Los señuelos para engañar al enemigo son tan antiguos como las patrullas de reconocimiento, y cobraron más importancia —si cabe—, con la llegada de los aviones con capacidad de foto-reconocimiento.
Posiblemente las anécdotas más conocidas son:
la de los aviones de madera como señuelo, bombardeados en respuesta con una bomba de madera (que se sospecha que es una leyenda)
la de los tanques inflables y el ejército fantasma creado por los aliados para engañar a los alemanes sobre el lugar de desembarco del día D con la operación Fortitude.
Y recientemente han vuelto a saltar a la actualidad por algunas fotos publicadas con F-16 hinchables.
La primera que nos llegó fue la que se encuentra sobre estas líneas, con la indicación de que se había presentado en una feria de defensa como posible señuelo para los ucranianos.
Investigando un poco más, encontramos que el señuelo que se ha presentado con librea ucraniana es el de la foto inferior.
Pertenece a la empresa checa Inflatech decoy, y lo ha presentado en la feria de defensa DALO Industry Days. (Defense Acquisition and Logistics Organization=DALO)
Trods vejret er sæsonen for badedyr langt fra forbi…
Según Inflatech, sus señuelos son capaces de engañar visualmente al enemigo, pero además pueden emular las firmas térmicas y de radar. No solo fabrican aviones, también camiones, artillería, blindados… y algunos, además, pueden moverse por sus propios medios.
