of flight times up to 80 hours. pic.twitter.com/qz9U6taBqM
The 'undisclosed location' is Al Dhafra Air Base in the UAE. The ULTRA drone can be seen in one of the photos occupying hangar 5 which was used to house global hawks in the past. https://t.co/MrAs3qvnO2pic.twitter.com/BOgORmaXUc
Esta historia es más o menos paralela a la del Argus As 292, el UAV alemán de 1939 que se ideó como blanco, se desarrolló como avión de reconocimiento, y murió por haber nacido antes de tiempo. Solo que esos años de diferencia en lso desarollos son suficientes como para que el avión americano estuviera en producción más de 40 años y fuera todo un éxito.
El blanco aéreo
A fines de la década de 1930, Radioplane Company había desarrollado una serie de modelos de aviones radiocontrolados como blancos aéreos para el entrenamiento de artillería antiaérea del Army Air Corps.
En 1952, Radioplane Co. fue adquirida por Northrop, y se convirtió en la división de Radioplane, posteriormente Ventura, de Northrop Corporation.
En 1945, Radioplane creó el Modelo RP-19 al reemplazar el motor O-45 en el blanco OQ-17 por un motor O-90 de mayor potencia.
El RP-19 fue probado por la USAAF como YOQ-19 en julio de 1945 y se ordenó su producción en 1946 como OQ-19A.
El OQ-19A tenía un fuselaje de metal y alas de madera, que serían reemplazadas posteriormente por otras también metálicas. Como todos los siguientes miembros de la familia, podría lanzarse desde un lanzador de catapulta, un lanzador giratorio o con cohetes combustible sólido de 9,6 kN de empuje. Los drones de la Fuerza Aérea también podrían lanzarse desde el aire, generalmente desde aviones DB-26C (Los A/B-26 Invader modificados para tal fin).
Originalmente A-26C Invader, B-26C tras el cambio del sistema de designaciones, y modificado como porta-drones, DB-26C
Los OQ-19 estaban controlados desde una estación terrestre de radio. La recuperación se realizaba con un paracaídas, como los que se montan hoy en día por seguridad en las aeronaves ligeras. Se podía desplegar con una orden desde la estación de radio, o bien de forma automática si se daban los parámetros necesarios que lanzaban tal orden.
En 1950, el XOQ-19B se probó con alas de metal, un motor O-100 más potente y un giroscopio vertical para operaciones fuera de la vista. Este modelo fue producido como el OQ-19B y podía ser seguido por el operador en rangos más allá de la vista usando un sistema de seguimiento por radar de banda X.
El OQ-19D, volado por primera vez en abril de 1950, era similar al OQ-19B, pero carecía de la capacidad de operación fuera de la vista y se rastreaba ópticamente utilizando luces o bengalas de humo montadas en drones.
A partir de 1960, el Ejército de los EE. UU. probó en vuelo el OQ-19E, que era esencialmente un nuevo avión con un nuevo fuselaje de sección circular, alas reforzadas y un motor con compresor McCulloch O-150-4. Aunque el OQ-19E mostró un buen rendimiento, no recibió ningún pedido y en 1961 se dio por terminado el programa.
La Marina de los EE. UU. también utilizó la familia de drones OQ-19, designándolos KD2R Quail.
La versión de producción inicial de la USN fue el KD2R-1, idéntico al OQ-19A. El KD2R-2 era similar al -1, excepto por una radio de 28V y un sistema de estabilización (el NAMTC -Centro de pruebas de misiles aéreos navales- probó sistemas de estabilización en el KD2R-2E).
El KD2R-3 era idéntico al OQ-19D y el XKD2R-4 era un desarrollo del -3 excepto por el motor y el sistema de estabilización. Es posible que el XKD2R-4 fuera similar al OQ-19E.
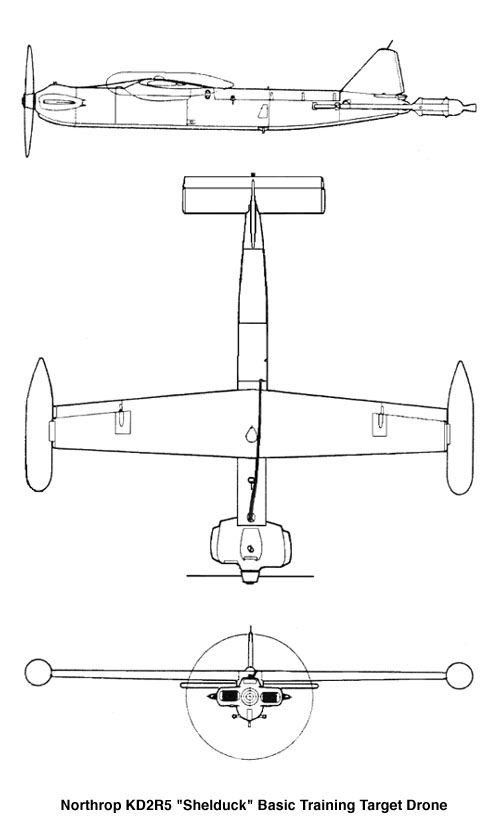
El KD2R-5 Shelduck era un modelo mejorado, que luego fue redesignado como MQM-36A.
Entre 1950 y 1960, se construyeron grandes cantidades, unas 20000 unidades, de OQ-19/KD2R. Para 1963, solo las versiones OQ-19B/D todavía estaban en uso en el Ejército, y la Marina había descartado todos los modelos excepto el KD2R-5.
En junio de ese año, con la reorganización y los cambios de dedisgnación, las variantes que aún estaban en servicio fueron redesignadas de la siguiente manera:
OQ-19B >> MQM-33A
OQ-19D >> MQM-33B
KD2R-5 >> MQM-36A
En 1973, Northrop introdujo un nuevo sistema de mando y control para los blancos MQM-33. Cuando estaban equipados con este sistema, el MQM-33A y el MQM-33B se convirtieron en el MQM-33C y el MQM-33D, respectivamente.
