Durante la Segunda Guerra Mundial, los submarinos alemanes hundiendo tantos barcos mercantes y de combate y tan rápido que tuvieron que buscar un modo de protegerlos. Los aviones de patrulla marítima de la Luftwaffe también estaban muy activos.


De los blogs de aviación, uno de los decanos
Durante la Segunda Guerra Mundial, los submarinos alemanes hundiendo tantos barcos mercantes y de combate y tan rápido que tuvieron que buscar un modo de protegerlos. Los aviones de patrulla marítima de la Luftwaffe también estaban muy activos.

El Harrier es un avión de despegue y aterrizaje vertical, aunque se ha usado más normalmente como aeronave de despegue corto y aterrizaje vertical, para aumentar su radio de acción. Esa versatilidad lo convirtió en un símbolo de innovación tecnológica y en un objeto de deseo para varias fuerzas aéreas del mundo, a pesar de ser subsónico en un mundo de cazas de Mach 2. Fue diseñado por Hawker Siddeley, y posteriormente perfeccionado por British Aerospace y McDonell Douglas.
Su bautizo de fuego llegó en 1982 durante la Guerra de las Malvinas, cuando operó con éxito desde los portaaviones HMS Invincible y HMS Hermes. Esa demostración le abrió puertas en el mercado internacional. India, que buscaba fortalecer su aviación naval, encargó 30 unidades y adquirió además el Hermes, rebautizado como INS Viraat. Los primeros tres Sea Harrier aterrizaron en Goa el 16 de diciembre de 1983, y días después realizaron pruebas en el portaaviones INS Vikrant.

El Supermarine Type 224 «Spitfire» voló por primera vez en marzo de 1936. Noventa años después de su primer vuelo, una compañía británica —la Great British Supermarine Ltd— ha retomado un concepto de 1941, el Spitfire de material compuesto, y lo ha llevado a la práctica, y lo ha presentado el 16 de mayo en Boldmin, Cornualles.
Continuar leyendo «Aerolite Spitfire Type 433, un Spitfire de material compuesto por menos de 900k€»
Diseñado y construido como una iniciativa privada, el B.4, la empresa Auster intentó con esta peculiar arquitectura de aeronave crear una variante de carga de su robusta familia de aviones ligeros.
Continuar leyendo «Auster B.4, avión ligero de carga, feo, eficaz, pero sin éxito»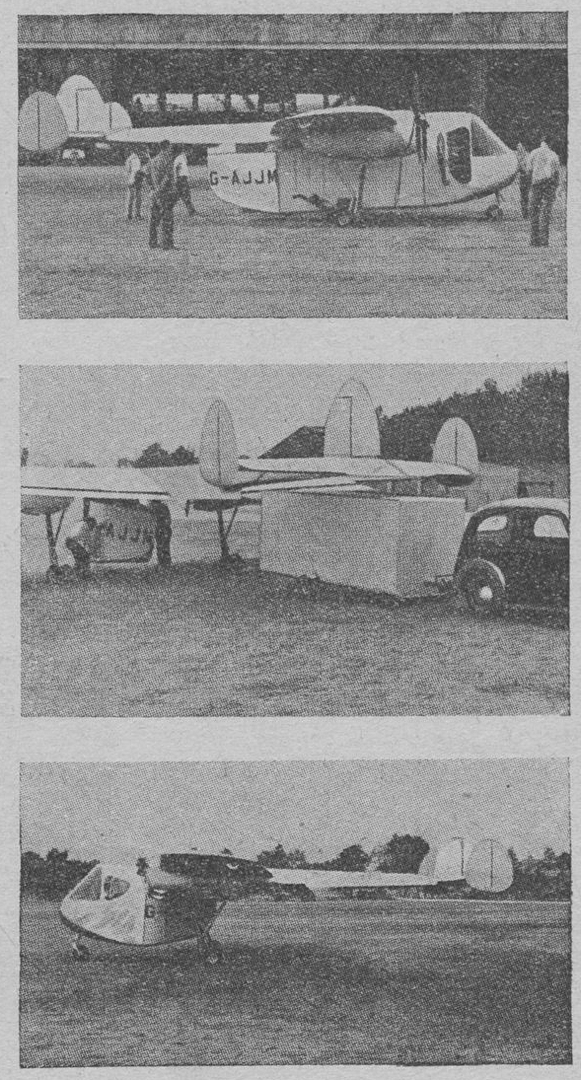
Las cabinas desmontables son viejas conocidas del blog. Básicamente la idea es siempre la misma: un contenedor que se pueda acoplar fácilmente a un avión y a un remolque, y que haga a su vez de fuselaje y de transporte por carretera. Minimizaría tiempos de carga y descarga y maximizaría el tiempo del avión volando, mejorando así la economía de operación.
Continuar leyendo «Miles M.68 Boxcar el mini-avión de carga británico con cabina desmontable»