
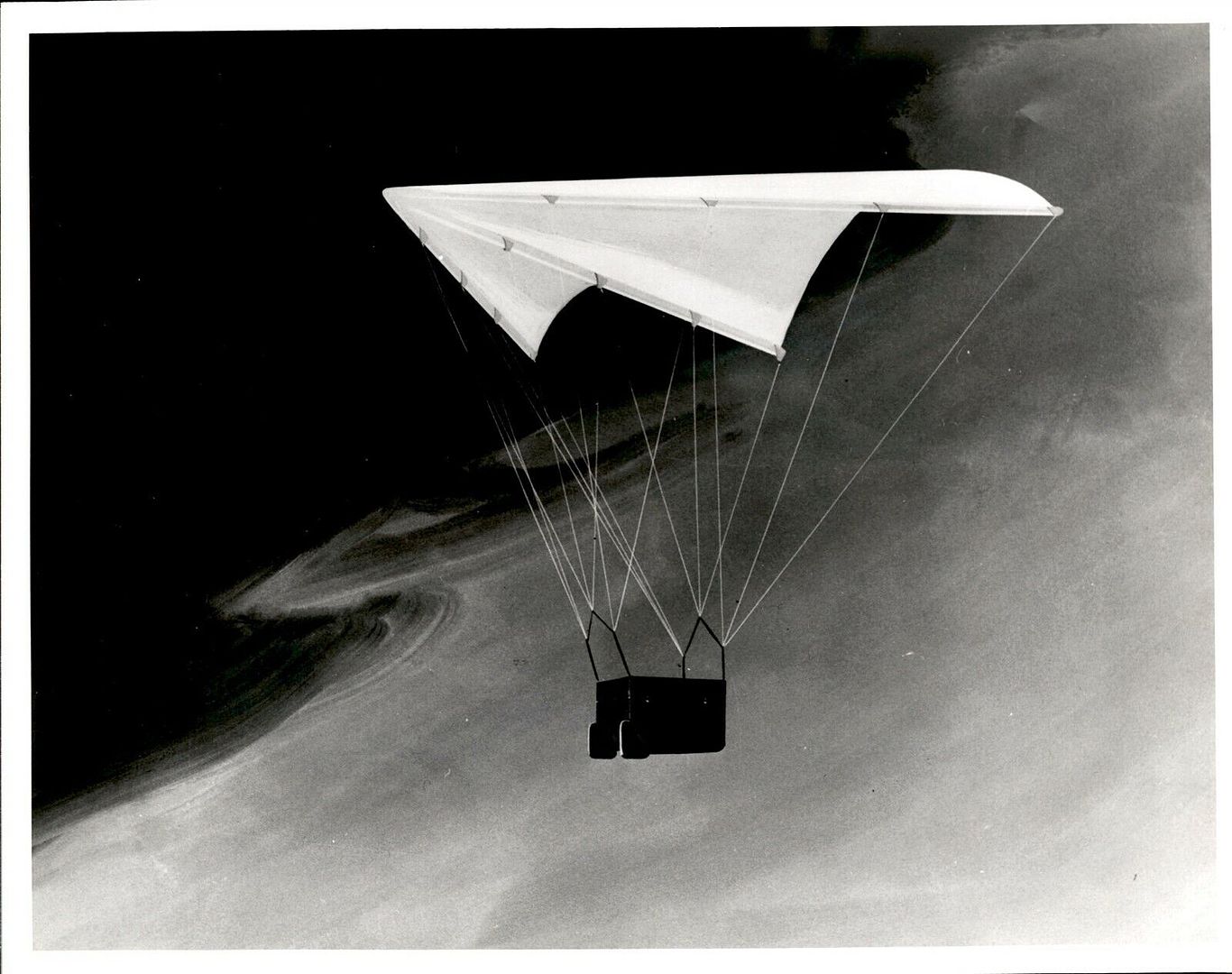
La entrega de suministros a unidades aisladas o sitiadas ha demostrado ser imprescindible en todos los conflictos. La Segunda Guerra Mundial introdujo la entrega por aire, con el lanzamiento en paracaídas de los suministros. Sin embargo la falta de precisión de estos envíos hacía que muchos se perdieran o incluso llegaran a manos equivocadas. Por ello se ha intentado realizar el lanzamiento de suministros en paracaídas teledirigidos. Éste es, posiblemente, uno de los intentos más antiguos, utilizando un ala Rogallo en lugar de un paracaídas.