En la década de 1980, la familia de drones OQ-19 se conocía generalmente como BTT (Basic Training Target), y se construyeron más de 73000 drones de todas las versiones BTT (OQ-19, KD2R, MQM-33, MQM-36).
La producción del MQM-33C para la Guardia Nacional del Ejército de EE. UU. continuó hasta finales de la década de 1980. Ya no está en servicio.
El MQM-33 fue uno de esos blancos aéreos concebidos para ser baratos y poder ser derribados por la artillería antiaérea en prácticas de tiro. En producción en varias versiones durante más de 40 años, es uno de los objetivos más exitosos jamás construidos.
El dronde de foto-reconocimiento
Otro derivado del MQM-33 fue el dron de vigilancia MQM-57 Falconer.
En 1955, Radioplane desarrolló el RP-7l Falconer como un derivado de la serie de drones-blanco-aéreo OQ-19/MQM-33.
El Falconer era similar en apariencia al Shelduck, pero tenía un fuselaje un poco más largo y definitivamente más robusto. Tenía un sistema de piloto automático, además del sistema de radiocontrol, y podía llevar cámaras, así como bengalas de iluminación para reconocimiento nocturno. El equipo se cargaba a través de un carenado en la parte trasera, entre las alas.
Aunque solo tenía una autonomía de poco más de media hora, por lo que su uso era limitado, aparentemente el Falconer entró en servicio a nivel internacional con varios ejércitos diferentes.
El dron era lanzado desde un raíl en una plataforma transportable, por un cohete de combustible sólido, y era recuperado en paracaídas. El RP-71 tenía cámaras de fotos a bordo como equipamiento normal, y cámaras de TV como opcional y fue utilizado por el ejército de los EE. UU. como avión de reconocimiento.
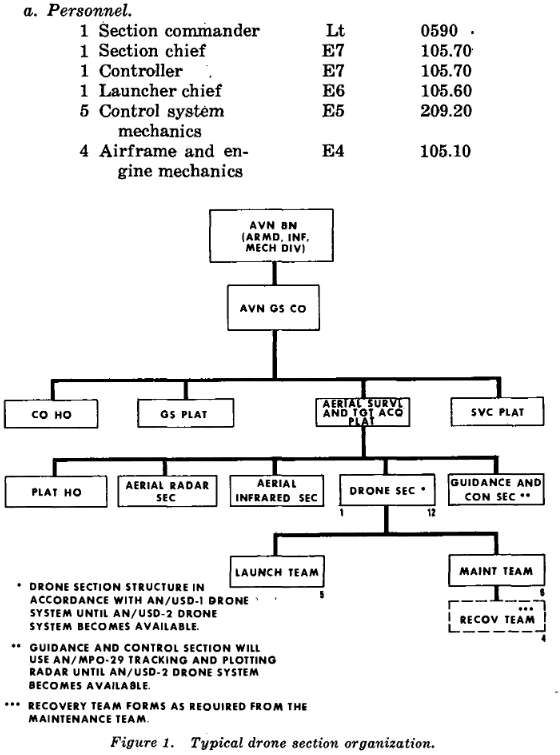
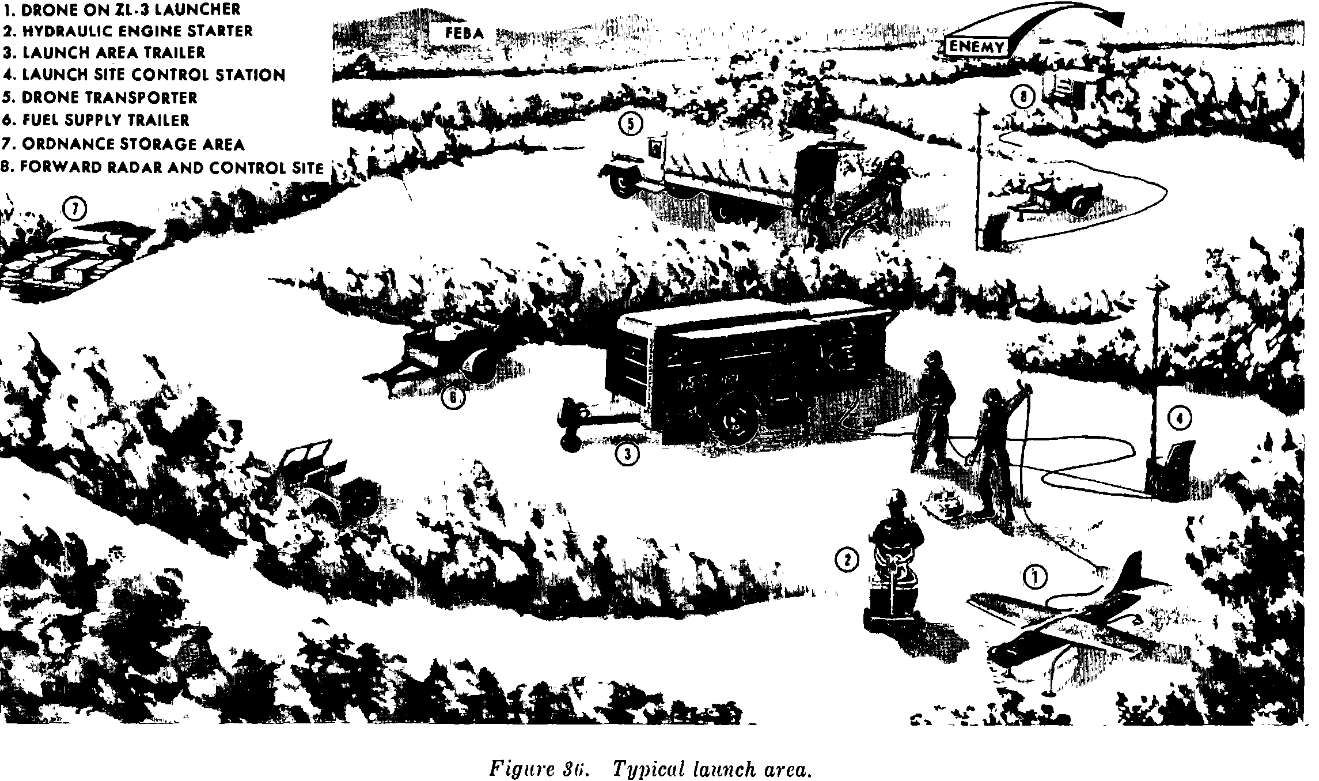
El UAV en sí era conocido como AN/USD-1, aunque esta era realmente la designación de todo el sistema de vigilancia de drones, incluido el equipo de tierra (UAS). En otras ocasiones se abreviaba su nombre como SD-1.