Inflatech, por cierto, fue noticia en marzo de 2023 cuando Rusia anunció haber destruido blindados italianos… hinchables.
La primera fotografía de esta entrada se corresponde con un señuelo de la empresa estadounidense I2K Defense. La empresa fabrica desde tiendas, hangares, refugios y ¡gimnasios! inflables a capsulas de aislamiento-cuarentena, pasando por los señuelos, tanto de vehículos de tierra como aéreos, como el F-16 con el que abrimos la entrada, o el F-15 y el F-22 bajo estas líneas.
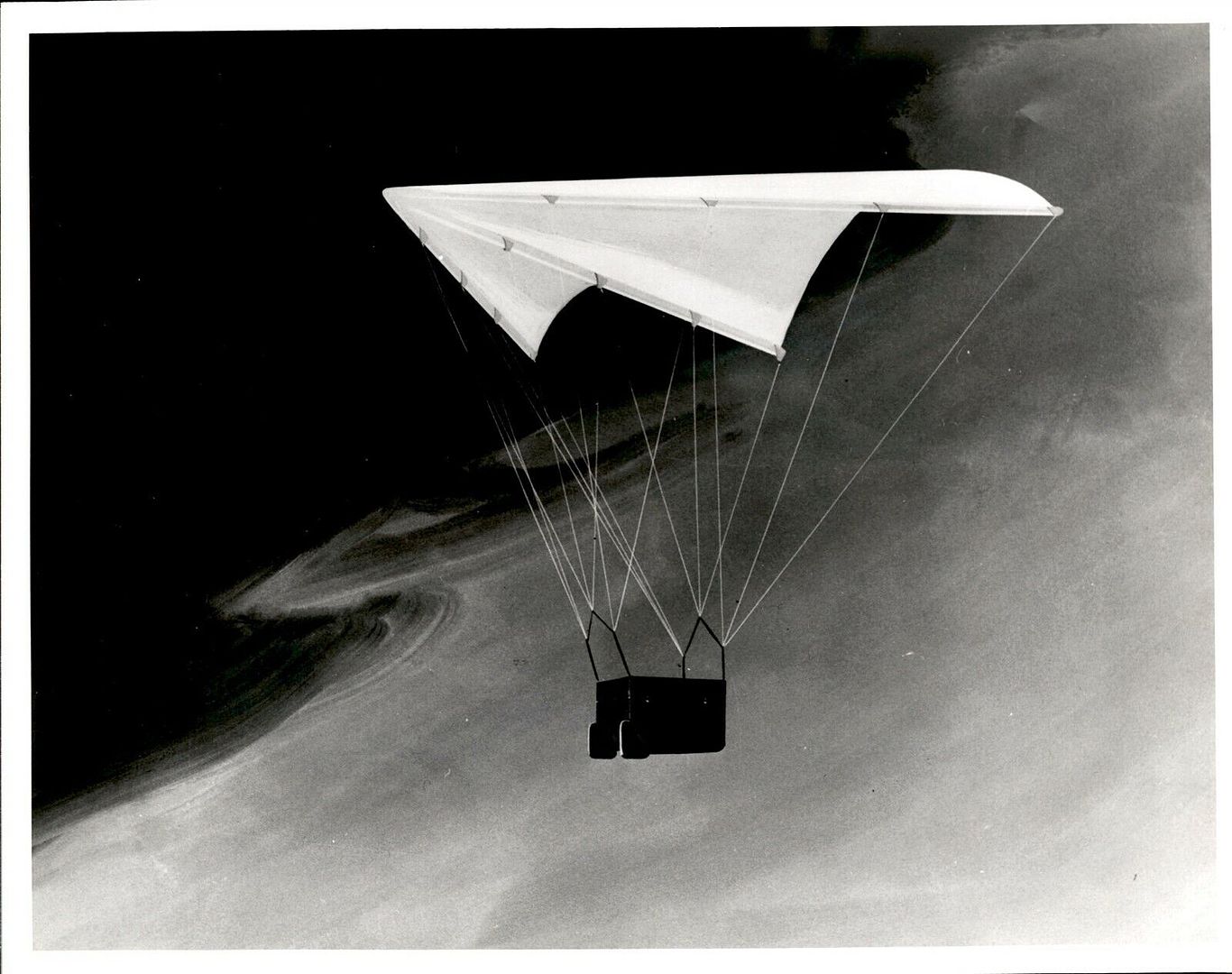
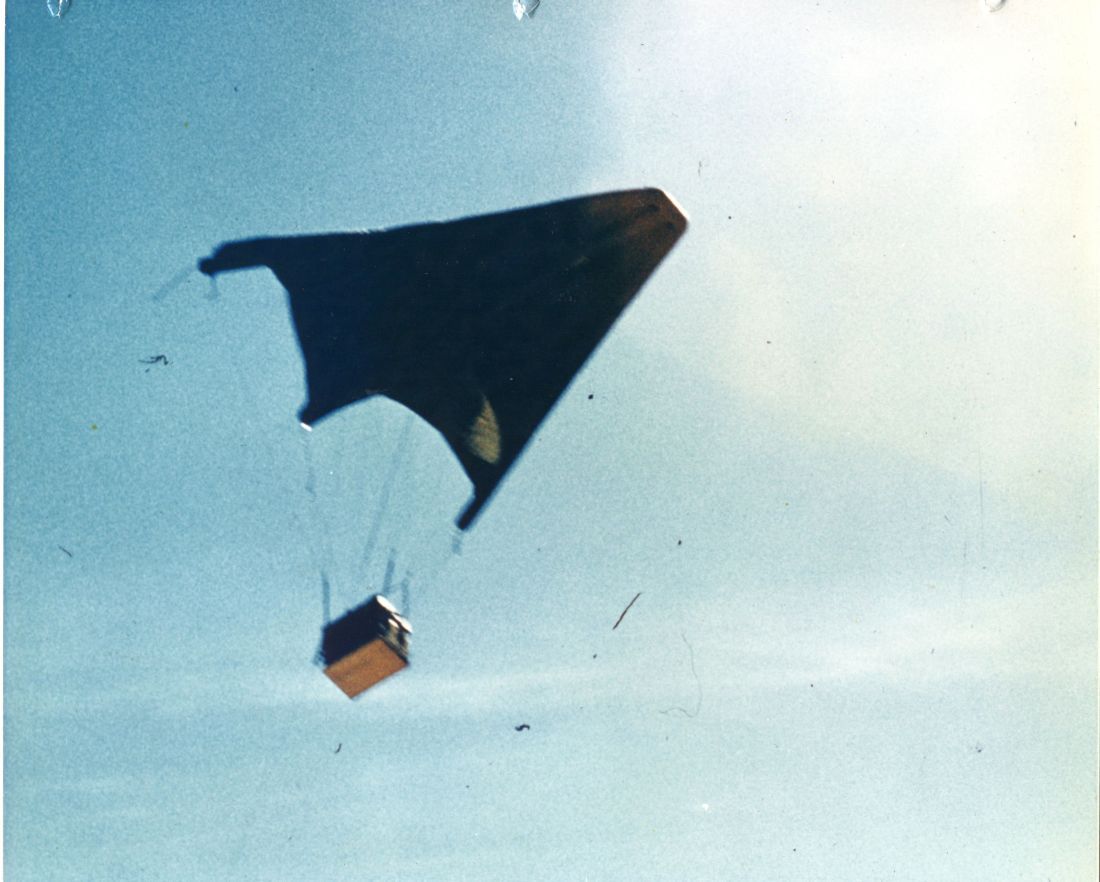
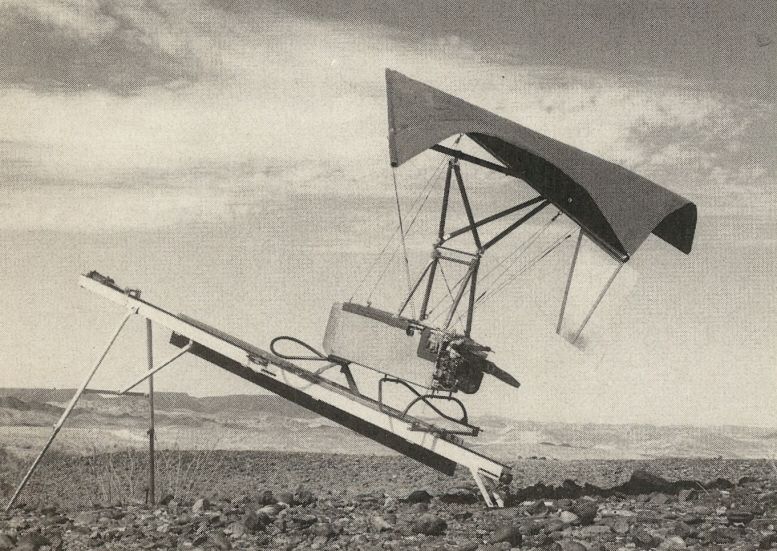
La entrega de suministros a unidades aisladas o sitiadas ha demostrado ser imprescindible en todos los conflictos. La Segunda Guerra Mundial introdujo la entrega por aire, con el lanzamiento en paracaídas de los suministros. Sin embargo la falta de precisión de estos envíos hacía que muchos se perdieran o incluso llegaran a manos equivocadas. Por ello se ha intentado realizar el lanzamiento de suministros en paracaídas teledirigidos. Éste es, posiblemente, uno de los intentos más antiguos, utilizando un ala Rogallo en lugar de un paracaídas.
