El Harrier es un avión de despegue y aterrizaje vertical, aunque se ha usado más normalmente como aeronave de despegue corto y aterrizaje vertical, para aumentar su radio de acción. Esa versatilidad lo convirtió en un símbolo de innovación tecnológica y en un objeto de deseo para varias fuerzas aéreas del mundo, a pesar de ser subsónico en un mundo de cazas de Mach 2. Fue diseñado por Hawker Siddeley, y posteriormente perfeccionado por British Aerospace y McDonell Douglas.
Su bautizo de fuego llegó en 1982 durante la Guerra de las Malvinas, cuando operó con éxito desde los portaaviones HMS Invincible y HMS Hermes. Esa demostración le abrió puertas en el mercado internacional. India, que buscaba fortalecer su aviación naval, encargó 30 unidades y adquirió además el Hermes, rebautizado como INS Viraat. Los primeros tres Sea Harrier aterrizaron en Goa el 16 de diciembre de 1983, y días después realizaron pruebas en el portaaviones INS Vikrant.
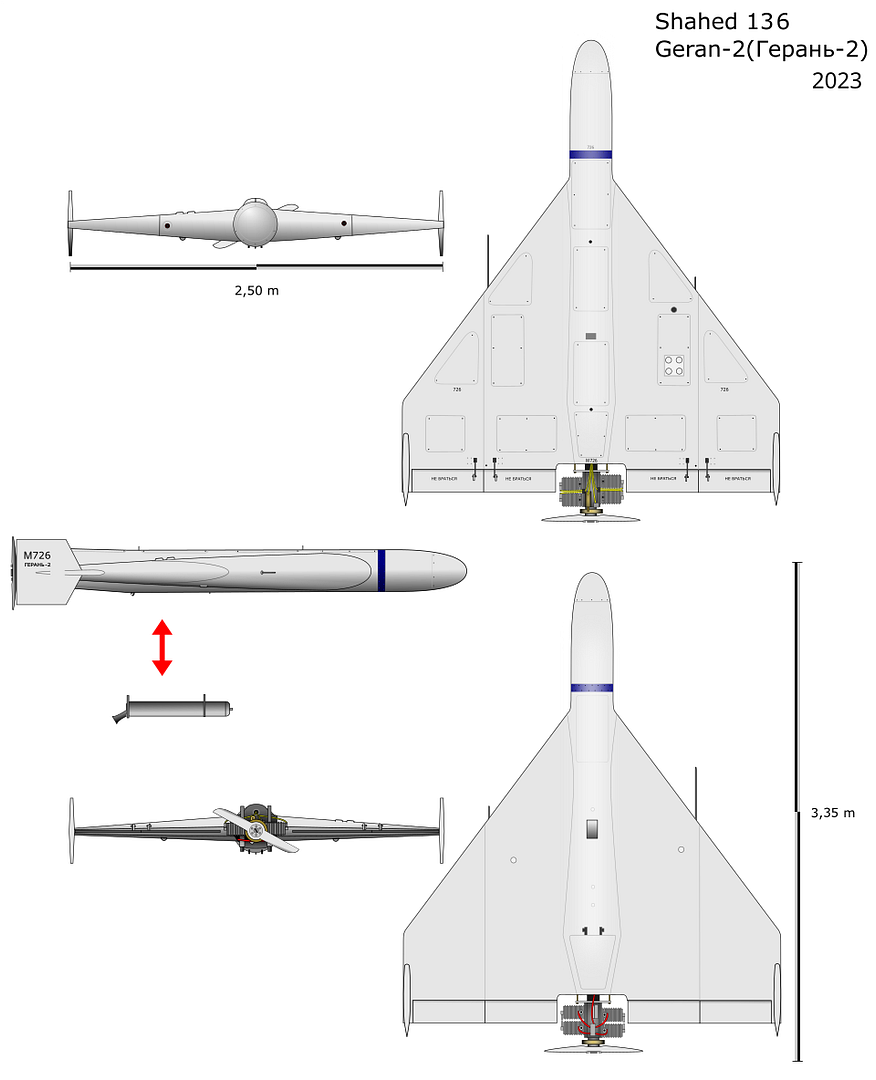
El Sahed 136 ha estado bajo el radar de los militares y analistas desde hace tiempo (de hecho fue conocido hasta 2019 como «Delta Wing» dentro de la comunidad de inteligencia), pero ha saltado al mundo de la prensa y público general a raíz de la guerra de Ucrania, y su uso (masivo) por parte de los rusos, en concreto del modelo de producción local Geran 2.