La misión de la sección de drones era realizar fotografía aérea, reconocimiento y vigilancia, y adquisición de datos del objetivo, junto con una estación de mando que estaba equipada con radar móvil como unidad de seguimiento.
Del manual:
Capacidades.
Proporciona a las divisiones blindadas, de infantería e infantería mecanizada, y a los regimientos de caballería blindada capacidad de reconocimiento fotográfico diurno y nocturno, adquisición de objetivos y vigilancia
Realiza misiones cuando y donde el empleo de aeronaves tripuladas no es factible o deseable, y cuando los aviones tripulados no están disponibles (por ejemplo, cuando la meteo es adversa, donde la radiación es grande, o donde el aire hostil y las capacidades de defensa son limitadas).
Realiza vigilancia aérea fotográfica y reconocimiento donde no hay posibilidad de realizar una pista de aterrizaje, o sin necesidad de preparar una zona de despegue y aterrizaje.
Capacidad de lanzar un dron tan solo 20 minutos desde la llegada a la zona de lanzamiento.
Provee mayor seguridad para la división e información precisa del enemigo y del terreno.
Limitaciones
El dron tiene una autonomía de 30 minutos, lo que le da un radio de operación aproximado de 65 kilómetros.
Solo se pueden tomar fotografías verticales satisfactorias a altitudes de 400 pies (120m) sobre el suelo o más.
Las condiciones meteorológicas imponen las siguientes limitaciones a las operaciones con drones:
(a) Un techo mínimo de 700 pies y visibilidad de una milla es la condición óptima para el lanzamiento. Sin embargo, para misiones de emergencia, el radar puede fijar el transponder cuando el dron está en el lanzador y hacer el lanzamiento bajo condiciones cero-cero.
(b) Para obtener fotografías adecuadas, la visibilidad vertical debe estar despejada hasta la altitud de vuelo del drone
(c) Para emplear el radar de seguimiento AN/MPQ-29, el dron debe mantener una separación mínima de las nubes con alto contenido de humedad o se perderá el contacto de radar.
(d) El lanzamiento y vuelo de drones es crítico cuando las velocidades del viento superan los 25 nudos o la diferencia entre el viento constante y la ráfaga supera los 15 nudos.
El número de vuelos de drones por día (24 horas continuas de operación) variará normalmente de cuatro a seis, dependiendo del entrenamiento de la unidad y del mantenimiento del drone.
Se requieren aproximadamente 50 minutos para completar una misión, desde el momento del lanzamiento hasta la entrega de un negativo húmedo a un intérprete fotográfico, siempre que haya una unidad de procesamiento fotográfico disponible cerca del sitio de recuperación.
(6) El dron es vulnerable a la mayoría de las armas antiaéreas.
(7) Los sistemas de guía y seguimiento de drones no son seguros contra las contramedidas electrónicas (ECM).
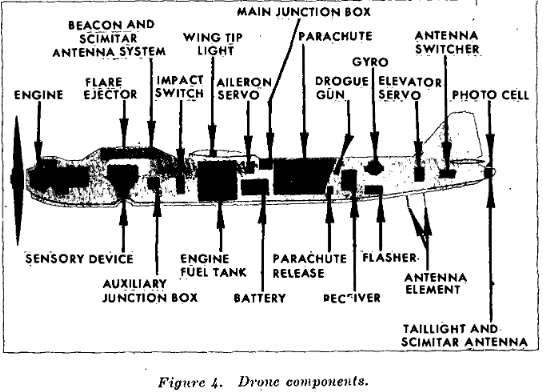
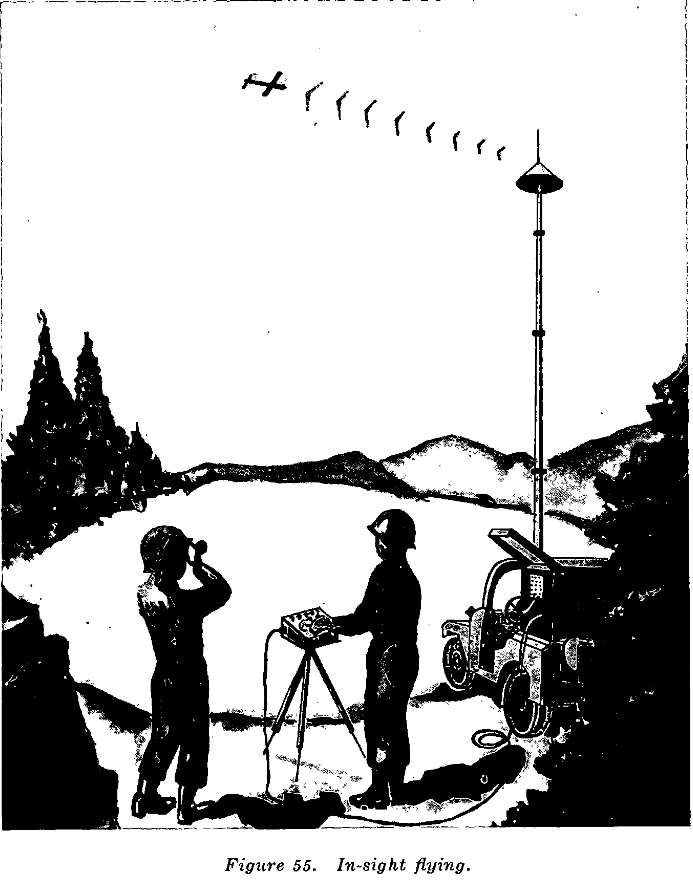
El drone era controlado por radio de forma remota y se podía seguir bien visualmente, bien por radar.
