Todas las potencias están desarrollando aeronaves no tripuladas de combate que entran dentro del concepto de Punto Fiel, o Lowal Wingman en inglés. Básicamente compañeros de vuelo no tripulados capaces de realizar las misiones que los pilotos humanos les asignen, multiplicando así la potencia de fuego de ataque, alejando al humano de la primera línea de fuego, y dándole ventaja respecto al adversario. Lo analizamos con Carlos González.
pd: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utlizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast
Últimamente las noticias de inteligencia artificial utilizada para controlar aviones de combate nos están desbordando, en especial las que llegan del otro lado del Atlántico.
En esta ocasión le toca a la división más especializada y «secreta» de Lockheed Martin ha hecho público que también están trabajando en una inteligencia artificial que dote de autonomía a los drones en situaciones de combate real.
Las pruebas ya no se hacen en un ordenador con un simulador, aunque ha sido como se ha entrenado la IA. Esa IA entrenada en el ordenador está siendo transferida a aviones reales, los L-29 Delfín de origen checo, que están realizando combate real contra enemigos simulados.
A estas alturas ya sabéis la finalidad: tener un enjambre de aviones no tripulados que trabajan de manera colaborativa entre ellos y con aviones tripulados y que reciben órdenes de estos para ayudarlos, convirtiéndose así en puntos fieles que multiplican la potencia de cada vuelo con aeronaves especializadas en ataque a suelo, combate aéreo… como venimos contando cada vez que hablamos del concepto de puntos fieles.
IOWA CITY, Iowa, 5 de junio de 2024 /PRNewswire/ — Lockheed Martin Skunk Works® (NYSE: LMT) se asoció con el Laboratorio OPL de la Universidad de Iowa para demostrar el uso de inteligencia artificial (IA) en escenarios de intercepción aire-a-aire.
Los vuelos exitosos son un hito significativo para el equipo de IA Táctica de Skunk Works, en el que la IA voló directamente y llevó a cabo ejercicios tácticos con una aeronave a escala real en vivo, uno de los jets L-29 Delfin de OPL, utilizando comandos de rumbo, velocidad y altitud. El equipo llevó pruebas de combate real contra un adversario virtual, desde posiciones iniciales de ventaja y defensivas.
Se realizaron ocho casos de prueba por vuelo para ejercitar al agente de IA en una variedad de situaciones, desde iniciar el combate cara a cara, con misiles, en situación de defensa tras haber sido lanzados misiles… El equipo se sintió alentado al ver una transferencia limpia de comportamientos aprendidos de simulación a realidad y que el agente de IA parecía intencional y decisivo en sus acciones.
«Esta fue la primera prueba en vivo de la nueva interfaz de vuelo; es emocionante ver cómo los componentes separados se integran con éxito en el L-29 para demostrar nuevas capacidades. El sistema completo funcionó aún mejor en vuelo en vivo que en simulación,» dijo el Dr. Tom «Mach» Schnell, profesor de OPL en el Instituto de Tecnología de Iowa.
«Las pruebas de vuelo en vivo son un aspecto crucial para avanzar en nuestra experiencia en IA y autonomía. Estos vuelos son demostraciones poderosas de nuestra capacidad para desarrollar y probar rápidamente capacidades de IA operativamente relevantes y de manera asequible,» dijo Matthew «Gabe» Beard, gerente de ingeniería de autonomía/IA y aprendizaje automático de Lockheed Martin Skunk Works.
Estas pruebas de vuelo son parte de una iniciativa más amplia para desarrollar y probar rápidamente la autonomía impulsada por IA para misiones aire-a-aire. Se planean varias otras pruebas de vuelo para este año, construyendo sobre estos logros e incrementando la complejidad al introducir aeronaves adicionales en escenarios de contraataque aéreo ofensivo y gestión de batallas. Lockheed Martin está continuamente elevando el rendimiento de misión de IA en entornos simulados operativamente representativos, utilizando estándares de sistemas de misión abiertos para garantizar una amplia compatibilidad y una transición rápida con plataformas futuras.
Este dogfight entre drones, en el que uno ha perdido varios rotores, ha sido creado por IA con CANVA para poder ilustrar el concepto de combate entre drones desde un punto de vista externo
La guerra entre «robots» ha llegado, podría haber sido el titular buscando el click-bait. Pero, en parte, sería totalmente cierto. Tanto Rusia como Ucrania están haciendo un uso profuso de los vehículos no tripulados. Y se han buscado contramedidas eficaces. Una de las contramedidas más reciente es el uso de vehículos no tripulados para combatir los vehículos no tripulados, habiéndose publicado no menos de cuatro vídeos al respecto.
Posiblemente el primero fue la interceptación de un dronekamikaze ruso, o UAV con ticket sólo de ida, o munición merodeadora, hace tres meses.
Más recientemente hemos visto no solo interceptaciones a vehículos aéreos, sino también de superficie, como a este vehículo naval no tripulado ucraniano por parte de un droneFPV ruso.
En él podemos ver los ya conocidos dronesde carreras convertidos en dispositivos explosivos improvisados (o munición merodeadora o drone kamikaze) dando caza a un vehículo marítimo no tripulado, con una técnica muy rusa, haciendo un tarán, o colisión intencionada contra el objetivo.