Se trata de un UAV kamikaze (llamados también munición merodeadora, drones de sólo ida…) de bajo costo y largo alcance, desarrollado originalmente por Irán con la intención primigenia de tener efectores validos para realizar ataques de negación plausible en toda la region de Oriente Proximo. Con una longitud de 3.5 metros y una envergadura de 2.5 metros, está diseñado para llevar una carga explosiva de 40 a 50kg (con diversidad de tipos de ojiva, desde las cargadas con metralla a las de carga hueca, pasando por —según algunos medios— cargas termobñaricas) hasta su objetivo, siguiendo una ruta pre-programada.
Está diseñado para ser lanzado en oleadas (que no en enjambre), en grandes cantidades, para realizar ataques de saturación, obligando a los defensores a consumir grandes recursos económicos en su interceptación: este tipo de ataques masivos no sólo tienen un sólo objetivo en tierra, sino que son eficaces a distintos niveles:
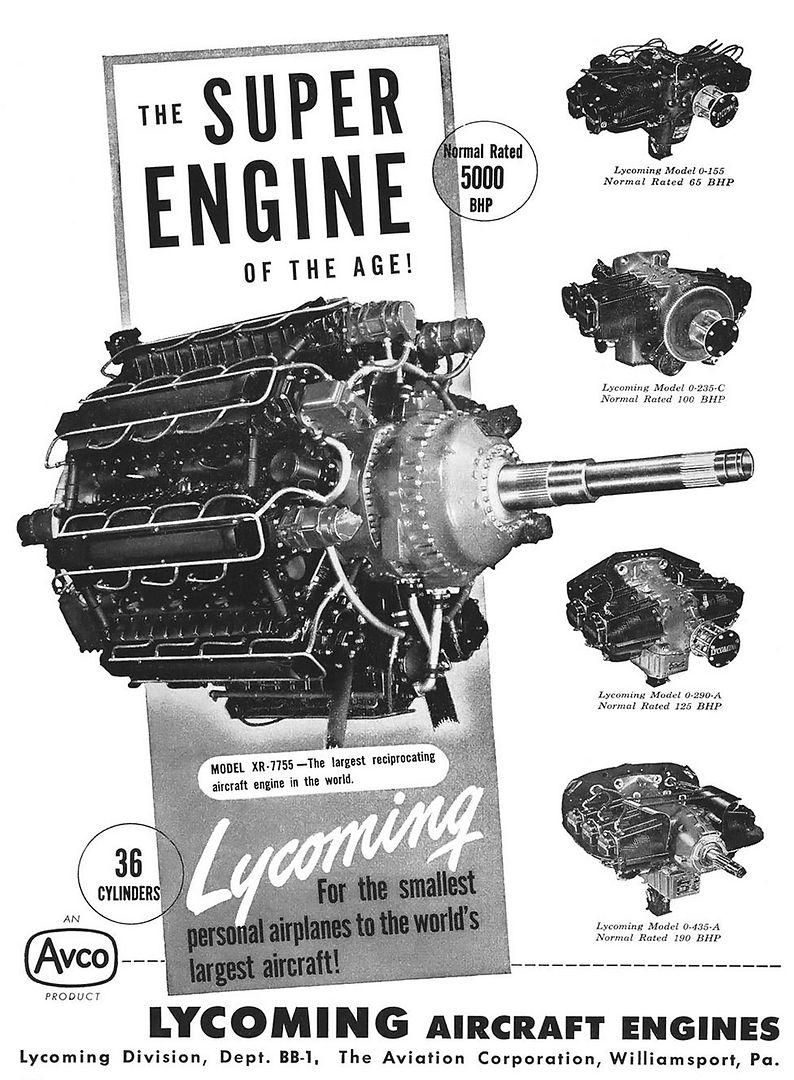
Lycoming es conocido por sus motores de cilindros opuestos que han montado y montan los principales aviones ligeros estadounidenses. Pero no querían quedarse motorizando aeronaves ligeras, e intentaron crear motores potentes para los aviones militares estadounidenses.