Además del sistema de control remoto, contaba con un piloto automático, basado en un giróscopo que estabilizaba y actuaba sobre los mandos aerodinámicos para lograr un vuelo estable.
Iba equipado con varias cámaras. La KA-20A iba montada en la zona delantera, justo detrás del mamparo del motor, y cargaba 95 instantáneas por carrete, para fotos cuadradas de 9×9 pulgadas, para foto nocturna, o carretes de 10 fotos para foto nocturna. La limitación de la foto nocturna la imponía el número de cartuchos de flash que podía cargar el drone. Podía operar entre 400ft sobre el suelo y 4000ft de altitud, aunque por la noche se reducía a sólo 1000 o 2000ft.
El alcance teórico del radar indicaba que podía mantener el seguimiento del drone hasta a 95km, asumiendo que el drone volaba mínimo a 400ft sobre el suelo y que no se interponía ningún obstaculo entre ambos. Sin embargo, dado el corto radio de acción del drone, no se habían hecho ensayos y por tanto no había datos a más de 18km.
El equipo de tierra estaba formado por el camión/estación de mando y por un remolque que transportaba un generador de electricidad, además del suministro de combustible. Además se podía instalar una tienda de campaña que hacía las funciones de hangar y taller de reparaciones.
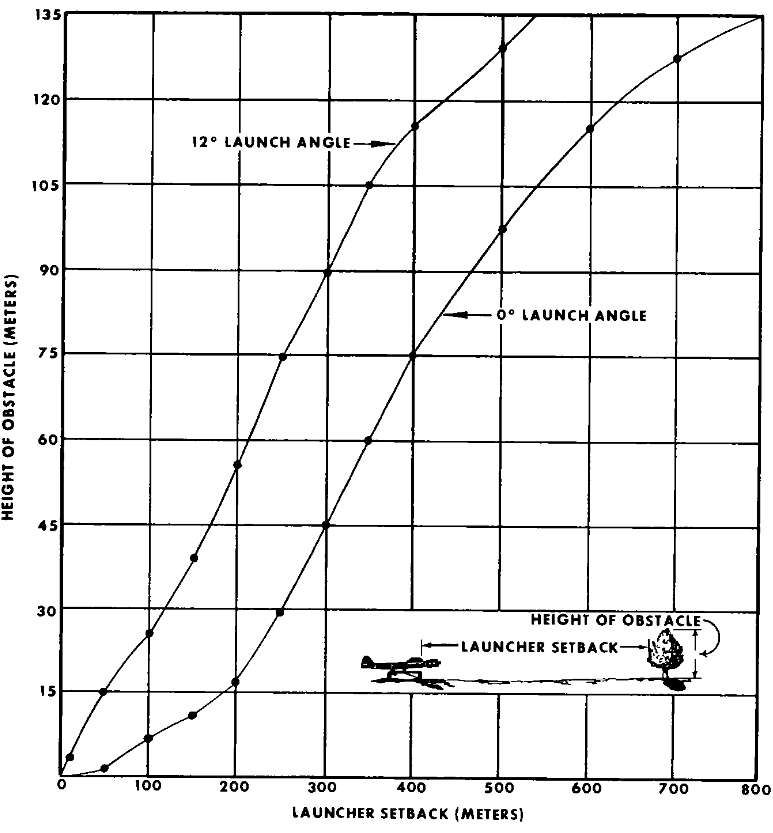
Instalación de la rampa de lanzamiento, distancia a los obstáculos para sobrepasarlos
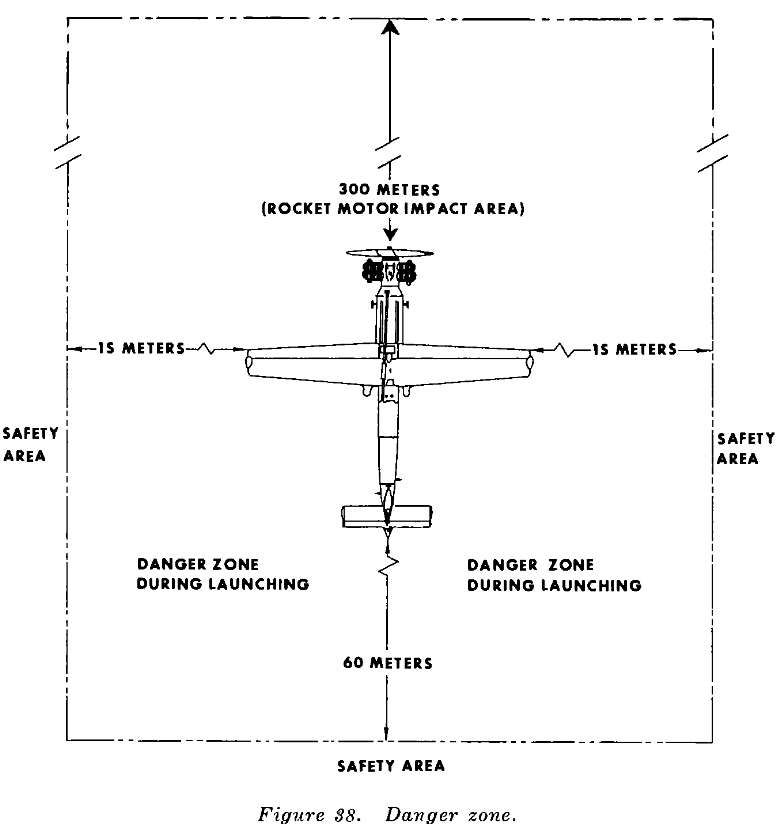
Instalación de la rampa, zona de seguridad
Normalmente, la estación de control en el sitio de lanzamiento se utilizaba para vuelos en línea de visión. El radar AN/MPQ-29 de seguimiento se situaba mínimo a 30m de ésta y a 300m del lanzador, por eso se aconsejaba utilizar distintos grupos electrógenos para cada parte del sistema.