El ala Rogallo es un tipo de ala flexible inventado en 1948 por Francis Rogallo, un ingeniero de la NASA, y su esposa Gertrude Rogallo, a la que llamaron Parawing, aunque suele ser conocida como «Ala Rogallo»
La NASA consideró utilizarla como un sistema de recuperación para las cápsulas Mercury y Gemini, aunque abandonó la idea en 1964 en favor de los paracaídas convencionales.
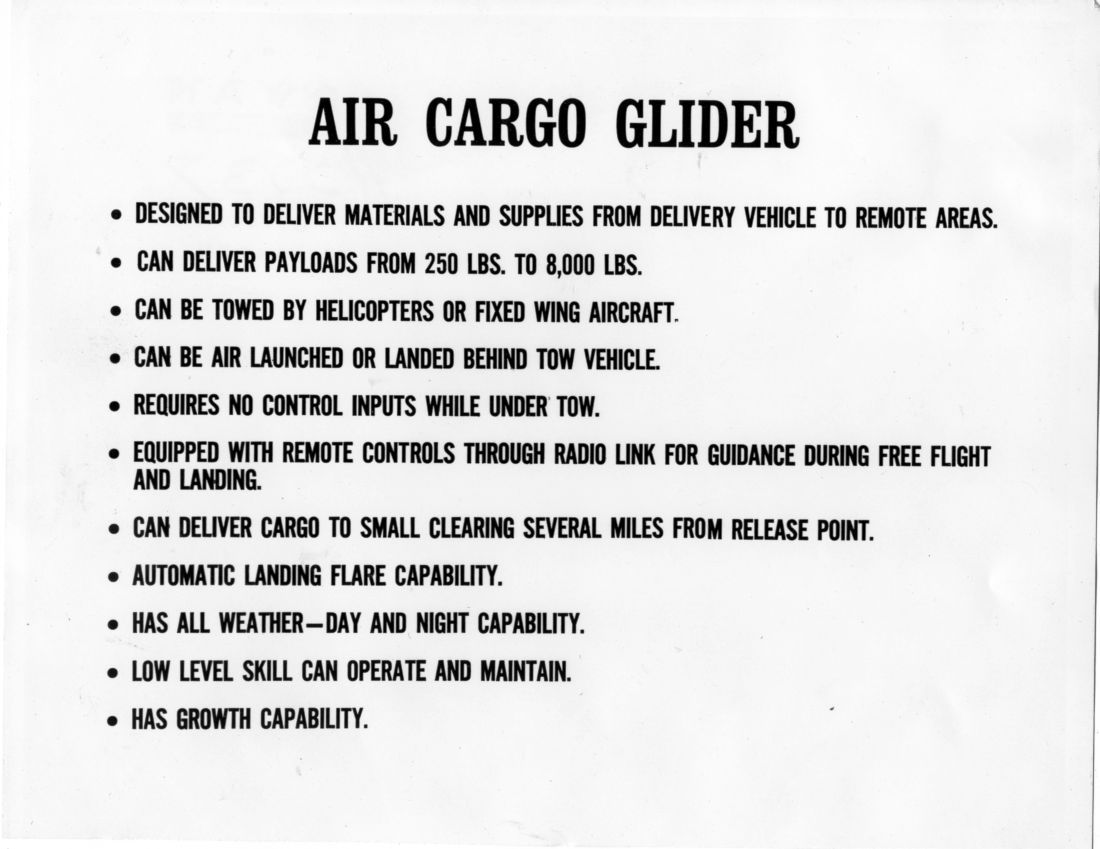
Ryan Aeronautical Company retomó la idea para realizar entregas de suministros con precisión, aunque éstos fueran lanzados desde un avión o un helicóptero.

