Un día como hoy, cinco de marzo, pero de 1936 volaba por primera vez uno de los aviones que está considerado como de los más elegantes de la historia, el Spitfire. Así que en su 88 aniversario queremos contar una historia poco conocida: fue el primer avión en sufrir un retraso ¡de casi dos años! por los problemas surgidos de la subcontratación masiva y las cadenas de suministro.
Un cliente quejándose de los retrasos en la producción y la entrega del avión. Una compañía fabricante de aviones quejándose de la calidad de las entregas sus subcontratistas y de sus retrasos. Los subcontratistas quejándose de los plazos del fabricante, de la calidad de sus planos, y de los continuos cambios sin sentido pedidos. ¿Os suena familiar? Pues no se trata de una historia de Airbus ni de Boeing.
El B-50 Lucky Lady II siendo repostado en vuelo por un KB-29
El 2 de marzo de 1949, un día como hoy de hace 75 años, el BoeingB-50 ‘Lucky Lady II’, de la USAF, aterrizaba de regreso en la Base Aérea Carswell, en Fort Worth, Texas, después de más de 94 horas en el aire y de haber logrado el primer vuelo alrededor del mundo sin escalas. Recorrió 37742 kilómetros volando entre 10 y 20mil pies, a una velocidad media de 401 km/h.
Lucky Lady I
El 22 de julio de 1948, tres aeronaves B-29 del 43 Grupo de Bombardeo salieron de la Base Aérea Davis-Monthan, en Arizona, en una misión para circunnavegar el globo en solo catorce días. El Teniente Primero A.M. Neal era el piloto del Lucky Lady, el Teniente Coronel R.W. Kline era el comandante del segundo aparato, el Gas Gobbler. La tercera aeronave se perdería en un accidente sobre el Mar Arábigo. El Lucky Lady y el Gas Gobbler aterrizaron el 6 de agosto de 1948, un día más tarde del objetivo. Las dos aeronaves habían volado más de 20,000 millas en quince días, haciendo 8 escalas, y con un tiempo total de vuelo de 103 horas y 50 minutos.
Lucky Lady II
Menos de un año después, el Lucky Lady II, un B-50A (s/n 46-010) y catorce tripulantes, comandada por el Capitán James Gallagher, completaron el primer vuelo alrededor del mundo sin escalas, de 37742 km, en 94 horas y 1 minuto.
Despegaron de la Base de la Fuerza Aérea de Carswell, Texas, el 26 de febrero y aterrizó en la misma ubicación para completar su vuelo el 2 de marzo de 1949.
El 43 Escuadrón de Reabastecimiento Aéreo proporcionó los cisternas KB-29M para repostar la aeronave cuatro veces mientras estaba en vuelo a través de una técnica desarrollada inicialmente por los británicos: La aeronave cisterna volaba por encima y adelante de la aeronave receptora; la tripulación desplegaba una larga manguera de repostaje, desde su parte trasera, que se conectaba a una pértiga que desplegaba el avión receptor; una vez que la tripulación capturaba la manguera de combustible, la conectaban al colector de repostaje, realizaban el trasvase y liberaban la manguera para que la tripulación del avión cisterna la recuperara.
Por este destacado vuelo, la tripulación del Lucky Lady II recibió numerosos premios y condecoraciones. Entre las principales de estas distinciones se encontraban el premio Mackay Trophy, otorgado anualmente por la National Aeronautic Association al vuelo destacado del año, y el Trofeo Air Age, un premio de la Asociación de la Fuerza Aérea, entregado cada año en reconocimiento a las contribuciones significativas a la comprensión pública de la era del aire.
El éxito de la misión del Lucky Lady II demostró la capacidad de proyectar poder global a través del Mando Aéreo Estratégico de la USAF.
El vuelo más que un récord era una demostración de fuerza
Lo que hizo que el vuelo del Lucky Lady II fuera más que simplemente otro evento de establecimiento de récords fue el cuándo se realizó. El gran vuelo del B-50 demostró que la distancia y las barreras geográficas ya no ofrecían refugio frente al poder aéreo.
Considerando el clima político de finales de la década de 1940, la Segunda Guerra Mundial había terminado, pero la Guerra Fría estaba en sus albores. La URSS había bloqueado Berlín y los aviones aliados estaban en pleno e intenso puente aéreo. Mientras tanto, los soviéticos estaban reconstruyendo sus fuerzas y apretando su control sobre la mayor parte de Europa del Este.