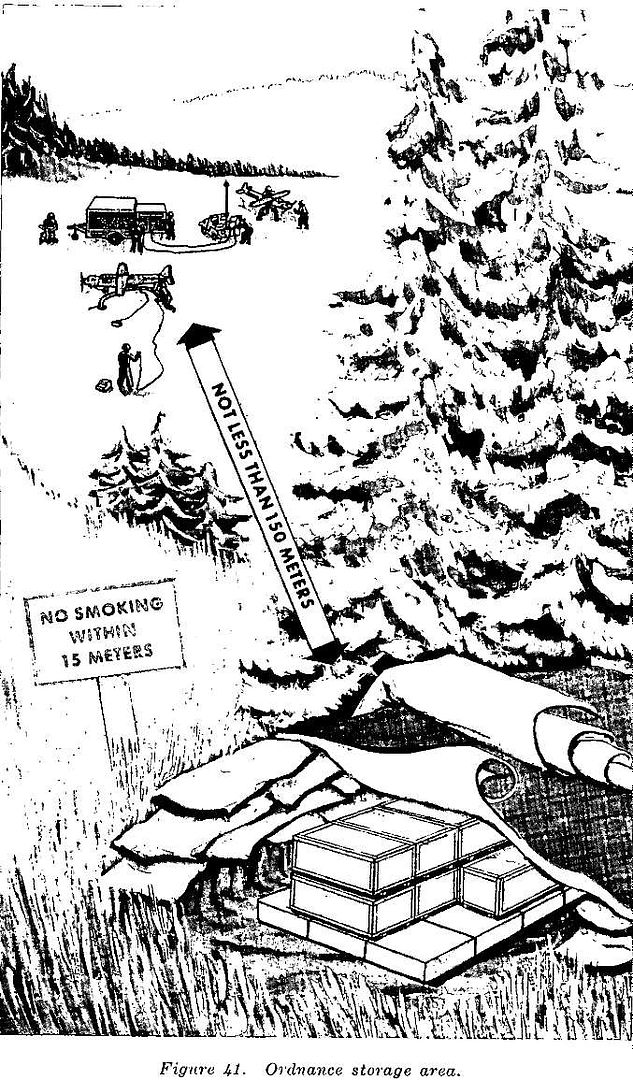
Si se podía conseguir línea de visión directa, se podían hacer lanzamientos exitosos con la estación de control a 3km del lanzador, pero se desaconsejaba su uso, por el retraso en la llegada de los comandos. Por eso en el manual se relegaba su uso a emergencias. Además, en caso de haber más de 300m entre estación de radio y lanzador, se instaba al uso de un teléfono de campaña para comunicación entre ambos. Además se recomendaba que la instalación del «almacén» de todo lo que no estuviera en uso estuviera al menos a 150m de la zona de lanzamiento.
Como toda aeronave, el manual de uso incluía toda una serie de procedimientos previos al lanzamiento. Básicamente revisión e inspección pre-vuelo, instalación de las cámaras de fotos o televisión, instalación del paracaídas, instalación de los cohetes y por último repostaje.
Y, como en toda aeronave, la planificación del vuelo era indispensable. Para ello había que estudiar las cartas de la zona, el objetivo a cubrir, establecer rumbos, altitudes y velocidades, y trazar el rumbo sobre la pantalla del radar de seguimiento, lo que ayudaría al controlador a seguir la ruta predefinida y cumplir la misión asignada.