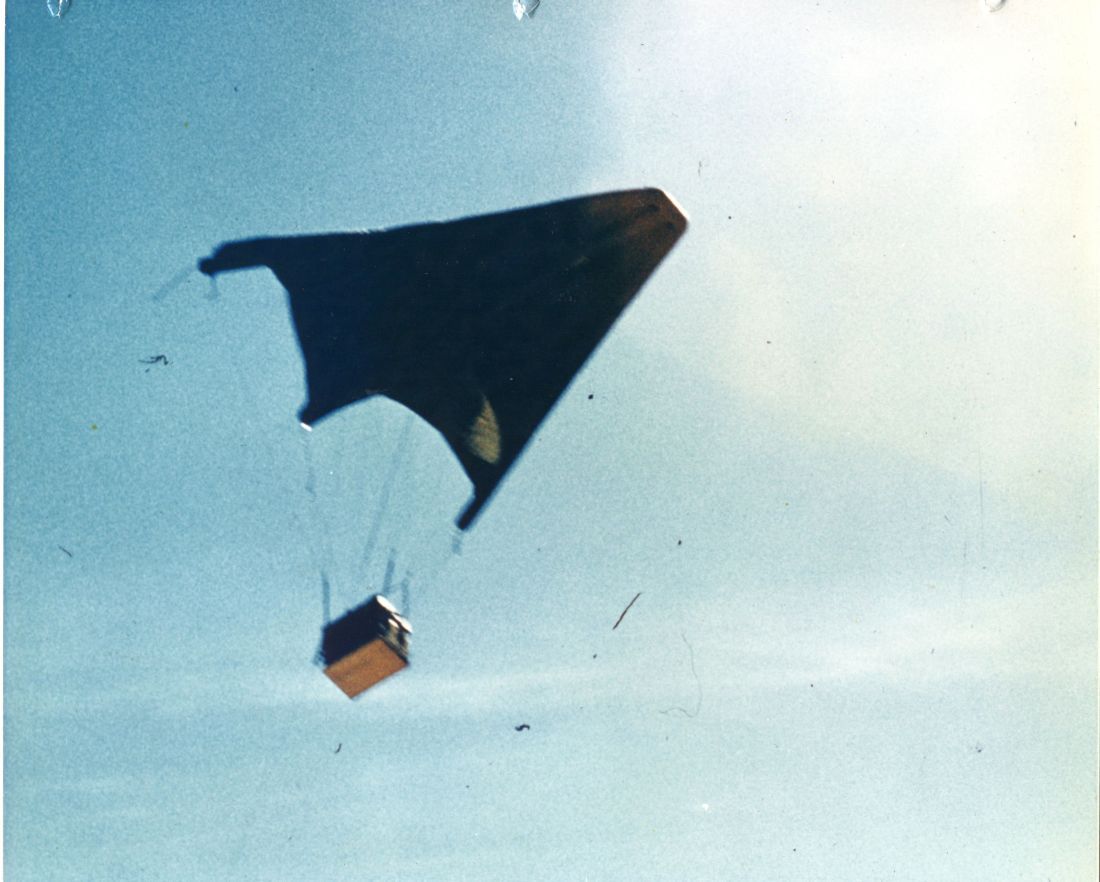
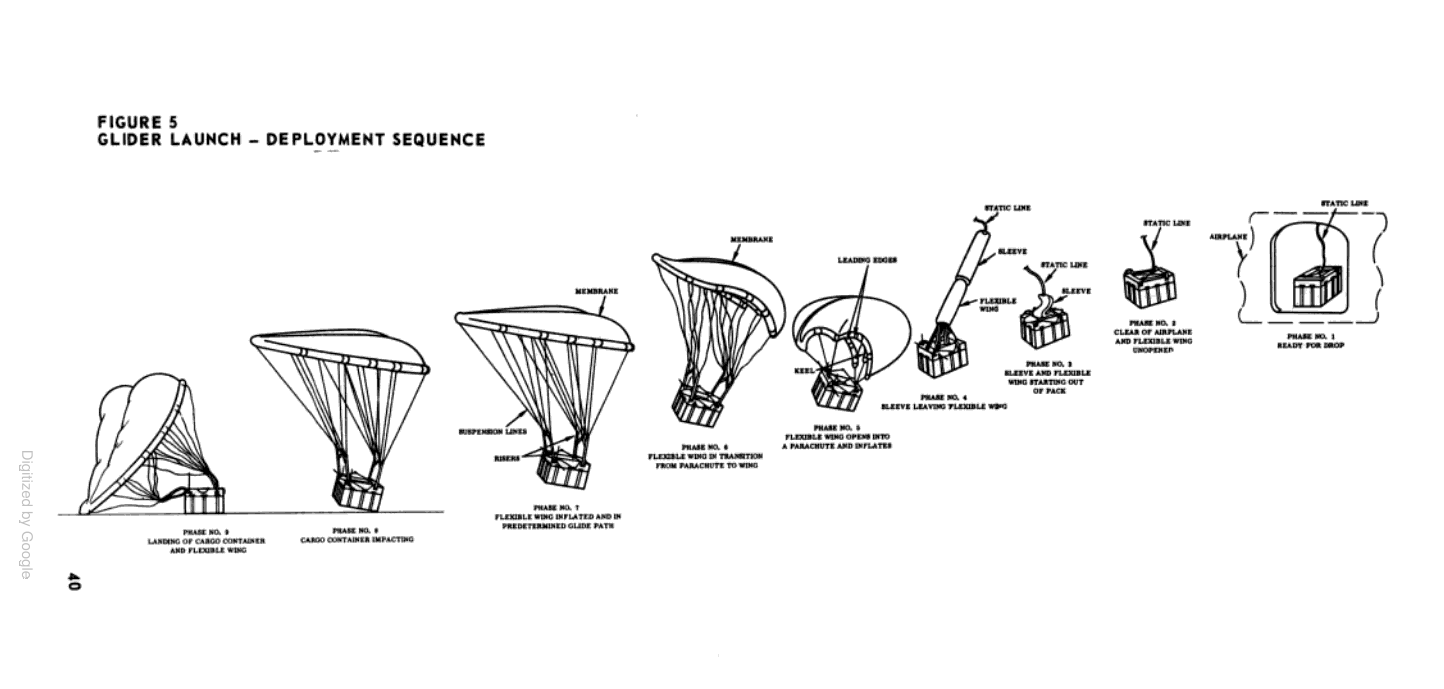
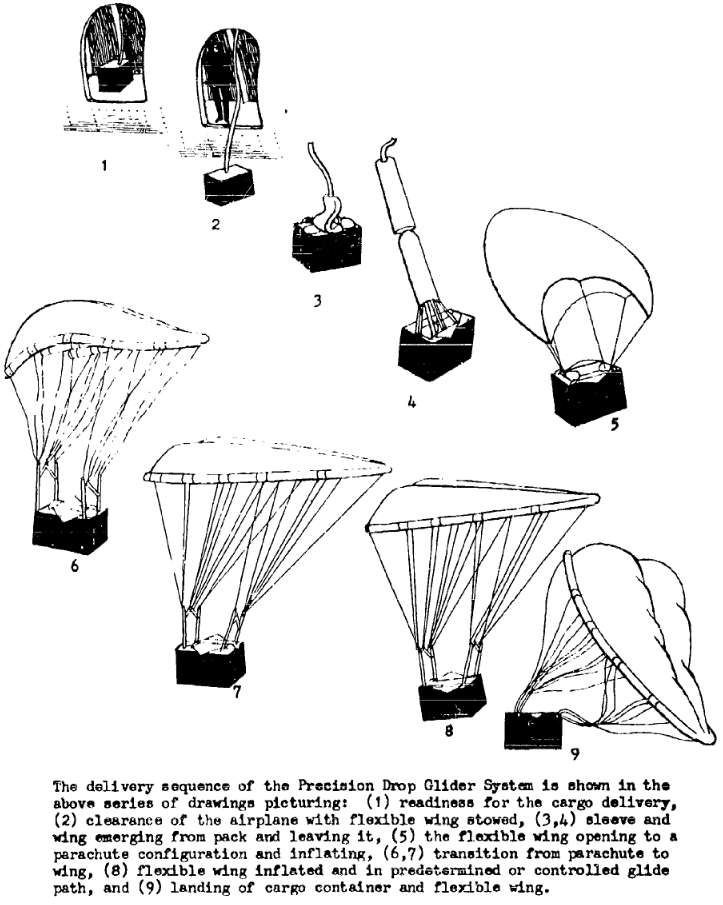
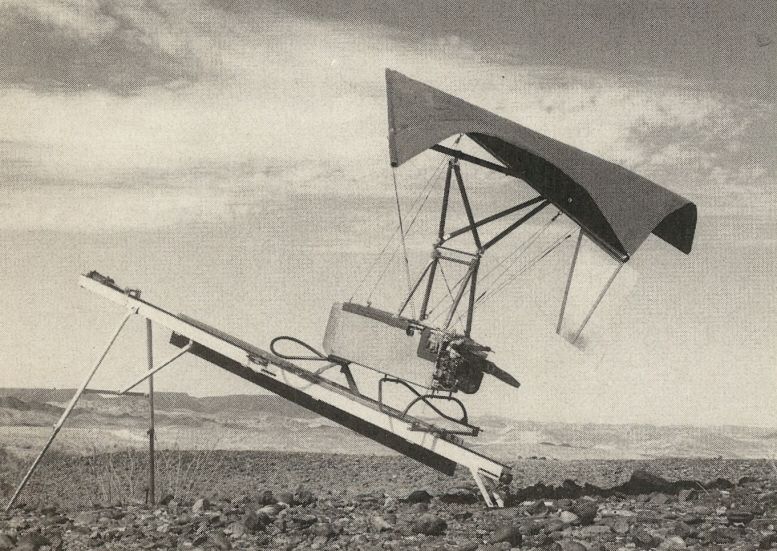
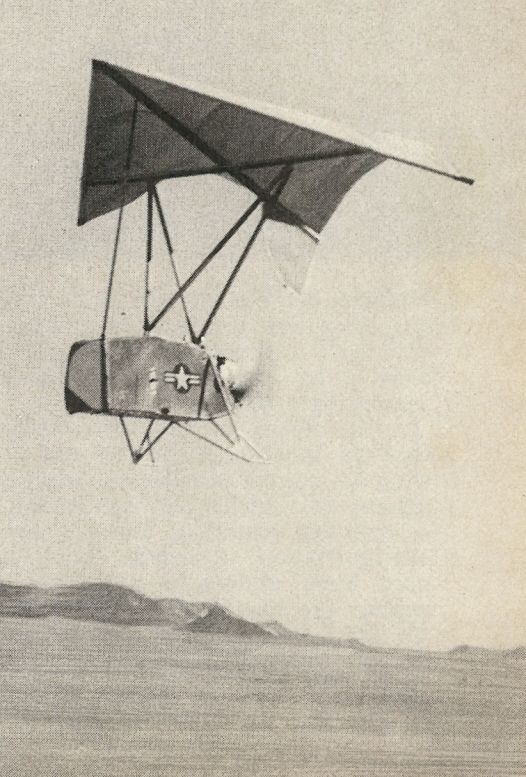
Podía funcionar de dos modos, bien remolcada por una aeronave, bien lanzada. En este caso, en una primera fase el ala funcionaría como un paracaídas, y una vez inflado actuaría como un planeador.
Todos los ensayos se realizaron en Yuma, Arizona, entre el 4 de octubre de 1962 y el 1 de marzo del año siguiente.
Los ensayos demostraron que se podían entregar con fiabilidad cargas que variaban entre las 100 y las 300 libras (de 50 a 150 kilos aprox). El radio de giro de planeador variaba entre los 200 y los 400 pies (de 30 a 60m), mientras que la tasa de planeo era similar a la de una piedra (2.8:1), con una velocidad vertical de entre 600 y 900 pies por minuto. La velocidad de vuelo era de 23 nudos (~40km/h).