La guerra había demostrado la eficacia del bombardeo estratégico, pero Estados Unidos había desechado gran parte de su arma aérea de guerra y desmovilizado a la mayoría de sus tropas. Aún contaba con un número sustancial de B-29, los aviones que habían bombardeado Japón. Sí, también fueron ellos los que lanzaron las bombas atómicas sobre Hiroshima y Nagasaki. Y se estaban empezando a recibir los primeros B-50, un B-29 mejorado.
En ese momento, además, Washington aún mantenía un monopolio de las bombas nucleares. Aún faltaban unos años para que los misiles balísticos intercontinentales con ojiva nuclear estuvieran listos, y se dependía de los bombarderos para transportar estas armas. Y, aunque el B-36 estaba en desarrollo, gran parte del mundo seguía estando más allá del alcance (sin reabastecimiento en vuelo) de cualquier aeronave basada en USA.
Nadie comprendía la importancia de la imagen mejor que el General de la Fuerza Aérea Curtis E. LeMay. Había asumido el mando del SAC (Strategic Air Command) en octubre de 1948 y había comenzado a reorganizarlo y reconstruirlo. Desde el principio, se dio cuenta de la importancia de mostrar las capacidades de SAC, tanto para disuadir la agresión soviética como para ganar el apoyo de un público estadounidense cansado de la guerra y reacio a realizar gasto militar en tiempos de paz.
Por eso, decidieron los líderes, que se necesitaba una demostración de fuerza para convencer a los soviéticos de que no era invulnerable a los bombarderos estadounidenses. Tales demostraciones también ayudarían a la Fuerza Aérea en casa. Con menos de dos años de existencia, el nuevo servicio aún luchaba por el reconocimiento público y aún competía con la US Navy por una parte de la misión estratégica.
Años después, habría una fuerza de bombardeos nucleares volando las 24h. Pero eso es otra historia.
Uno de los aviones acrobáticos más llamativos de las décadas de 1930 y 1940, basado en un avión de caza, el Grumman Gulfhawk II fue construido para el aviador naval retirado y piloto de espectáculos aéreos Al Williams. Como jefe del departamento de aviación de la Gulf Oil Company, Williams participó en espectáculos aéreos militares y civiles por todos los USA, realizando espectáculos aéreos donde combinaba la acrobacia con maniobras militares de combate, e incluso de bombardeo en picado, para promover la aviación militar durante los años de entreguerras.
El robusto biplano, con su fuerte fuselaje monocasco de aluminio y motor Wright Cyclone, estaba basado en el entonces caza estándar de la US Navy, Grumman F3F. Fue pintado como el anterior aparato acrobático del Williams, el Curtiss 1A Gulfhawk, otro acrobático basado en un caza anterior.
Construido por Grumman en Bethpage, Long Island, fue entregado en Roosevelt Field, Long Island, en diciembre de 1936, para ser utilizado por el Mayor Alfred «Al» Williams.
El Gulfhawk II estaba propulsado por un motor Wright Cyclone R-1820-GI de 1000 hp. Montaba una hélice Hamilton-Standard tripala. Las alas, de envergadura desigual y como las del F2F-1 anterior, estaban construidas con largueros y costillas de aluminio y revestidas de tela.
El fuselaje era de aluminio, monocasco. Con forma de tonel, albergaba la cabina, monoplaza, y uno de los primeros trenes retráctiles.
El avión fue reforzado, para soportar más «Gs» durante las acrobacias, y el motor se modificó para permitir al avión volar en invertido, sin que se parara el motor, durante hasta media hora.
Durante doce años, desde 1936 hasta 1948, el avión emocionó a muchos espectadores de los Estados Unidos y Europa. Fue la estrella en las carreras aéreas de Cleveland, el festival aéreo de Miami All-America, y la feria de Nueva York.
A Europa fue en 1938, visitó Inglaterra, Francia, Holanda y Alemania.
El Gulfhawk II también se utilizó como banco de ensayos. En 1937 se probó un nuevo laringófono y, durante la Segunda Guerra Mundial, el Gulfhawk II se utilizó para probar aceites, combustibles y lubricantes en condiciones de funcionamiento extremas.