El Lycoming XR-7755 fue el motor alternativo de avión más grande y potente del mundo, al menos en el momento en el que fue construido. El XR-7755 fue la culminación de la experiencia de Lycoming en motores refrigerados por líquido. Concebido en 1943, estaba obsoleto cuando se puso en marcha por primera vez en 1946, la aparición de los turbo-hélices le había dejado fuera de juego: lograban la misma potencia con mucho menos peso y menos consumo, y con un combustible más barato. Pero tendría peor fortuna que el Pratt & Whitney R-4360 Wasp Major, la mazorca de maíz de 28 cilindros en cuatro estrellas, que al menos vio servicio en algunos aviones de aerolínea, hasta la llegada de los reactores.
Desde 1933, Lycoming había trabajado para crear un motor de alta potencia para las Fuerzas Armadas de Estados Unidos, nicho que estaba ocupado y cubierto por Wright con sus Cyclone y Pratt and Whitney con sus Wasp, en cuanto a motores radiales. Su primer intento fue el O-1230 de 1.200 hp (895 kW), de 12 cilindros boxer, que quedó obsoleto para cuando se probó por primera vez en 1940, superado por los Allison o Merlin. El segundo intento de Lycoming fue el XH-2470 de 2.300 hp (1.715 kW), de 24 cilindros en H, algo así como dos motores del modelo anterior con un cigüeñal entre ellos. El motor parecía prometedor, pero su rendimiento se había visto superado por otros motores cuando el XH-2470 voló por primera vez en 1943.
Así las cosas, Lycoming se propuso no quedarse obsoleto nunca más, diseñando un motor para las necesidades futuras, con el motor un potente que cualquier otro y que pudiera satisfacer las necesidades de potencia de cualquier aeronave del futuro.
A mediados de 1943, Lycoming entabló conversaciones con personal de la Fuerza Aérea del Ejército de Estados Unidos (AAF) en Wright Field, Ohio. Para diciembre de 1943, el diseño conceptual del motor se había concretado como un motor refrigerado por líquido de gran cubicaje y alta compresión diseñado para una economía de combustible óptima y destinado a propulsar la próxima generación de aeronaves muy grandes. El motor experimental de Lycoming fue designado XR-7755 y recibió el código de artefacto experimental MX-434.
XR-7755-3
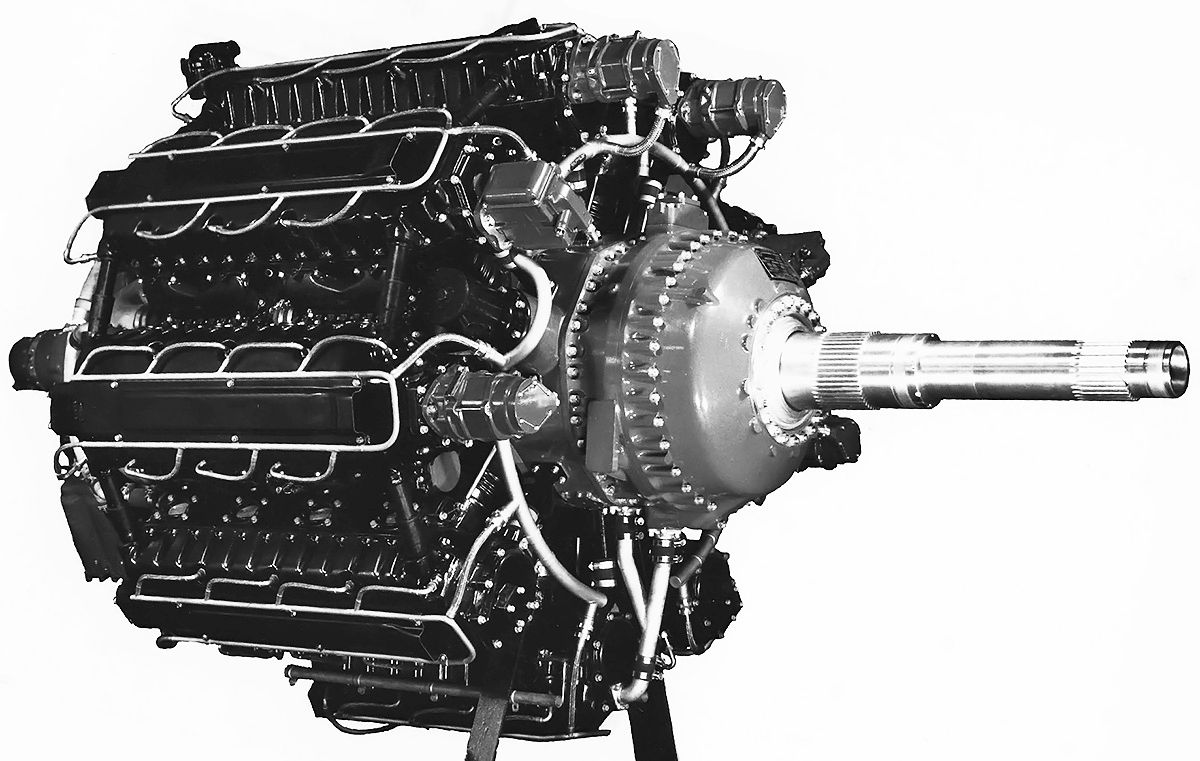
Clarence Wiegman encabezó el equipo de diseño. El motor parecía la unión de 9 motores de cuatro cilindros boxer Lycoming, como los usados en los aviones ligeros, posicionados radialmente con 40 grados de separación alrededor de un cigüeñal de acero forjado. Esto formaba un motor «radial» de 36 cilindros. El motor radial más grande consturido era de 4 estrellas y recibía el nombre de «mazorca de maíz» y tenía 28 cilindros.