El ala Rogallo es un tipo de ala flexible inventado en 1948 por Francis Rogallo, un ingeniero de la NASA, y su esposa Gertrude Rogallo, a la que llamaron Parawing, aunque suele ser conocida como «Ala Rogallo»
La NASA consideró utilizarla como un sistema de recuperación para las cápsulas Mercury y Gemini, aunque abandonó la idea en 1964 en favor de los paracaídas convencionales.
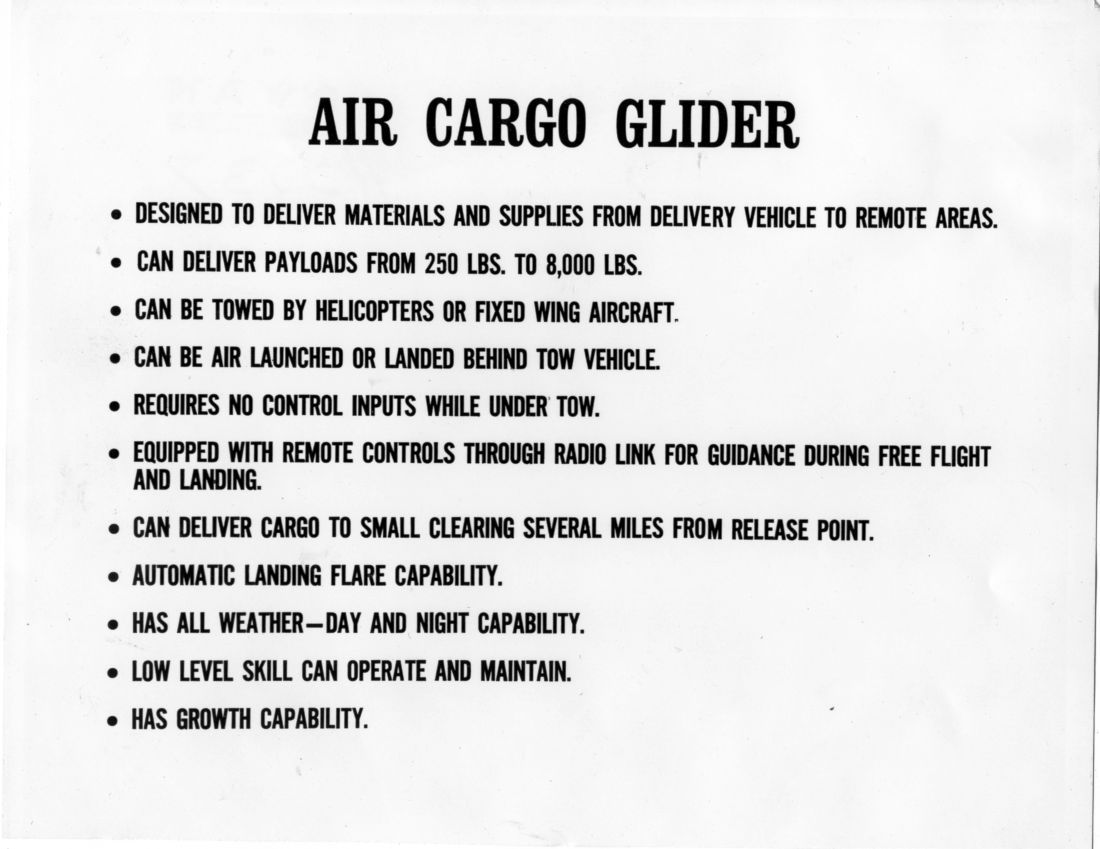
Ryan Aeronautical Company retomó la idea para realizar entregas de suministros con precisión, aunque éstos fueran lanzados desde un avión o un helicóptero.
Ala Rogallo teledirigida de Ryan remolcada por un helicóptero, vía Flickr
Podía funcionar de dos modos, bien remolcada por una aeronave, bien lanzada. En este caso, en una primera fase el ala funcionaría como un paracaídas, y una vez inflado actuaría como un planeador.
Todos los ensayos se realizaron en Yuma, Arizona, entre el 4 de octubre de 1962 y el 1 de marzo del año siguiente.
Los ensayos demostraron que se podían entregar con fiabilidad cargas que variaban entre las 100 y las 300 libras (de 50 a 150 kilos aprox). El radio de giro de planeador variaba entre los 200 y los 400 pies (de 30 a 60m), mientras que la tasa de planeo era similar a la de una piedra (2.8:1), con una velocidad vertical de entre 600 y 900 pies por minuto. La velocidad de vuelo era de 23 nudos (~40km/h).