Muchos cadetes de aviación vieron la aeronave durante su gira de tres meses por los campos de entrenamiento de vuelo en 1943. El comandante Williams hizo la gira a petición del general H. H. Arnold para demostrar la habilidad para el vuelo y el vuelo acrobático de precisión.
El 11 de octubre de 1948, el Gulfhawk II realizó su último vuelo. Williams llevó el avión al Aeropuerto Nacional de Washington, para exhibición aérea. Al finalizarla, se presentó al Smithsonian, donde puede verse ahora.
Un día como hoy, hace 120 años, se producía el primer vuelo de una aeronave más pesada que el aire, con motor, y que demostraba ser controlable: el primer avión práctico. Y nuestro amigo MartínGarcía nos ha regalado este texto para conmemorar esos 120 años de aviación.
Introducción
La aviación es una de las mayores hazañas de la humanidad. Desde que el hombre soñó con volar como las aves, ha habido muchos pioneros e inventores que han contribuido al desarrollo de esta ciencia y arte. Este mes la aviación cumple 120 años de gloriosa historia y en este artículo vamos a repasar algunos de los hitos más importantes de la historia de la aviación, desde el primer vuelo de los hermanos Wright hasta la actualidad.
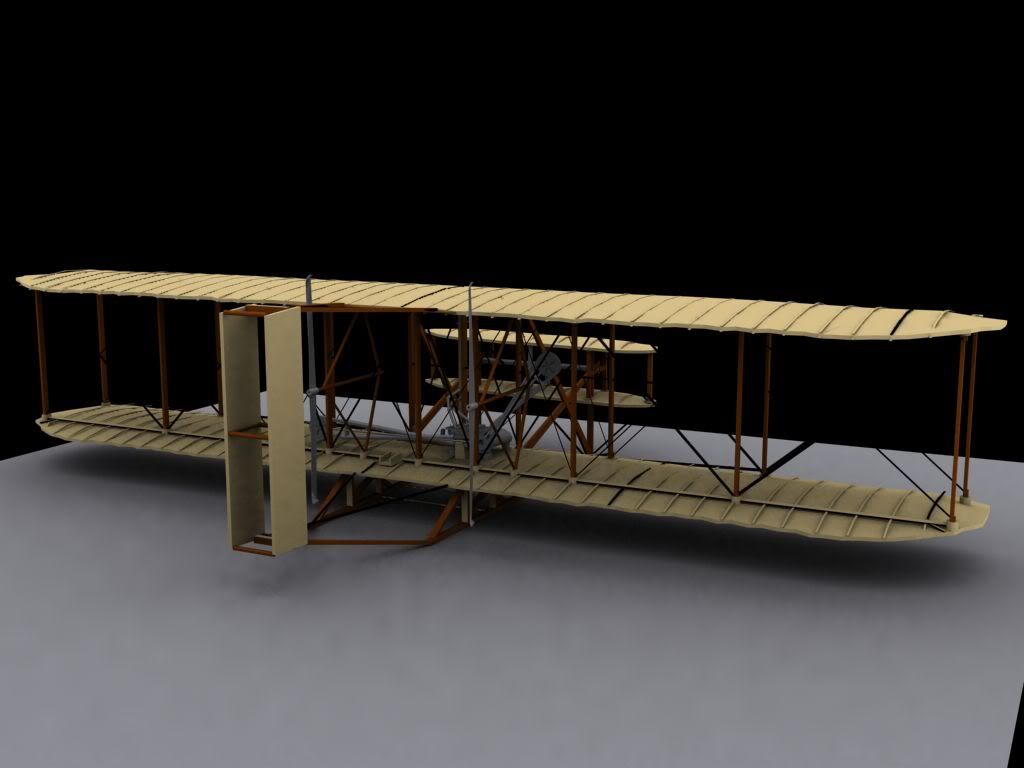
El primer vuelo: los hermanos Wright
El 17 de diciembre de 1903 en las colinas de Kill Devil Hills, Kitty Hawk en Carolina del Norte, los hermanos Wilbur y Orville Wright realizaron el primer vuelo de la historia en un avión controlado, el Flyer I. El aparato, impulsado por un motor de gasolina de 4 cilindros en línea que desarrollaba 12 caballos de potencia, recorrió una distancia de 37 metros en 12 segundos. Los hermanos Wright habían resuelto el problema del control del avión, mediante un sistema de alabeo, timón vertical y horizontal, que les permitía maniobrar en los tres ejes del espacio. Su hazaña se considera el inicio de la era de la aviación, aunque hubo otros pioneros que también volaron antes o después de ellos, como Alberto Santos Dumont, cuyo avión fue el primero en despegar por sus propios medios, Louis Blériot, primera persona en cruzar el Canal de la Mancha o Samuel Pierpoint Langley.