Operación en línea de visión
Tablero de seguimiento para misiones más allá de la línea de visión
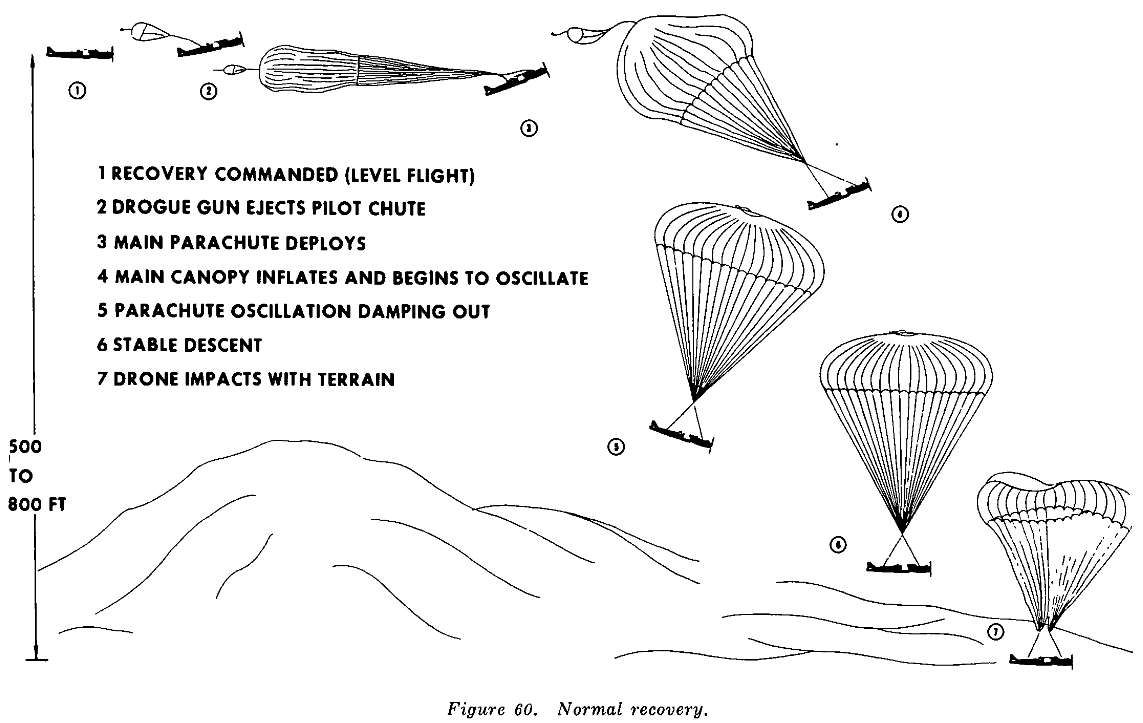
La recuperación, tras el vuelo de vuelta, se realizaba mediante un paracaídas de recuperación balístico (BRS).
La producción en serie del SD-1 para el ejército de los EE. UU. comenzó en 1959. En junio de 1963, los drones RP-71 de los sistemas de vigilancia AN/USD-1A y AN/USD-1B fueron designados como MQM-57A y MQM-57B. respectivamente. El MQM-57 permaneció en servicio hasta mediados de la década de 1970, y Northrop Ventura (anteriormente Radioplane) construyó un total de aproximadamente 1500 MQM-57 de todas las versiones.
Jean Stampe se formó como piloto militar durante la Primera Guerra Mundial. Desde 1916 realiza salidas, incluso llevando al Alberto I como observador sobre el campo de batalla. Coninuaría volando para el rey hasta su muerte.
En 1928, Renard, el diseñador preocupado de Stampe y conocido en este blog por su avión presurizado de los años 30, dejó la firma Stampe et Vertongen para fundar su propia compañía aeronáutica.
Stampe, por recomendación de su hijo Leon Stampe, fichó para sustitiur a Renard al ingeniero ruso George (Yury) Ivanov. El primer avión de Ivanov aparentemente fue el SV-3. Su último desarrollo sería el SV-10, nacido por una petición de la Aviación Militar Belga.
En 1934, la Aviación Militar belga había concebido un plan para equipar sus escuadrones de bombardeo con bombarderos medios altamente armados. Dos fabricantes de aviones belgas no dudaron en diseñar una máquina de este tipo.
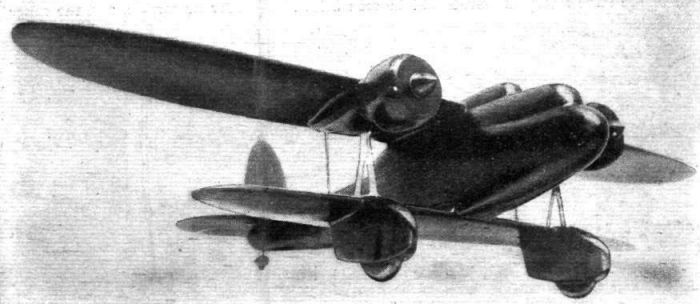
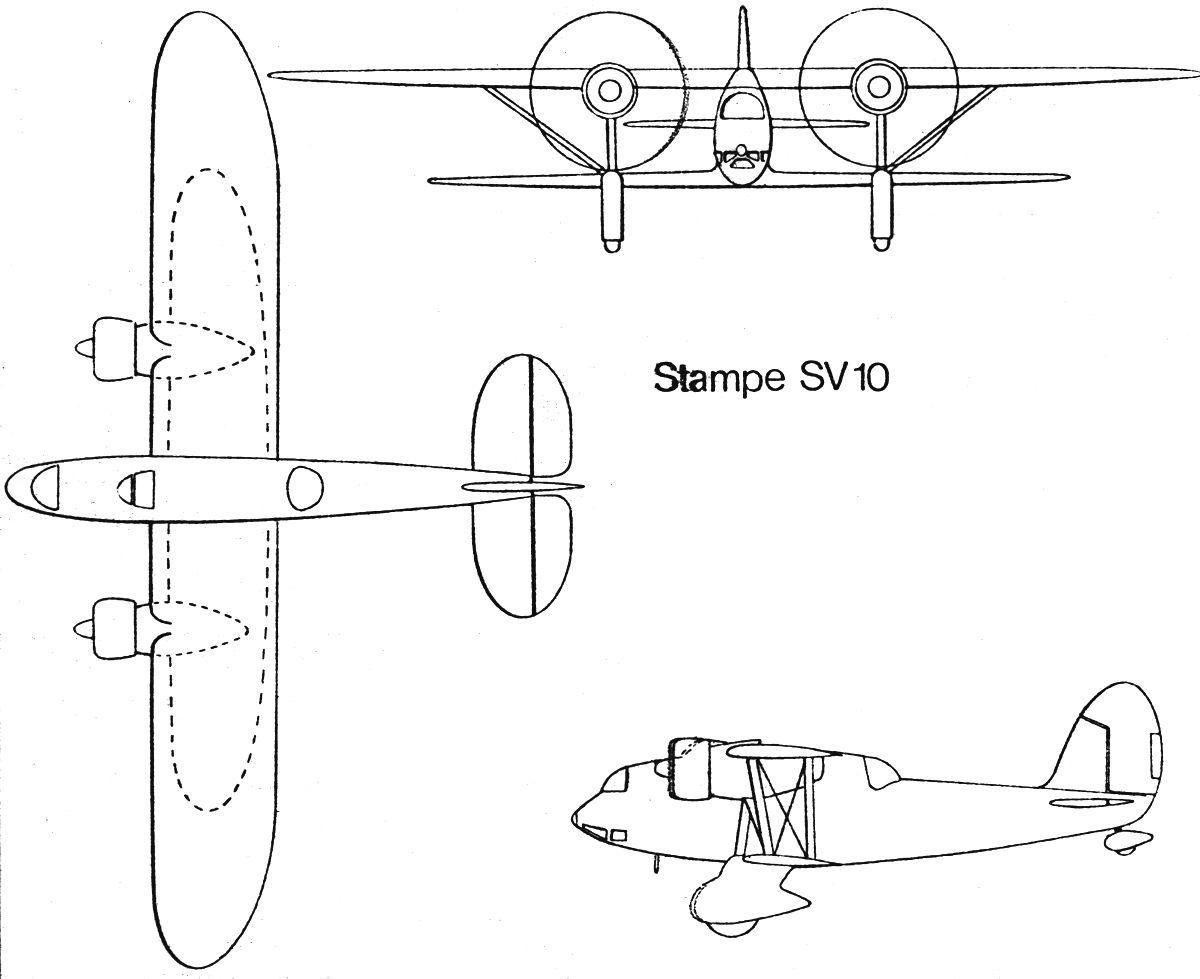
El otro fue Stampe & Vertongen. El bimotor SV-10 fue una creación de George Ivanow, el ingeniero de la casa. Léon Stampe, hijo de Jean Stampe y sargento piloto de reserva en la Aviación Militar, sería el piloto de pruebas.