Más recientemente se han publicado vídeos de drones ucranianos realizando taranes contra UAVs rusos, como el ZALA 421 o el Orlan-10.
De estos vídeos podemos deducir varias cosas. Una, que la forma de hacer la guerra está cambiando, y que se están enfrentando pilotos remotos con vehículos controlados a distancia y con cierto grado de automatización y autonomía en la toma de decisones, aunque más bien escaso, aunque las numerosas noticias que publicamos acerca de puntos fieles nos llevan a pensar que esto va a ser más la norma que la excepción en un futuro.
El sistema de combate futuro se ha definido siempre con capacidad de colaboración entre aeronaves tripuladas y no tripuladas, además de dotado de capacidad de intercambio de información entre todas las aeronaves que forman el sistema.
Obviamente, esto incluiría antes o después el llamado «punto fiel» —o loyal wingman en inglés—, un avión no tripulado de combate, capaz de volar en formación con otras aeronaves tripuladas y de colaborar con ellas de forma estrecha.
Einer der Stars auf der Berliner Luftfahrtmesse #ILA24 : #Wingman -Modell von @AirbusDefence als künftig unbemannter Begleiter für Eurofighter. Schautafel zeigt, wo die Waffen versteckt werden. Kann mit und ohne Seitenleitwerk fliegen. Bislang ist es nur ein Konzept.… pic.twitter.com/NFHytT4GiU
El concepto, cuya imagen mostramos al comienzo de este texto, ha sido bautizado como Wingman, será uno de los componenentes del equipo tripulado-no tripulado o MUM-T (Manned-Unmanned Teaming).
Wingman deberá volar en formación con los Eurofighter o con el NGF (New Generation Fighter), sea el que finalmente sea.
¿Recordáis haber volado algún simulador de vuelo de combate en el que cada piloto humano podía controlar una serie de puntos-IA dentro de su vuelo y darles órdenes para no exponerse tanto? Mandar a la IA a atacar un objetivo, a adelantarse a atacar a un avión enemigo detectado en el radar y así poder situarse ganando ventaja sobre el enemigo… pues Wingman (y, en general, el concepto de punto fiel) es precisamente eso.
Además también colaboraría con el resto de aeronaves, como el Eurodrone, Sirtap, A-400M… es decir, el incremento en las comunicaciones, ancho de banda, almacenamiento y gestión de información es considerable.
Otra aeronave con la que se espera que tenga que colaborar es con los que Airbus ha denominado «remote carrier», y que se podría traducir como «soportes subalares remotos». El concepto es similar a aquél en el que el TB-3 nodriza lanzaba dos I-16 parásitos armados con bombas para realizar el ataque. El remote carrier será un avión parásito, del tamaño de un misil de crucero, que portará a su vez otras armas, haciendo que la aeronave nodriza pueda repartir su poder ofensivo a distintos objetivos, incluso alejados entre sí.
En ILA, en Berlin, Airbus solo presentará una maqueta a escala 1:1.
Lo mostrado en Berlín es un avión del mismo tamaño que un Eurofighter, y se espera que su coste sea entorno a 1/4-1/3 del mismo. Además, según el propio stand de Airbus, el Wingman será modular y configurable:
Con dos superficies verticales en su empenaje cuando realice labores de ataque a tierra con cargas externas
Sin esas dos superficies verticales, para maximizar sus características furtivas cuando realiza misiones sin cargas externas (ISR, por ejemplo).
Originalmente irá motorizado con una variante de los motores EJ-200, los del Eurofighter, al que posiblemente se le elimine el post-quemador, pues esta aeronave vuela en subsónico alto, pero no llega a ser supersónica, aunque posteriormente se desarrollaría un motor específicos.
El lanzamiento de una aeronave similar por parte del consorcio europeo era ya esperado, pues eran básicamente los únicos que no estaban desarrollando —o al menos no de forma pública— una tecnología similar.
China y Rusia, obviamente, también están desarrollando «puntos fieles» no tripulados, siendo sus diseños más conocidos, posiblemente, el FH-97A chino o el Sukhoi S-70 Ojotnik del segundo.
Airbus presentará su nuevo concepto Wingman en la Feria Internacional de Aeroespacial ILA en Berlín. En la aviación militar, un «Wingman» es un piloto en otra aeronave que protege y apoya al líder de vuelo, ofrece más opciones tácticas y contribuye al éxito de la misión. En el concepto de Airbus, el Wingman opera de manera similar, pero no es un piloto ni un avión de combate. Es un dron de tipo caza comandado por un piloto en una aeronave de combate actual como el Eurofighter, capaz de asumir misiones de alto riesgo que representarían una amenaza para aeronaves tripuladas.
El modelo 1:1, que Airbus exhibirá del 5 al 9 de junio en ILA, es similar a un «coche de exhibición» utilizado en ejercicios de diseño en la industria automotriz. El modelo Wingman muestra capacidades anticipadas como baja observabilidad, integración de armamento, sensores avanzados, conectividad y soluciones de trabajo en equipo. Al igual que los coches de exhibición, no todo lo que se muestra puede llegar a la producción. El modelo en ILA Berlín será una base y un catalizador para diseñar cada generación del Wingman.