Los ensayos de los vuelos planeados se realizaron a 95 nudos desde 9000ft sobre el terreno, que con la tasa de planeo de 2.8:1 le daba un alcance de unos 7.7km.
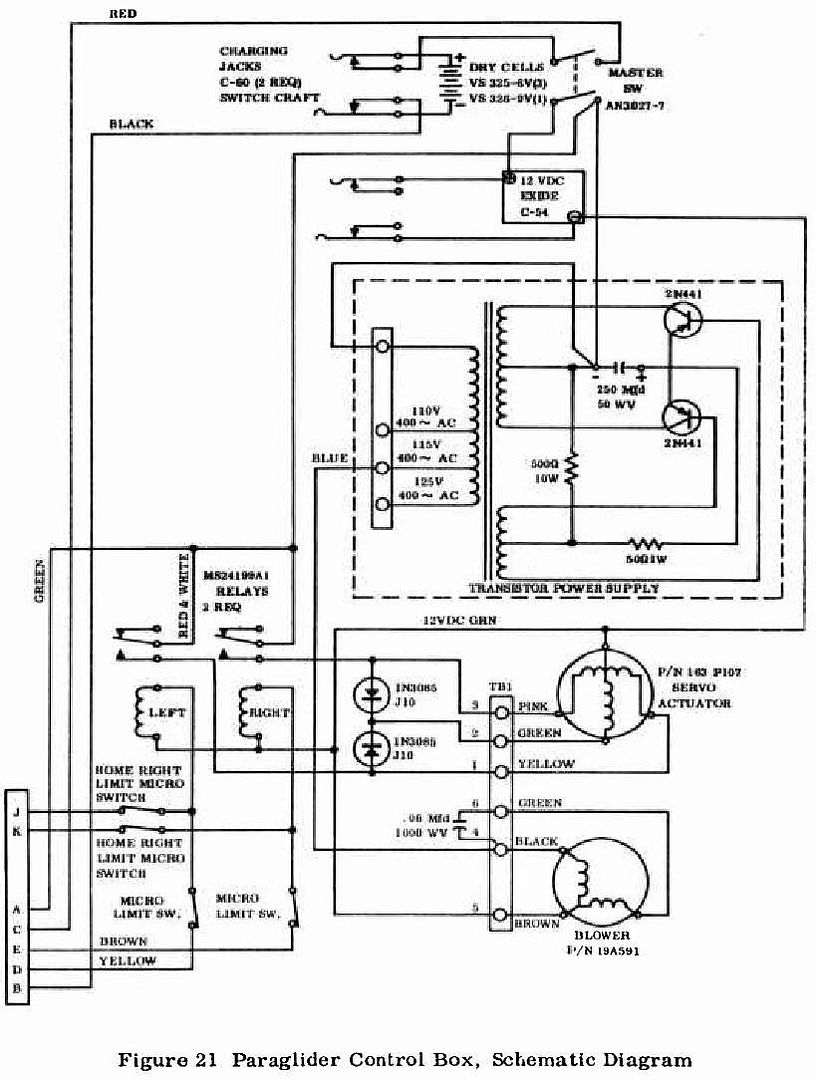
El control se conseguía gracias a un sistema de control remoto. El planeador llevaba dos compartimentos, uno con una batería de 28V y la antena, y otro con una batería de 12V y los servos.
Se realizaron 139 lanzamientos aéreos. En ellos se probaron distintas configuraciones de masas lanzadas, empaquetados y plegados del ala y distribuciones de las líneas que unían la carga útil y el ala. También se ensayaron distintos sistemas de control. En la primera treintena de lanzamientos se intentó utilizar el control por desplazamiento del centro de gravedad, sin éxito. Por ello se cambió el control a las líneas del ala flexible, como en los modernos parapentes.
Algunas de las configuraciones demostraron ser viables, aunque con esas tasas de caída hacían imprescindible el uso de amortiguadores de cartón para la carga.
Los ensayos operacionales se llevaron a cabo en Tailandia, de mayo a junio de 1963, de forma conjunta entre Ryan,ARPA, y los ejércitos estadounidense y tailandés.
En los ensayos operativos se pretendía demostrar la funcionalidad del sistema y su valía tanto para militares como para la policía y la patrulla de fronteras tailandesas, y su capacidad de operación en áreas remotas, así como las necesidades de formación y entrenamiento de personal para su uso.
El ala utilizada tenía un peso máximo al despegue de 386 libras, con una capacidad de carga de 300 libras. Fue lanzado desde distintos tipos de aeronaves, como C-47, Caribou, L-20 (DHC-2-Beaver), H-34 y UH-1.