Los ensayos de los vuelos planeados se realizaron a 95 nudos desde 9000ft sobre el terreno, que con la tasa de planeo de 2.8:1 le daba un alcance de unos 7.7km.
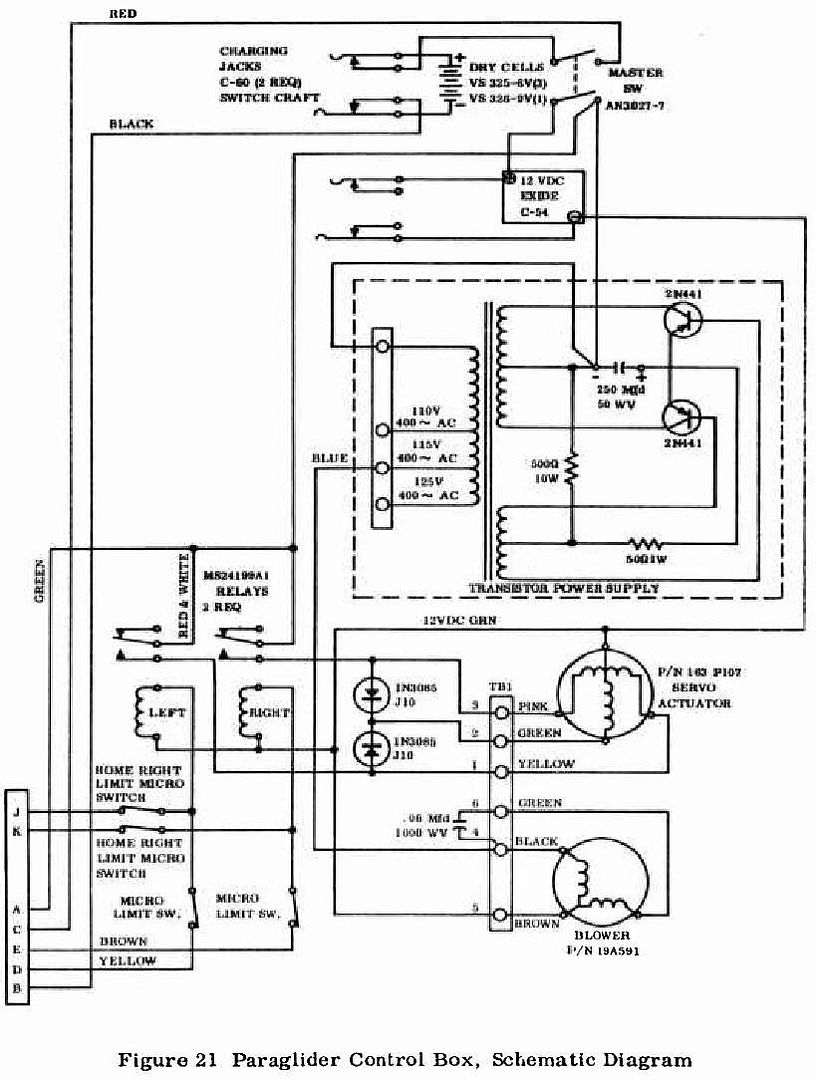
El control se conseguía gracias a un sistema de control remoto. El planeador llevaba dos compartimentos, uno con una batería de 28V y la antena, y otro con una batería de 12V y los servos.
Se realizaron 139 lanzamientos aéreos. En ellos se probaron distintas configuraciones de masas lanzadas, empaquetados y plegados del ala y distribuciones de las líneas que unían la carga útil y el ala. También se ensayaron distintos sistemas de control. En la primera treintena de lanzamientos se intentó utilizar el control por desplazamiento del centro de gravedad, sin éxito. Por ello se cambió el control a las líneas del ala flexible, como en los modernos parapentes.
Algunas de las configuraciones demostraron ser viables, aunque con esas tasas de caída hacían imprescindible el uso de amortiguadores de cartón para la carga.
Los ensayos operacionales se llevaron a cabo en Tailandia, de mayo a junio de 1963, de forma conjunta entre Ryan, ARPA, y los ejércitos estadounidense y tailandés.