Para optimizar el consumo de combustible, se diseñó con dos tipos de árboles de levas, cuyo uso podía alternarse en función de si se deseaba máxima potencia o potencia económica de crucero. Cuando se desplazaba el árbol de levas, el encendido de la bujía se cambiaba automáticamente. Cada uno de los 36 cilindros tenía una capacidad de algo más de 3.5 litros, esto hace un motor ¡de 127 litros!
El cigüeñal tenía cuatro muñones, cada uno espaciado a 180 grados. Y cada muñón estaba movido por una biela maestra, que a su vez recibía el movimiento de otras tres bieletas. En la parte trasera del motor había un sobrealimentador mecánico de una sola etapa y una sola velocidad, que era seis veces la del cigüeñal. El sobrealimentador suministraba aire a nueve colectores de admisión, cada uno conectado al lado derecho de un banco de cilindros. El combustible se suministraba al cilindro a través de un carburador. Cada cilindro tenía un escape individual, y se había previsto el hueco para que el motor pudiera incorporar turbo.
Como el motor eran 9 motores acoplados, se podía configurar de tal manera que movieran un solo eje o bien dos ejes contrarrotatorios. La configuración que se probó fue la primera, aunque se construyeron ambas, e incluso se habla de una tercera, con inyectores en lugar de carburadores.
El motor daba 5000hp al despegue, y una potencia máxima continua de 4000 para crucero. El motor tenía 1.5m de diámetro y pesaba 2744kg.
El XR-7755 se puso probó en banco por primera vez en julio de 1946. En ese momento, se habían completado unas 10.000 horas de pruebas con un solo cilindro. La fábrica de Lycoming estaba ubicada cerca de una zona residencial. Según se informa, los productos enlatados de una tienda de comestibles cercana vibraban en los estantes mientras el XR-7755 se sometía a pruebas de alta potencia. Lycoming, un buen vecino, ¡fue a la tienda e instaló tiras en los bordes de los estantes para evitar que las latas se cayeran!
A la potencia de despegue, el consumo de combustible fue de 580 galones (2196 L) por hora. La bomba de refrigerante del motor bombeaba tanto líquido que podía haber llenado un bidón de 208 L cada 4,4 segundos. La bomba de aceite bombeaba 270 l/min a 6,9 bares. Lycoming tenía una opinión optimista sobre el motor y creía que era posible una potencia de 7.000hp.