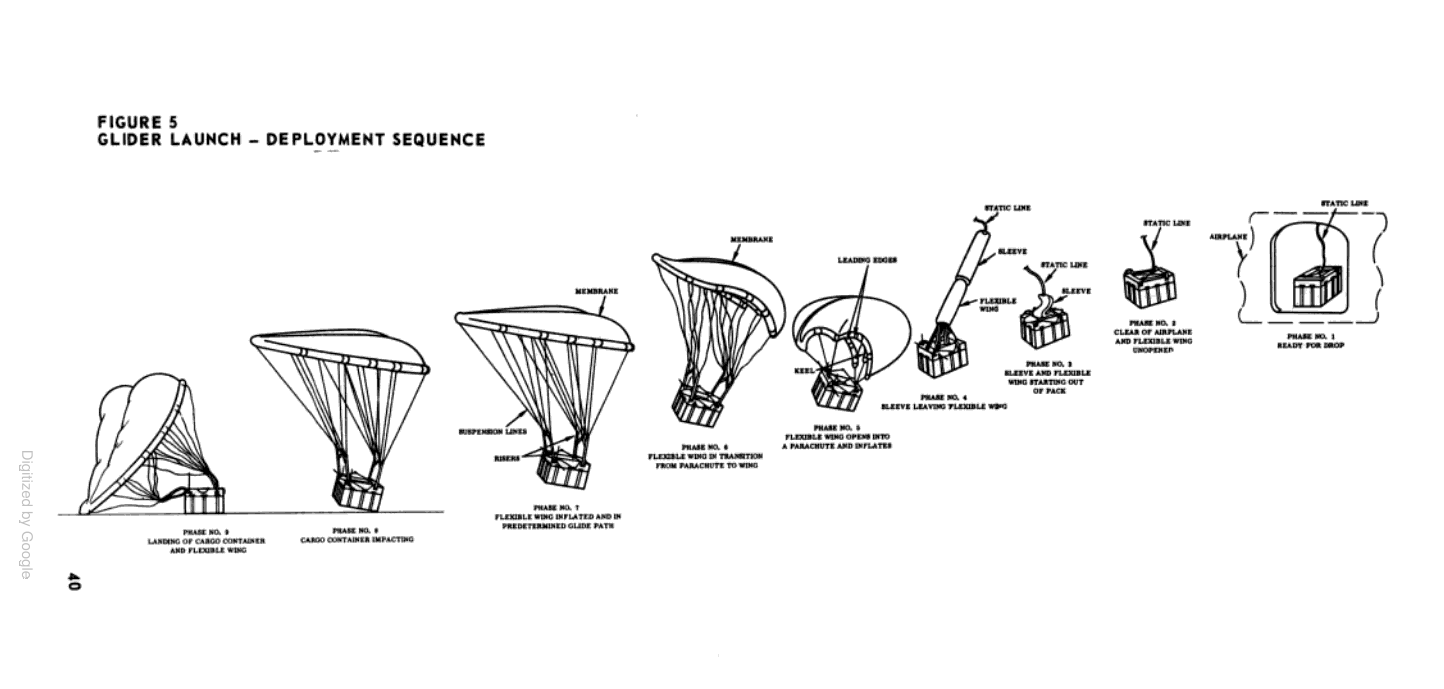
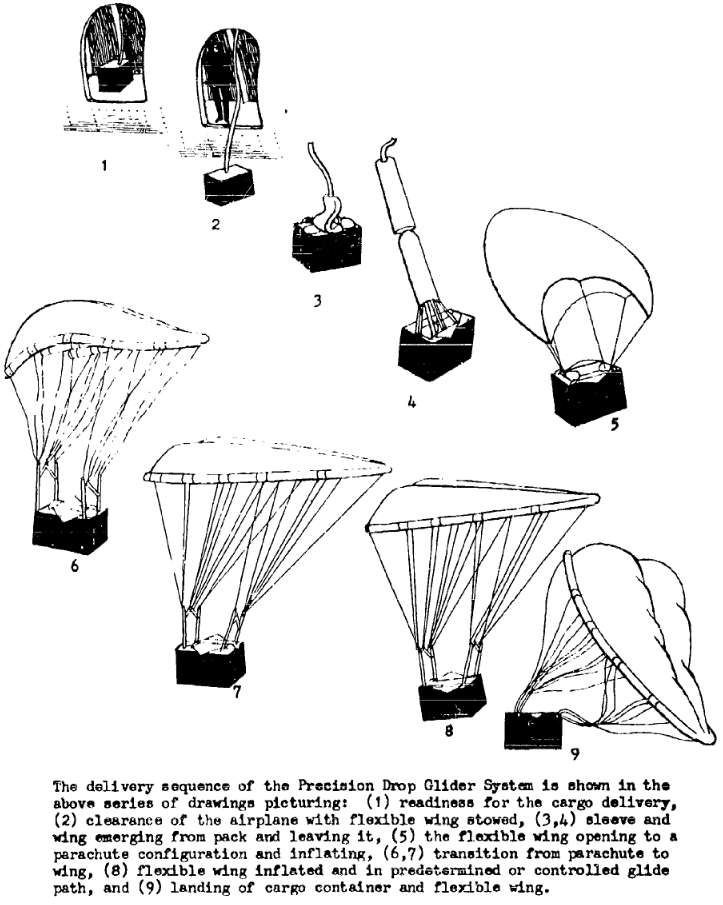
El sistema de lanzamiento era por el portón lateral, con un sistema de apertura automático, parecido al de los paracaídas: La vela del ala iba dentro de una manga, que a su vez se cogía a la línea de lanzamiento. Al lanzarse por la puerta la vela salía de la manga, que quedaba en la línea, y se desplegaba automáticamente. Este proceso llevaba unos 4 segundos, desde que se producía el lanzamiento hasta que la vela estaba inflada y con forma de ala.