El primer vuelo transatlántico: Charles Lindbergh
El 21 de mayo de 1927, el aviador e ingeniero estadounidense Charles Lindbergh se convirtió en el primero en cruzar el océano Atlántico sin escalas, a bordo de su avión monomotor Ryan NYP apodado Spirit of St. Louis. Lindbergh despegó de Nueva York y aterrizó en París, tras 33 horas y 30 minutos de vuelo, recorriendo unos 5.800 kilómetros. Su hazaña le valió el premio Orteig de 25.000 dólares y le convirtió en un héroe nacional e internacional. Lindbergh demostró la viabilidad del transporte aéreo a larga distancia y abrió el camino para el desarrollo de la aviación comercial.
Primer avión a reacción:
El Heinkel He 178 fue el primer avión práctico del mundo propulsado con un motor a reacción. Voló por primera vez el 27 de Agosto 1939, pilotado por Erich Warsitz.
El primer avión a reacción conocido es el Coandã 1910 aunque este usaba un motor de pistón moviendo un compresor, conocido como termorraeactor.
Primera aeronave de la rotatoria exitosa: El Autogiro
Desarrollado por el ingeniero español Juan de la Cierva, este 2023 se ha cumplido el centenario de su primer vuelo.
Este especie de híbrido entre avión y helicóptero y precursor de estos, constituye uno de los mayores logros de la aviación española, con innovaciones como el rotor articulado que usan los helicópteros actuales.
Primer Helicóptero exitoso:
Este logro se lo disputan dos modelos, el Flettner 282 Kolibri y el Sikorsky R-4 que fue el primer helicóptero producido en masa.
El primer helicóptero producido en masa de uso civil fue el Bell 47.
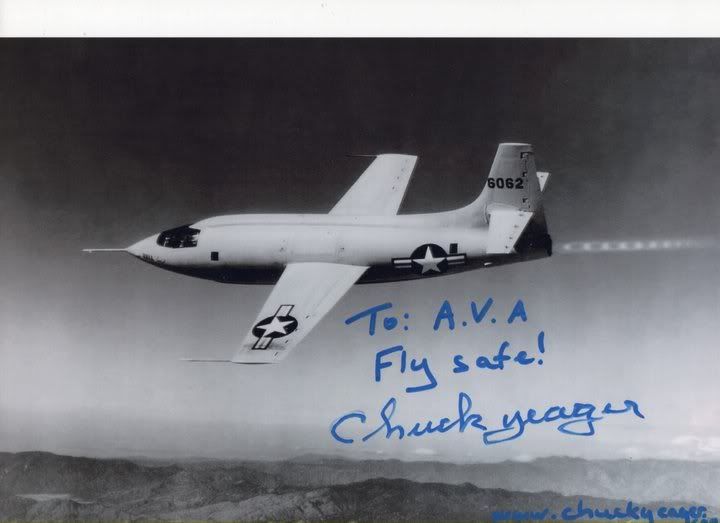
El primer vuelo supersónico: Chuck Yeager y el Bell X-1
El 14 de octubre de 1947, el piloto de pruebas estadounidense Chuck Yeager rompió la barrera del sonido, al alcanzar una velocidad de 1.127 km/h (Mach 1,06) en su avión experimental Bell X-1, apodado Glamorous Glennis, el cual fue lanzado desde un bombardero B-29, encendió su motor cohete y ascendió a una altura de 13.700 metros, acelerando hasta alcanzar Mach 1.06. Su logro fue un hito en la historia de la aeronáutica y abrió el camino para el desarrollo de los aeronaves supersónicas y espaciales.
Primer avión de Hidrógeno:
Este logro corresponde al Bee Project de los años 50 y consistía en Un Martin B-57B Canberra modificado para alimentar uno de sus motores con hidrógeno.