La mayoría de las fuentes indican que se construyeron dos motores XR-7755: un XR-7755-1 con un eje y un XR-7755-3 con dos ejes para hélices contrarrotatorias. Ambos motores usaban carburadores. Hay algunos indicios, incluidos los recuerdos de quienes tenían familiares involucrados en el proyecto, de que se construyó un tercer motor: un XR-7755-5 con inyección de combustible. Según se informa, el -1 se sometió a una prueba de 50 horas, pero se desconocen los resultados. El -3 se entregó a la AAF en 1946, pero es poco probable que este motor haya sido sometido a muchas pruebas. No está claro qué pasó con el -5, o incluso si se completó. Cuando el XR-7755 estuvo terminado, el concepto de un avión más grande que el Convair B-36 Peacemaker había caído en desgracia, al igual que la idea de modificar el B-36 con motores de pistón más grandes. El B-36 se actualizaría con varios turborreactores, pasando a la configuración conocida como «6 empujando y 4 soplando».
No había ninguna aplicación para el XR-7755 en un mundo de posguerra en el que el rendimiento de los aviones turborreactores a alta velocidad, y de los turbohélices a baja velocidad, había superado con mucho el de los motores de pistón.
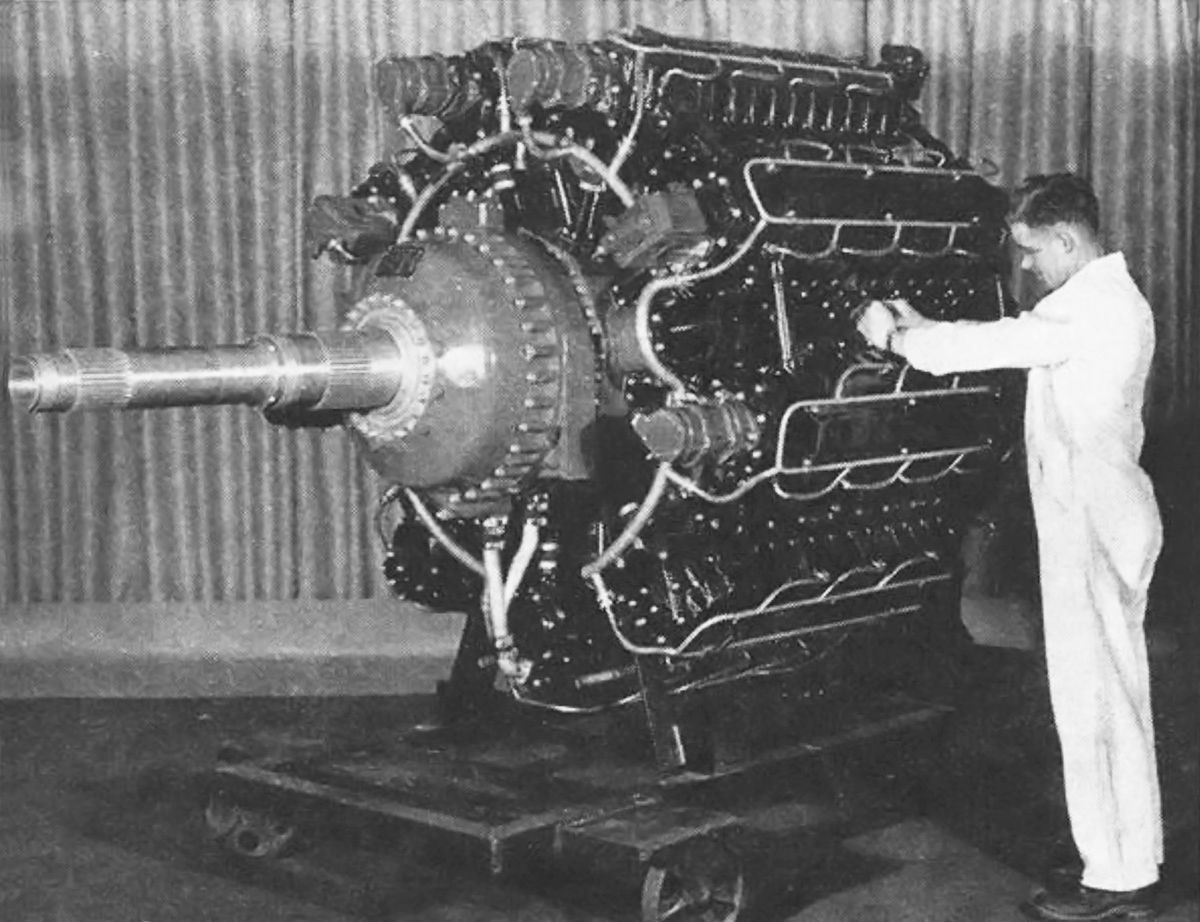
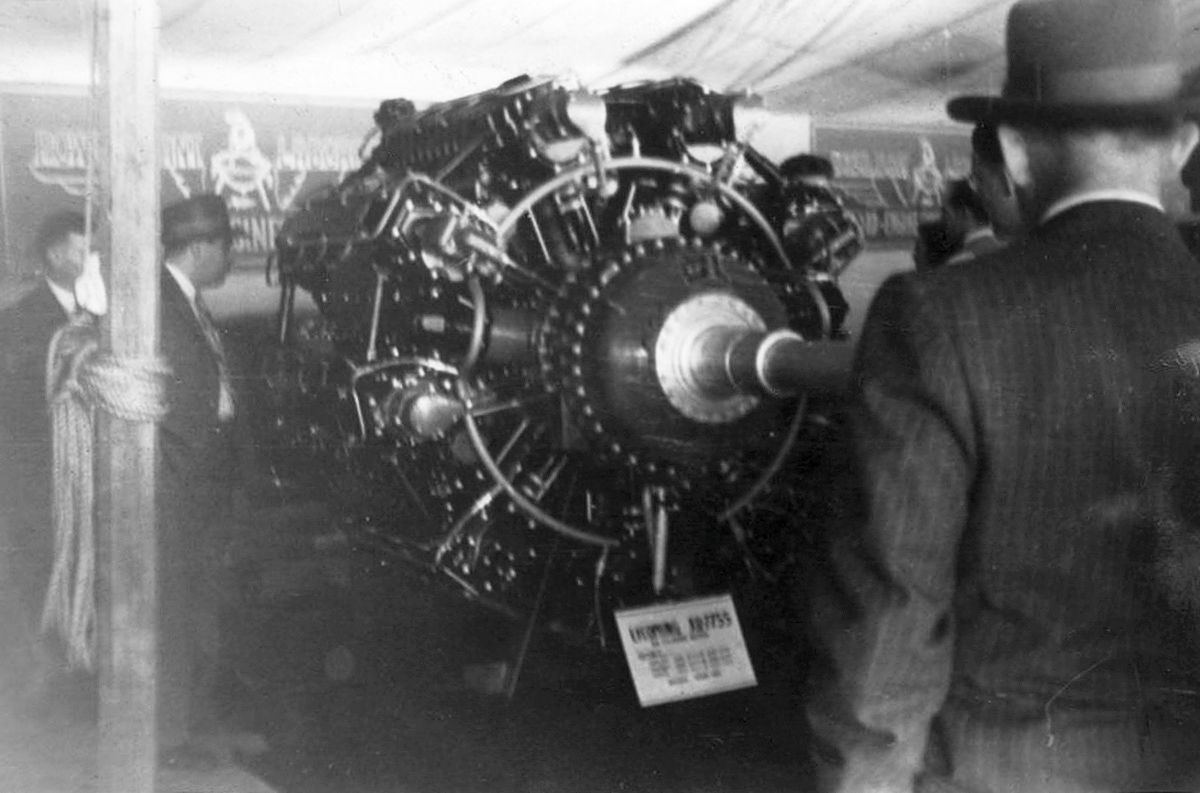
El motor, en la feria de la AAF
Una anomalía curiosa en la historia del XR-7755 es la aparición del motor en la Feria de las Fuerzas Aéreas del Ejército celebrada en Wright Field, Ohio, en octubre de 1945. Esto es anterior a la fecha de funcionamiento del motor y su supuesta entrega a la AAF. Sin embargo, el motor parece tener instalada una maqueta de sus ejes de hélice contrarrotativos. Parecería que el motor no está completo y fue enviado a 740 km desde la fábrica de Lycoming en Williamsport, Pensilvania, hasta Dayton, Ohio, para exhibirlo con otros tesoros inusuales de la guerra. Presumiblemente, el motor fue devuelto a Lycoming después de la exposición y posteriormente fue completado y probado en 1946.
