Durante la Segunda Guerra Mundial, los submarinos alemanes hundiendo tantos barcos mercantes y de combate y tan rápido que tuvieron que buscar un modo de protegerlos. Los aviones de patrulla marítima de la Luftwaffe también estaban muy activos.


De los blogs de aviación, uno de los decanos
Durante la Segunda Guerra Mundial, los submarinos alemanes hundiendo tantos barcos mercantes y de combate y tan rápido que tuvieron que buscar un modo de protegerlos. Los aviones de patrulla marítima de la Luftwaffe también estaban muy activos.

Diseñado y construido como una iniciativa privada, el B.4, la empresa Auster intentó con esta peculiar arquitectura de aeronave crear una variante de carga de su robusta familia de aviones ligeros.
Continuar leyendo «Auster B.4, avión ligero de carga, feo, eficaz, pero sin éxito»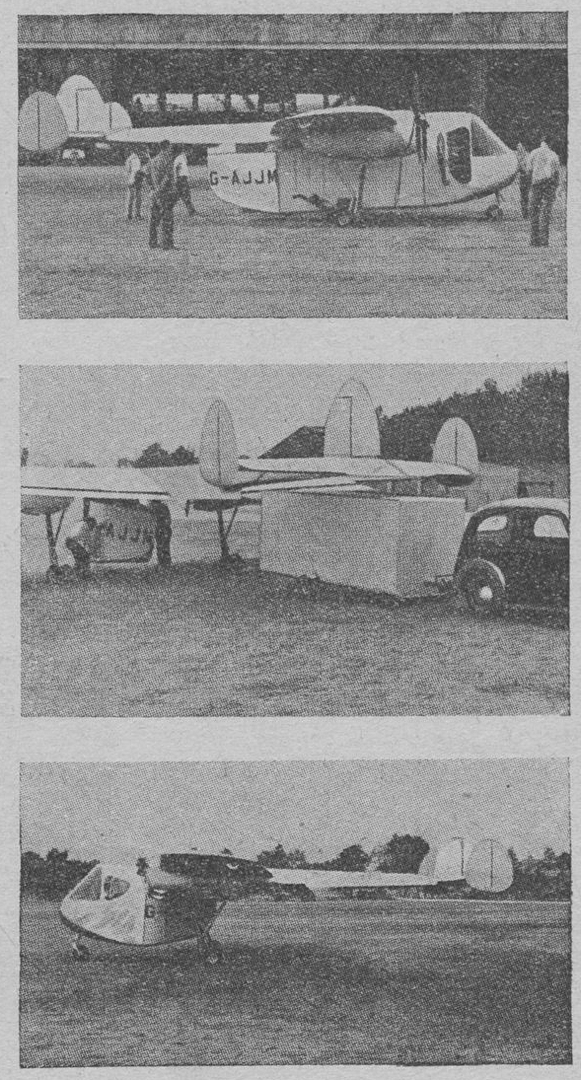
Las cabinas desmontables son viejas conocidas del blog. Básicamente la idea es siempre la misma: un contenedor que se pueda acoplar fácilmente a un avión y a un remolque, y que haga a su vez de fuselaje y de transporte por carretera. Minimizaría tiempos de carga y descarga y maximizaría el tiempo del avión volando, mejorando así la economía de operación.
Continuar leyendo «Miles M.68 Boxcar el mini-avión de carga británico con cabina desmontable»
Durante la Batalla de Inglaterra (10 de julio – 31 de octubre de 1940), la Royal Air Force (RAF) sufrió bajas considerables, perdiendo 1420 miembros: 520 en el Fighter Command, 700 en el Bomber Command y 200 en el Coastal Command. La organización benéfica Royal Air Force Benevolent Fund (RAFBF), una organización independiente establecida después de la Primera Guerra Mundial para apoyar a las víctimas de la RAF y sus familias, recibió apoyo de un fabricante de aeronaves ligeras en los Estados Unidos, Piper Aircraft Corporation de Lock Haven, Pennsylvania.
Continuar leyendo «Piper Flitfire, la J-3 Cub edición limitada para recaudar fondos para la RAF»
Hacía mucho que no escribía de autogiros, y que no os daba la lata con el libro que saqué por su centenario, así que aprovechando esta película de 1935 os voy a recordar que podéis encontrar el libro en Amazon.
Y de paso traeros esta espectacular película de época, de un AVRO 671 Rota o, lo que es lo mismo, un C-30 fabricado bajo licencia en Reino Unido, que si nos atenemos a la descripción del vídeo, es el primero que se construyó con flotadores y capacidad de despegar desde el agua.
Para 1934,el autogiro era una aeronave madura, ya tenía mando directo y era capaz de despegue al salto, y estaba siendo evaluada por todos los ejércitos que más tarde entrarían en combate durante la Segunda Guerra Mundial. La RAF pidió un pequeño número de C-30A para su evaluación en misiones de cooperación con el ejército. Sin embargo, al estallar la Segunda Guerra Mundial, habían sido asignados para su uso por una unidad altamente secreta dedicada a tareas de calibración de radares terrestres. En el 42 sería evaluado embarcado por la Navy.
El C-30A fue producido bajo licencia por Avro como el Avro Typeo 671 Rota, tanto para el mercado civil como militar.
La evaluación del modelo tuvo lugar en la Escuela de Cooperación del Ejército en la base RAF Old Sarum. No fueron adoptados por la Real Fuerza Aérea como aeronaves de observación o comunicación, pero el desarrollo del radar terrestre, y en particular la necesidad de una aeronave de vuelo lento para su calibración, hicieron que el Rota desempeñara un valioso papel durante la guerra.