En tierra, un controlador debía tomar el control del planeador para dirigirlo hacia la zona de recepción deseada. Podía hacerlo de dos formas, bien por control manual o bien por control automático. En éste último el operador en lugar de controlar la aeronave, monitorizaba un sistema que, una vez encendido, dirigía de forma automática el planeador hacia él, hasta que llegaba a su vertical, y entonces comenzaba un descenso en espiral. El planeador aterrizaba así, de forma autónoma, en un radio de 100ft (30m) al rededor de la antena. Se comprobó que durante el control manual ésta era también la forma más sencilla de recuperar el planeador, dirigiéndolo hacia la vertical del controlador y aplicando después controles totalmente a la derecha o a la izquierda, para descender describiendo una hélice. Además esta maniobra reducía el tiempo de entrenamiento del operador, así como el tiempo que quedaba expuesto potencialmente el planeador al fuego enemigo.
El transmisor tenía un alcance de 25 millas, si ningún obstáculo, como montañas, se interponía entre él y el paquete lanzado.
Los ensayos se realizaron en todo tipo de terreno, con lanzamientos desde 10000ft, entrenamientos en aeródromos, lanzamientos en zonas despejadas, pero también en zonas de alta montaña y muy boscosas. ¡En uno de los lanzamientos, los controladores de tierra fueron lanzados en paracaídas y tuvieron que caminar tres días hasta la zona de recepción! En el primer lanzamiento, el sistema falló y al equipo le llevó otros tres días localizar el ala, pintada de verde oliva, en la jungla. Por este motivo se suspendieron los lanzamientos en la jungla, hasta que se logró mejorar la fiabilidad del sistema.
Las investigaciones dedujeron que los fallos se habían producido durante el lanzamiento, tras sufrir daños en el lanzamiento desde la línea.
Se hicieron entregas de más de cien kilos de carga, amortiguada por el sistema de cartones, que se demostró muy eficaz.
Con la llegada de la estación de lluvias se comprobó que el sistema no era adecuado para funcionar en esas condiciones.
Las conclusiones de la policía fueron que aunque el sistema necesitaba mejorar en fiabilidad, su coste podría amortizarse en uno o dos lanzamientos, evitando además la pérdida de material lanzado en paracaídas convencionales. El ejército concluyó que el aumento de precisión en el punto de toma de la carga podía merecer la pena para operaciones nocturnas o lanzamientos en zona de montaña, además de operaciones militares donde la baja visibilidad del sistema, su silencioso funcionamiento y la posibilidad de operar de noche facilitaba la entrega de material a las unidades sin delatar su posición. Por supuesto, se juzgó como un buen sistema para re-aprovisionar a las patrullas que estaban desplegadas en la jungla del país.
Las conclusiones del informe estadounidense fueron positivas para el sistema, si exceptuamos que pedían una mejora de un 90% en la fiabilidad para considerarlo viable para un despliegue operativo.
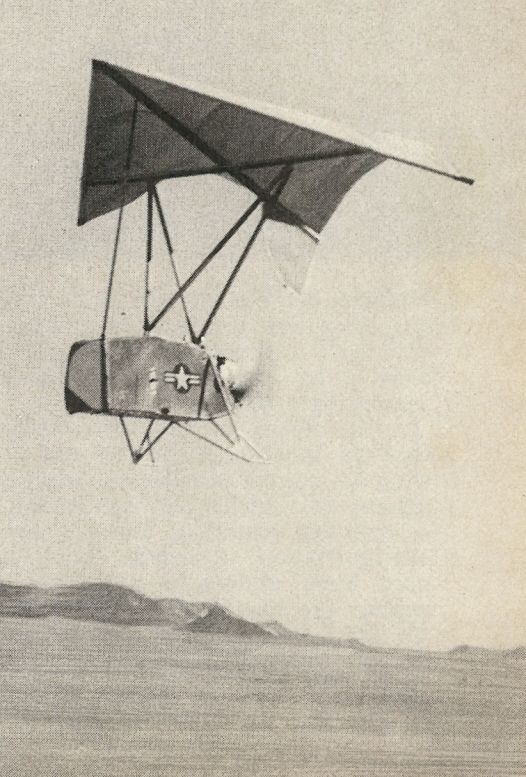
Nos consta que se realizaron otros ensayos en los que, además de ser dirigible, se le incorporaba una hélice, lo que permitía aumentar su alcance, así como aterrizajes más suaves.