El Wingman está diseñado para mejorar las capacidades de las aeronaves de combate tripuladas actuales con plataformas no tripuladas que transportan armas y efectores. La Fuerza Aérea Alemana ha mostrado interés en una aeronave no tripulada que apoye a los aviones de combate tripulados antes de que el Sistema de Combate Aéreo del Futuro esté operativo en 2040.
Las tareas del Wingman incluyen reconocimiento, interferencia en objetivos y enfrentamiento de objetivos terrestres o aéreos con municiones o misiles de precisión. Los pilotos en aeronaves tripuladas mantienen el control de la misión como «combatientes comandantes» mientras se benefician de la protección y reducción de riesgos que ofrecen los sistemas no tripulados. El enfoque está en aumentar la masa de combate de manera asequible para igualar a las fuerzas oponentes en conflictos.
Así es como hoy día muchos llaman de forma un tanto despectiva a los controladores de los UAVs. Pero éste no es un titular de hoy en día, sino ¡de 1947!
El artículo apareció en el número de febrero de 1947 de Modern Mechanix:
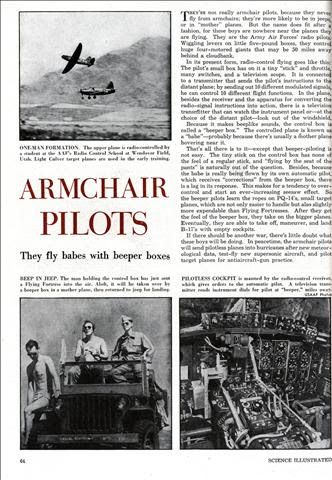
PILOTOS DE SILLÓN (Modern Mechanix, febrero de 1947)
Vuelan aviones con cajas que emiten pitidos. No son realmente pilotos de sillón, porque nunca vuelan desde sillones; es más probable que estén en jeeps o en aviones nodriza. Pero el nombre encaja, de alguna manera, porque estos muchachos nunca están cerca de los aviones que están volando. Son los pilotos por radio de las Fuerzas Aéreas del Ejército (USAAF(1)). Moviendo palancas en pequeñas cajas de cinco libras, controlan enormes, gigantes cuatrimotores que pueden estar a 50 millas de distancia detrás de un banco de nubes.
En su forma actual, el vuelo por radiocontrol es así: la pequeña caja del piloto tiene una pequeña «palanca» y un acelerador, muchos interruptores y un visor de televisión. Está conectado a un transmisor que envía las instrucciones del piloto al avión controlado de forma remota; enviando 10 señales moduladas diferentes, puede controlar 10 funciones de vuelo diferentes. En el avión, además del receptor y el aparato para convertir las instrucciones de la señal de radio en acción, hay un transmisor de televisión que puede mostrar el panel de instrumentos o, a elección del piloto remoto, mirar a través del parabrisas.
Debido a que emite sonidos parecidos a pitidos, la caja de control se llama “caja de pitidos”. El avión controlado se conoce como «bebé», probablemente porque generalmente hay un avión nodriza flotando cerca de él.
Eso es todo, excepto que el pilotaje remoto no es fácil. En el pequeño mando en la caja de control no se tiene la sensación que da un joystick normal, y «volar por las sensaciones en el culo» está naturalmente fuera de la ecuación. Además, debido a que el bebé realmente está siendo pilotado por su propio piloto automático, que recibe las «correcciones» de la caja de pitidos, hay un retraso en su respuesta (2). Esto genera una tendencia al sotre-control que hace que comience un movimiento de sube y baja cada vez mayor(3). Así que los pilotos remotos aprenden primero a manejarse en los PQ-14, pequeños aviones-blancos aéreo, que no solo son más fáciles de manejar sino también un poco más prescindibles que los B-17 Flying Fortresses. Después de familiarizarse con la caja de pitidos, toman el control de los aviones más grandes. Eventualmente, son capaces de despegar, maniobrar y aterrizar B-17 no tripulados.
Si hubiera otra guerra, no hay duda de lo que estos muchachos estarán haciendo. En tiempos de paz, los pilotos de salón enviarán aviones sin piloto a los huracanes para obtener nuevos datos meteorológicos, probarán nuevos aviones supersónicos y pilotarán aviones blanco para practicar con armas antiaéreas.
Notas
(1) Aeronautical Division, Signal Corps (1 agosto 1907 – 18 julio 1914); Aviation Section, Signal Corps (18 julio 1914 – 20 mayo 1918); Division of Military Aeronautics (20 mayo 1918 – 24 mayo 1918); U.S. Army Air Service (24 mayo 1918 – 2 julio 1926); U.S. Army Air Corps (2 julio 1926 – 20 junio 1941); U.S. Army Air Forces (20 junio 1941 – 18 septiembre 1947)
(2) Es un problema bien conocido, y cuanto más lejos está el avión controlado de forma remota, más retraso en recibir las órdenes, y con más antelación hay que preveer las acciones del avión.