El hidrógeno en un depósito de punta de la estaba presurizado con helio.
Después de dos intentos fallidos, el 13 de Febrero de 1957 funcionó con éxito durante 20 minutos.
Bee Project era parte de un estudio mucho mayor en el que se consideraban otros combustibles, como el diborano.
El primer vuelo orbital: Yuri Gagarin
El 12 de abril de 1961, el cosmonauta soviético Yuri Gagarin se convirtió en el primer ser humano en viajar al espacio, a bordo de la nave Vostok 1. Gagarin orbitó alrededor de la Tierra una vez, en un vuelo de 108 minutos, a una altura máxima de 327 kilómetros. Su hazaña fue un triunfo para la Unión Soviética, que se adelantó a Estados Unidos en la carrera espacial, y un hito para la humanidad, que amplió sus horizontes más allá de la atmósfera terrestre. Gagarin se hizo famoso en todo el mundo y recibió el título de Héroe de la Unión Soviética.
Primer avión y helicóptero de propulsión humana:
El SUMPAC, de la universidad de Southampton voló por primera vez el 9 de Noviembre de 1961, cubriendo una distancia de aproximadamente 64 metros a 1.8 metros del suelo.
El primer helicóptero de propulsión humana fue el Altas de AeroVelo, que se hizo con el premio Sikorsky.
El primer vuelo comercial supersónico: Concorde
El 21 de enero de 1976, el avión supersónico Concorde realizó su primer vuelo comercial, uniendo Londres y París en menos de una hora. El Concorde, fruto de la colaboración entre Francia y Reino Unido, era capaz de volar a una velocidad de 2.179 km/h (Mach 2,04), más del doble de la velocidad del sonido, y a una altura de 18.300 metros. El Concorde revolucionó el transporte aéreo, al reducir el tiempo de vuelo entre Europa y América a la mitad, y se convirtió en un símbolo de lujo y prestigio. Sin embargo, su alto coste, su alto consumo de combustible, su ruido y su impacto ambiental limitaron su éxito comercial. El Concorde dejó de operar en 2003, tras 27 años de servicio.
Primer avión eléctrico tripulado:
El 21 de Octubre de 1973 voló el primer avión eléctrico tripulado de la historia, el MB-E1 (Militky-Brditschka Elektroflieger nº1.)
Era un motovelero Brditschka HB-3 con un motor eléctrico de 8 Kw, alimentado por baterías Varta que le daban una autonomía de 15 minutos, matrícula OE-9023.
El primer vuelo con energía solar y vuelta al mundo : Gossamer Penguin y Solar Impulse.
El 18 de Mayo de 1979 Volaba por primera vez el Gossamer Penguin, Primer avión propulsado por energía solar de la historia. Poseía un panel solar de 3920 células fotovoltaicas. Era un desarrollo del Gossamer Albatross, aeronave de propulsión humana que cruzó por primera vez el Canal de la Mancha.
El 3 de julio de 2015, el avión Solar Impulse completó el primer vuelo transoceánico propulsado únicamente por energía solar, al cruzar el océano Pacífico desde Japón hasta Hawái, en un vuelo de 117 horas y 52 minutos. El Solar Impulse, pilotado por el suizo André Borschberg, era un avión experimental que llevaba 17.000 células fotovoltaicas en sus alas, que le proporcionaban la energía necesaria para volar de día y de noche. El Solar Impulse formaba parte de un proyecto para dar la vuelta al mundo sin usar combustible fósil, con el objetivo de promover el uso de las energías renovables y la eficiencia energética. El proyecto se completó en 2016, tras 17 etapas y 23 días de vuelo efectivo.
El futuro de la aviación:
La aviación ha evolucionado mucho desde sus inicios, pero aún le queda mucho camino por recorrer. Los retos actuales y futuros de la aviación son mejorar la seguridad, la sostenibilidad, la eficiencia, la accesibilidad y la innovación de este medio de transporte. Algunas de las tendencias que se están desarrollando o se prevén para el futuro son:
– Los aviones eléctricos, e híbridos, o usando Combustibles sostenibles que reducen el consumo de combustible y las emisiones de gases de efecto invernadero.