En su lanzador con la hélice parada
En vuelo
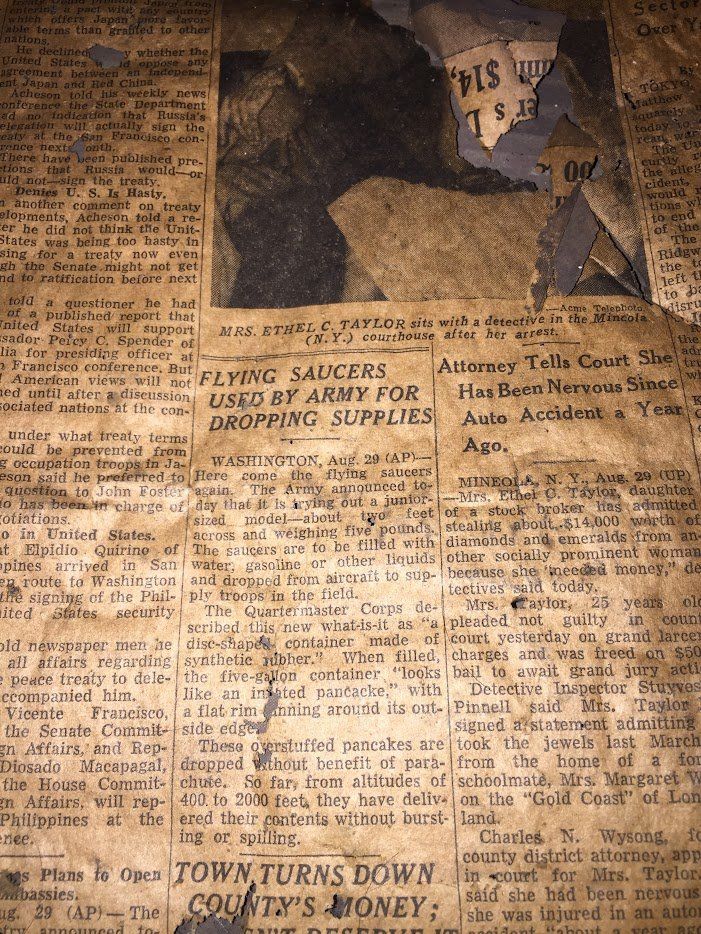
Gracias @MassiasThanos que me descubrió la historia y los pdfs, y al usuario @_ooo0OOOO0ooo_ que nos hizo llegar a Massiasy a mi un recorte del 29 de agosto de 1951 del St. Louis Post-Dispatch en el que se ve cómo el ejécito había intentado de otros modos mejorar la precisión de la entrega de las cargas aerotransportadas, en esta ocasión con unos discos volantes que hacían a su vez de contenedor de agua o gasolina, y prescindían del paracaídas.
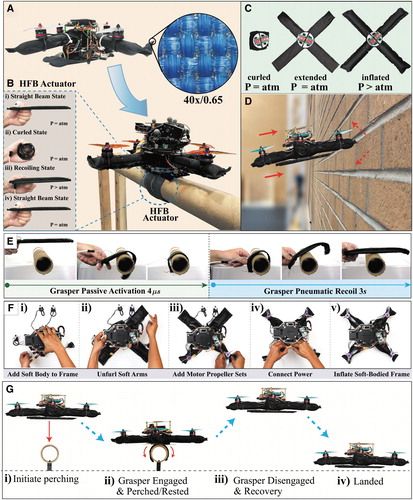
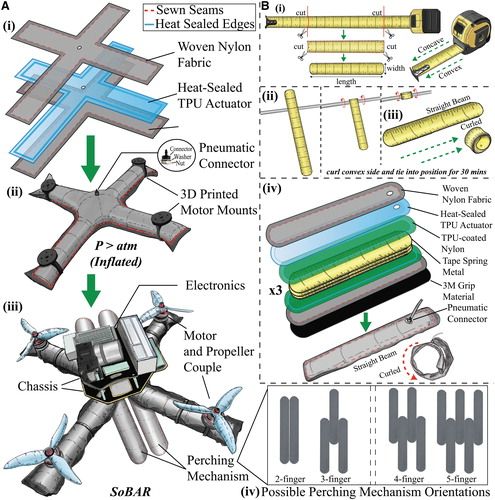
Las ventajas de la estructura inflable son claras: en especial su poco peso y que son fáciles de transportar por su poco volumen, mientras están desinfladas. Pero están limitadas en cuanto a carga máxima que pueden transportar y sus reacciones a cargas que las pueden hacer pandear en vuelo. Sin embargo, con drones de poco tamaño estos dos últimos inconvenientes no son tales, y les aportan más ventajas, tales como ser resistentes a choques con el entorno que les rodea y poder posarse virtualmente sobre cualquier superficie. Y éstas son las virtudes que defienden los investigadores.
La estructura del drone que mostramos en esta imagen y vídeo pesa apenas 10 gramos, frente a los 120 gramos del DJI F450, que sería comparable por tamaño y prestaciones.
Además del fuselaje cruciforme inflable, el drone cuenta con un «tren de aterrizaje» que es capaz de sujetarse a cualquier rama, tubo, barra… así que no sólo puede aterrizar en zonas preparadas, sino además agarrarse a superficies difíciles.
La facilidad de transporte, el poco peso, la resistencia ante colisiones con obstáculos que le rodean… lo hacen especialmente aptos para su uso en catástrofes humanitarias, dicen los investigadores que lo han desarrollado.
Por cierto, este drone es, al menos, el segundo que vuelve a las estructuras inflables. El más antiguo que recordamos es de hace 6 años, y lo conocimos por New Atlas.