Estaba diseñado como avión multipropósito: caza pesado, reconocimiento y bombardero. Estaba movido por dos Gnome Rhone 14 Krsd radiales de 780 hp (800, según otras fuentes). Su tripulación estaba compuesta por el piloto, un artillero de morro/bombardero y un artillero de cola que manejaba dos ametralladoras. Desconocemos cuál de los dos artilleros hacía las labores de navegante y radio. La velocidad máxima estimada era de 350km/h. Iba armado con un cañón de 20mm, cinco ametralladoras de 7.5mm y podía transportar hasta 600kg de bombas.
El primer vuelo fue el 4 de octubre de 1935.
En la tarde del sábado 5 de octubre, Léon Stampe e Ivanow despegaron para un segundo vuelo, ahora ya con escarapelas belgas decorando el avión.
El despegue transcurrió sin problemas y el bombardero subió a una altura de 1000ft/300m. Después de dar un amplio viraje de 180°, voló lentamente sobre el aeródromo.
Pero de repente el SV-10 comenzó a girar hacia la izquierda. El piloto corrigió rápidamente, pero la aeronave volvió a girar casi de inmediato y se lanzó al suelo a una velocidad vertiginosa. Primero cayó sobre el techo de una casa en Aeszaklaan te Borsbeek, luego golpeó un árbol, derribó un muro de siete metros de largo y finalmente se estrelló contra unos árboles en el jardín del edificio mencionado. Tanto el piloto como el ingeniero jefe, que iba a bordo, murieron. El desarrollo posterior fue abandono.
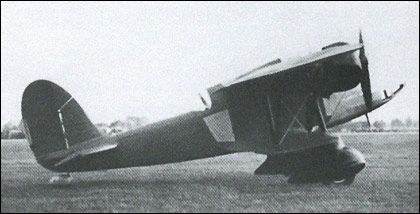
El piojo del cielo es un conocido ultraligero francés de los años 30, desarrollado por Henri Mignet. Un desarrollo muy ligero y, en teoría, fácil de volar, al ser una aeronave de dos ejes: solo cabeceo y dirección, el alabeo se logra gracias al acoplamiento entre alabeo y cabeceo, y el dihedro del segmento exterior del ala.
Es un biplano, con las alas en tándem, sin alerones ni timón de profundidad. La palanca de mando actúa sobre el timón de dirección, para virar, y sobre una de las alas, que pivota para cambiar su ángulo de ataque y tener así control de profundidad.
Comenzó su desarrollo como monoplaza, e incluso hubo alguna versión de mayor tamaño. Pero hoy nos vamos a centrar en la versión militar: el Pou Maquis.
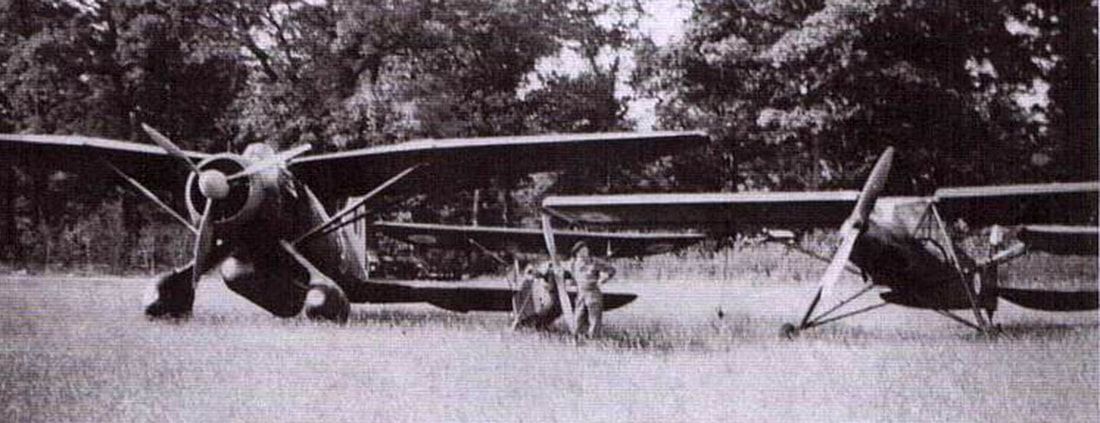
La Pou du Ciel es una aeronave pequeña, ligera, fácil de remolcar y ocultar.