– Los aviones hipersónicos, que pueden volar a velocidades superiores a Mach 5, acortando el tiempo de viaje entre continentes.
– Los aviones autónomos, que pueden volar sin piloto humano, mediante sistemas de inteligencia artificial y control remoto.
– Los aviones de despegue y aterrizaje vertical (VTOL), que pueden operar desde pistas cortas o helipuertos, facilitando la movilidad urbana y regional.
– Los aviones espaciales, que pueden salir y entrar de la atmósfera terrestre, abriendo la posibilidad del turismo espacial.
La aviación es una de las actividades humanas que más ha transformado el mundo, al conectar a las personas, las culturas y los mercados. La aviación seguirá siendo un motor de progreso y desarrollo, siempre que se haga de forma responsable y sostenible. La historia de la aviación no ha hecho más que empezar!
La idea de utilizar un bombardero pesado como caza fue relativamente recurrente, en especial durante los años 30 y 40. Posiblemente el caso más conocido es del del Boeing YB-40, un B-17 convertido en caza pesado de escolta. Sin embargo, resultó ser lento, pesado, y en cuanto lo dañaban quedaba totalmente rezagado de la formación de bombarderos.
También fueron convertidos bombarderos, como el Blenheim o el Ju-88 en cazas nocturnos durante la Segunda Guerra Mundial.
B-29 convertido en caza nocturno
Una idea similar fue la que se desarrolló con el Tupolev Tu-4, ya sabéis, el B-29 fabricado sin licencia en la URSS. Pero esta vez no como caza de escolta, sino como caza nocturno. Si exceptuamos el B-747 armado con láser para cazar misiles, el Tu-4P fue, posiblemente, el caza más grande del mundo.
El Tu-4 es un caso de ingeniería inversa, en la que la URSS produjo un bombardero completo a partir de los B-29 internados durante la Segunda Guerra Mundial. En marzo de 1953, la URSS entregó 10 de estos aviones a China.
En aquél momento los P2V de la China Nacionalista, Taiwan, estaban merodeando las costas de la República Popular China en incursiones nocturnas. Es por ello que cuando se modificó el Tupolev Tu-2 como caza nocturno, se propusiera también modificar el Tu-4.
Tu-4P en vuelo. Se aprecia un radomo adicional. Mayor Wang De’an, uno de los pilotos del caza
Las armas del B-29 ya iban apuntadas por radar. Y en el caso del Tu-4P se instaló un radar de puntería PSBN «Cobalt», con un alcance de detección de hasta 100km. Este tipo de radar se utilizó principalmente en el avión bombardero Il-28.
En los Tu-4P, el radar Cobalt se instaló en la torreta trasera del avión, y era necesario interconectar el radar y las miras ópticas. Para garantizar la operación nocturna, la mira óptica, los reflectores y las miras infrarrojas se instalaron en la cabina delantera. Con este tipo de equipo se podía detectar a los Venture a 3km.
Puesto de mando en la bodega de bombas
En las bahías de bombas del se instaló un puesto de mando aerotransportado, conectado al radar, con mesa para cartas de navegación y sistema de comunicaciones que permitía hablar con los pilotos en cabina y con tierra.
Cañones de 23mm montados por pares
El armamento consistía en 10 cañones de 23mm montados por parejas en las torretas giratorias.
En combate
El 19 de diciembre de 1960, tres oleadas de cazas nocturnos gigantes Tu-4P intentaron interceptar un P2V en vuelo nocturno sobre Zhangjiakou. El Tu-4P casi no necesitaba el control del radar terrestre, como los cazas más ligeros, ya que podían usar su propio radar Cobalt para encontrar el objetivo muy rápidamente. El director de tierra que guiaba al Tu-4P hasta que tenía al Venture al alcance de su radar, a partir de ahí el caza era autónomo, al contrario que los MiG-17 utilizados en este menester.
Una vez enganchado, el P2V no podía librarse facilmente de los cazas pesados. A su vez, los cazas pesados apenas podían hacer puntería de forma eficaz sobre el Venture debido a lo deficiente de sus equipos, ¡el error de las miras infrarrojas era de 2 grados!
Los Tu-4P llegaron a abrir fuego en varias ocasiones contra el P2V, pero sin derribarlo. El combate aéreo duraría 35 minutos, y finalmente el avión taiwanés escaparía indemne.