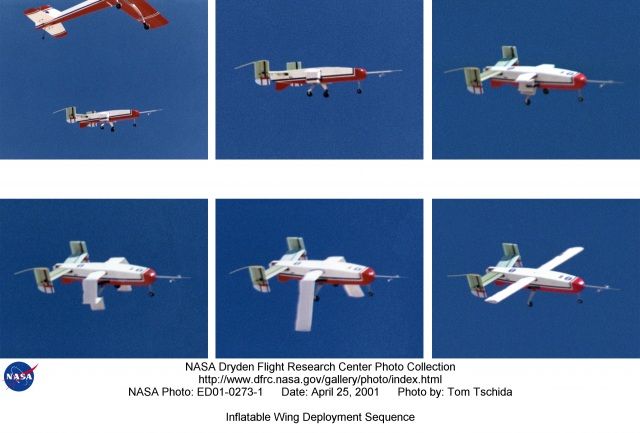
Bajo estas líneas podemos ver el ensayo del lanzamiento de un avión de radio control desde otra aeronave nodriza, y la secuencia de despliegue de las alas inflables. Son parte de unos ensayos que realizó la NASA para estudiar la viabilidad de las aeronaves con alas inflables y su posibilidad de utilizarlos en la atmósfera marciana, aunque al final mandaron un helicóptero.
Secuencia de desplegado de alas inflables
La teoría es simple: una avión ocupa mucho espacio. Es mucho más sencillo transportar el fuselaje por un lado y las alas por otro. Pero en Marte no hay nadie que lo ensamble. Podría recurrirse a un ala pivotante, pero los mecanismos añaden peso.
Ala en posición de almacenamiento y después de inflada
¿Y un ala inflable? Ocupa poco espacio y pesa mucho menos que un ala rígida. Y se ahorraban los sistemas de protección de la aeronave para hacerla llegar a tierra: podían lanzarla durante la caída de la sonda marciana, que desplegara las alas y aterrizara por sus medios.
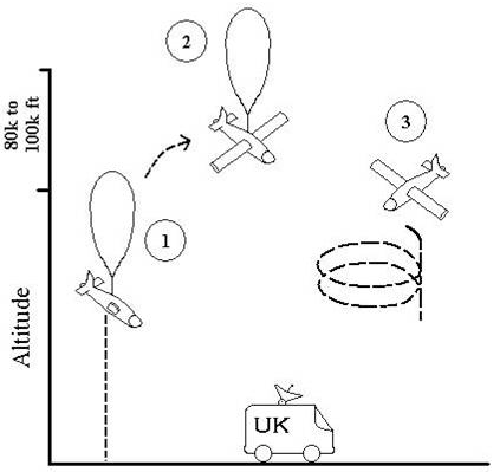
Obviamente en Marte no estaría esperando la televisión, es un esquema de los ensayos realizados en la Tierra con el BIG BLUE
Y para desarrollar este concepto nace BIG BLUE: Baseline Inflatable-wing Glider, Balloon-Launched Unmanned Experiment.
Secuencia de desplegado del prototipo de Langley
El BIG BLUE tenía que recoger la experiencia ganada por el avión radiocontrolado desarrollado en Langley, cuya secuencia de despliegue de las alas hemos visto antes.
Big Blue
En mayo de 2003 se realizaron las primeras pruebas. El avión era suspendido de un globo, que en el primer vuelo llegó a los 50000ft, y tras alcanzar la altitud deseada, era liberado. Tras ser liberado tenía que inflar sus alas y volver a tierra. La mayor altitud acanzada sería de 89600ft. Volvería a tierra en paracaídas.
Durante los ensayos no sólo se probaba el concepto de estructura inflable para las alas y su inflado en caída libre, sino también sistemas de comunicaciones, seguimiento por GPS y guiado.
Con el BIG BLUE II se probaron otros conceptos, como utilizar en las alas una resina que curaba bajo el efecto de los rayos ultravioleta, mejorando así la estabilidad estructural de las mismas e impidiendo el pandeo. Se ensayó en vuelo en mayo de 2004, realizándose el despliegue del ala y el curado del mismo. Debido a las restricciones impuestas por la FAA el avión no tripulado se ensayó siempre dentro del alcance visual del operador, por debajo de 1600-3280ft AGL, La recuperación se hizo mediante paracaídas.
Ambos aviones se desplazaron a Colorado, para continuar con los ensayos a gran altitud con menos restricciones.
Un total de 110 estudiantes estuvieron involucrados en el desarrollo de ambas aeronaves, así como sus sistemas de comunicaciones, guiado y control, telemetría… y lo último que encontramos es que la siguiente fase, BIG BLUE III estaba a la espera de recibir fondos.
El Inflatoplane es un viejo conocido del blog, y no es la primera vez, y sospecho que tampoco será la última, que hablamos de aviones inflables. Así que sólo recordaremos que pretendía ser un medio de autorrescate, que se pudiera lanzar como quien lanza una balsa al mar, y que el piloto lo inflara usando el propio motor como compresor, y después saliera volando.
Y, sin más dilación, os dejamos con sendos vídeos, uno en el que se explican los materiales empleados para su fabricación, los ensayos aerodinámicos realizados en tierra, utilizando un coche para mover el avión en lugar de metelo en un túnel de viento, y en el que, finalmente, se le ve en acción.
Y el otro en el que se realizan los ensayos de pandeo de las estructuras inflables.
Ensayos de pandeo de una estructura inflable
Gracias @MassiasThanos por ponerme sobre la pista de los vídeos.







_17-Figure1.1-1.png)