Pou du ciel que fotografié en Bruselas, en el Museo Real del Ejército, con menos de 20CV
Por eso Albert Eon, jefe de la resistencia francesa en Bretaña se aproximó a Henri Mignet en 1944 para pedirle un desarrollo militar con alas plegables: era ideal para ocultar en bosques, graneros y podía dotar a la resistencia de un aparato pequeño, silencioso y difícil de detectar en vuelo, útil para realizar vuelos de enlace, infiltración e incluso sabotaje. Así nació el HM-280.
La mujer de Mignet murió durante el desarrollo del avión, lo que le desmoralizó bastante. No obstante llegaría a finalizar un prototipo que, si bien no vería servicio durante la guerra, sí sería probado después. En diciembre de 1945 aparecería en la revista L’Aérophile un artículo llamado El piojo del cielo hace el servicio militar.
HM-280, Arma de guerra
El Coronel Eon, al mando del campamento de Frileuse había organizado el sábado 30 de noviembre con la asistencia del Sr. Mignet una demostración del HM 280, tipo militar. Es probable que este dispositivo sea de gran utilidad para la lucha clandestina gracias a su maniobrabilidad y su pequeño tamaño. Es el prototipo del HM 290 cuyos planos se han puesto recientemente a disposición de los aficionados y que en la actualidad está siendo construido por muchas personas deseosas de volar de forma económica. El clima no se prestaba bien para tal demostración, chubascos violentos, viento y fuertes ráfagas de hasta más de 15 metros-segundo. H. Mignet realizó un espléndido vuelo donde se destacó la maniobrabilidad de su aeronave. Caídas de ala, «chandelles» y aterrizajes en pocos metros. A pesar de la ausencia de alerones, la estabilidad de la pequeña máquina parecía perfecta. El Coronel Eon invitó a los asistentes a entrar en calor con una taza de té y mostró proyecciones que mostraban los usos prácticos del «Pou du Ciel» como arma de guerra. Para terminar, y esto hará las delicias de todos los constructores aficionados, nos informó que el sitio de Frileuse estaría equipado con un gran hangar este verano y que los propietarios de aviones pequeños podrían venir y albergar allí sus aviones para sus pruebas y ¡Ni siquiera hay que temer a los gendarmes de la Fuerza Aérea allí! A.Reboul
EL PIOJO DEL CIELO HA HECHO SU SERVICIO MILITAR Un artículo de la revista «L’Aérophile» de diciembre de 1945
Prototipo original. Compárese su tamaño con el del Lysander o la Storch
También era protagonista en Les Ailes.
El H.M.-280 es la versión más reciente de la fórmula de Henri Mignet, la que precede al H.M.-290, una aeronave de construcción amateur. Como señalamos en otra parte, en la página 8, el 24 de marzo tuvo lugar en Saintes un concurso de maquetas. El interés de esta competición se vio reforzado por la presencia de Henri Mignet quien, durante el transcurso de la tarde, realizó una muy buena demostración de maniobrabilidad a bordo de su H.M.-280. Henri Mignet desató un auténtico entusiasmo entre los espectadores realizando magníficas caídas de ala, «chandelles» -algo notable para un aparato de 30 CV- y pasadas rasantes. Parece que este H.M.-280 constituye un progreso innegable sobre el avión anterior y que su piloto-constructor tiene el control total del mismo. Es el mismo aparato que realizó, el año pasado, alrededor de París, las pruebas de que hemos hablado y que Mignet, una vez terminadas, trajo en vuelo de regreso a Saintes. Este avión ya tiene un número bastante alto de horas de vuelo en su haber. Durante la demostración en Saintes, un aficionado de la región presentó, por su parte, un “Pou-du-Ciel” que también logró un buen vuelo. Desafortunadamente, este terminó en un «piloning» sin demasiado daño, sin embargo, para el piloto.
Les Ailes
Prototipo del HM-280
El HM-280 no tendría éxito como aeronave militar, sin embargo fue desarrollada como aeronave civil de construcción amateur bajo el nombre de HM-290.
HM-290 que fotografié en el Real museo del ejército de Bruselas
No sería, por cierto, el último avión militar de Mignet, puesto que el ejército de tierra francés compraría 24 (26 o 29, según las fuentes) Mignet HM.1000 Balerit.
Tras los ensayos en los 80 para armar un ultraligero, en los 90 se ensayó con el HM-1000. Se buscaba un aparato que se transportara fácilmente por carretera, con alas plegables, y que se pudiera poner en estado de vuelo en menos de cinco minutos.
Durante 18 meses se realizaron pruebas para ver cómo podía encajar en la doctrina militar. El aparato contaba con un piloto y un observador. La idea era dar soporte a los convoyes, proporcionando reconocimiento cercano y haciendo de guías. Además se proponían como medio de enlace rápido con otras unidades.
Cuando estalló la Guerra del Golfo los ensayos aún no habían concluido. Tampoco se juzgó útil para Bosnia, debido a su vulnerabilidad.
Los ensayos terminaron en mayo de 1993. El fabricante introdujo algunos cambios, como un sistema de transmisión de potencia para la hélice más robusto, una nueva hélice, un sistema de combustible mejorado, y una funda resistente a balas para el paracaídas balístico.
Hoy día todas estas funciones, a excepción de las de enlace, se pueden realizar de una forma más segura y discreta con pequeños drones.




_500.jpg)



.jpg)