Muchos consideran que el XR-7755 es el motor de avión más grande jamás construido, al menos en occidente, pues IAM M-44 soviético (8.107 pulgadas cúbicas / 132,8 L) de 1933 y el Yakovlev M-501 (8.760 pulgadas cúbicas / 143,6 L) de 1952 eran motores más grandes.
Es la segunda vez que os hablamos de estas gabarras remolcadas, portaaviones de poco más de 17m de largo, sin motor, desde las que despegaban Sopwith Camels. Pero entonces sólo encontramos algo de la historia del segundo piloto de pruebas. Y ahora hemos encontrado la historia completa, su uso operacional…
Con el final de la Segunda Guerra Mundial, el orden mundial previo cambió por completo. La mayoría de las viejas potencias coloniales europeas, irónicamente, habían sido invadidas y arruinadas. Y, claro, tras la guerra esos países querían que todo volviera a la normalidad previa al conflicto.
La derrota de Francia había sido de las más sorprendentes. En los años previos a la guerra, su ejército se planteaba como el más poderoso de Europa. Así que, tras el rápido colapso de su ejército ante la blitzkrieg alemana, y tras toda una guerra de partición en dos estados, uno ocupado y otro «independiente» y la pérdida de casi todas sus colonias, Francia tenía mucho «prestigio» que recuperar.
En el periodo inmediato de posguerra, y con el ejército destrozado y armado sólo con armamento de antes de la guerra y restos de armamento de otros ejércitos, como el caso de los Fw-190 renombrados NC.900, este deseo de recuperar el orgullo nacional y necesidad de rearme se vieron reflejados en el deseo de estar a la vanguardia del desarrollo de nuevas armas, en particular aviones.
La industria aeronáutica francesa renació rápido, en parte partiendo de diseños heredados de los alemanes, y ya producidos en Francia, como el caso del famoso Nord Pengouin, en parte con nuevos desarrollos, como el Gerfaut o el Griffon.
Francia se convirtió en el principal proveedor durante la Guerra Fría para aquellas naciones que no querían depender completamente de Estados Unidos o la Unión Soviética.
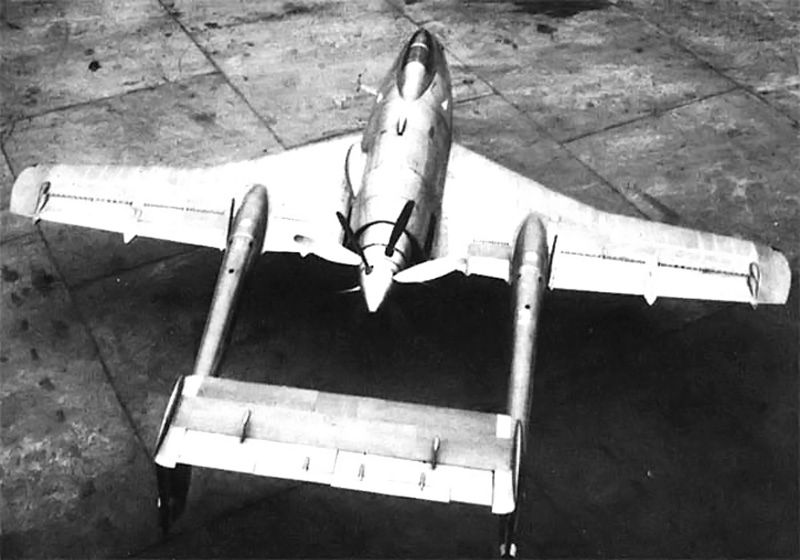
Sin embargo hoy no vamos a hablar de uno de eso grandes éxitos franceses, sino uno de esos exponentes de que la máxima de «si es bonito vuela bien» es falsa.
Se trata del SNCASO SO.8000 Narval, un avión naval de motor de pistón.