En los ensayos operativos se pretendía demostrar la funcionalidad del sistema y su valía tanto para militares como para la policía y la patrulla de fronteras tailandesas, y su capacidad de operación en áreas remotas, así como las necesidades de formación y entrenamiento de personal para su uso.
El ala utilizada tenía un peso máximo al despegue de 386 libras, con una capacidad de carga de 300 libras. Fue lanzado desde distintos tipos de aeronaves, como C-47, Caribou, L-20 (DHC-2-Beaver), H-34 y UH-1.
El sistema de lanzamiento era por el portón lateral, con un sistema de apertura automático, parecido al de los paracaídas: La vela del ala iba dentro de una manga, que a su vez se cogía a la línea de lanzamiento. Al lanzarse por la puerta la vela salía de la manga, que quedaba en la línea, y se desplegaba automáticamente. Este proceso llevaba unos 4 segundos, desde que se producía el lanzamiento hasta que la vela estaba inflada y con forma de ala.
En tierra, un controlador debía tomar el control del planeador para dirigirlo hacia la zona de recepción deseada. Podía hacerlo de dos formas, bien por control manual o bien por control automático. En éste último el operador en lugar de controlar la aeronave, monitorizaba un sistema que, una vez encendido, dirigía de forma automática el planeador hacia él, hasta que llegaba a su vertical, y entonces comenzaba un descenso en espiral. El planeador aterrizaba así, de forma autónoma, en un radio de 100ft (30m) al rededor de la antena. Se comprobó que durante el control manual ésta era también la forma más sencilla de recuperar el planeador, dirigiéndolo hacia la vertical del controlador y aplicando después controles totalmente a la derecha o a la izquierda, para descender describiendo una hélice. Además esta maniobra reducía el tiempo de entrenamiento del operador, así como el tiempo que quedaba expuesto potencialmente el planeador al fuego enemigo.
El transmisor tenía un alcance de 25 millas, si ningún obstáculo, como montañas, se interponía entre él y el paquete lanzado.
Los ensayos se realizaron en todo tipo de terreno, con lanzamientos desde 10000ft, entrenamientos en aeródromos, lanzamientos en zonas despejadas, pero también en zonas de alta montaña y muy boscosas. ¡En uno de los lanzamientos, los controladores de tierra fueron lanzados en paracaídas y tuvieron que caminar tres días hasta la zona de recepción! En el primer lanzamiento, el sistema falló y al equipo le llevó otros tres días localizar el ala, pintada de verde oliva, en la jungla. Por este motivo se suspendieron los lanzamientos en la jungla, hasta que se logró mejorar la fiabilidad del sistema.
Las investigaciones dedujeron que los fallos se habían producido durante el lanzamiento, tras sufrir daños en el lanzamiento desde la línea.
Se hicieron entregas de más de cien kilos de carga, amortiguada por el sistema de cartones, que se demostró muy eficaz.
Con la llegada de la estación de lluvias se comprobó que el sistema no era adecuado para funcionar en esas condiciones.
Las conclusiones de la policía fueron que aunque el sistema necesitaba mejorar en fiabilidad, su coste podría amortizarse en uno o dos lanzamientos, evitando además la pérdida de material lanzado en paracaídas convencionales. El ejército concluyó que el aumento de precisión en el punto de toma de la carga podía merecer la pena para operaciones nocturnas o lanzamientos en zona de montaña, además de operaciones militares donde la baja visibilidad del sistema, su silencioso funcionamiento y la posibilidad de operar de noche facilitaba la entrega de material a las unidades sin delatar su posición. Por supuesto, se juzgó como un buen sistema para re-aprovisionar a las patrullas que estaban desplegadas en la jungla del país.
Las conclusiones del informe estadounidense fueron positivas para el sistema, si exceptuamos que pedían una mejora de un 90% en la fiabilidad para considerarlo viable para un despliegue operativo.
Nos consta que se realizaron otros ensayos en los que, además de ser dirigible, se le incorporaba una hélice, lo que permitía aumentar su alcance, así como aterrizajes más suaves.
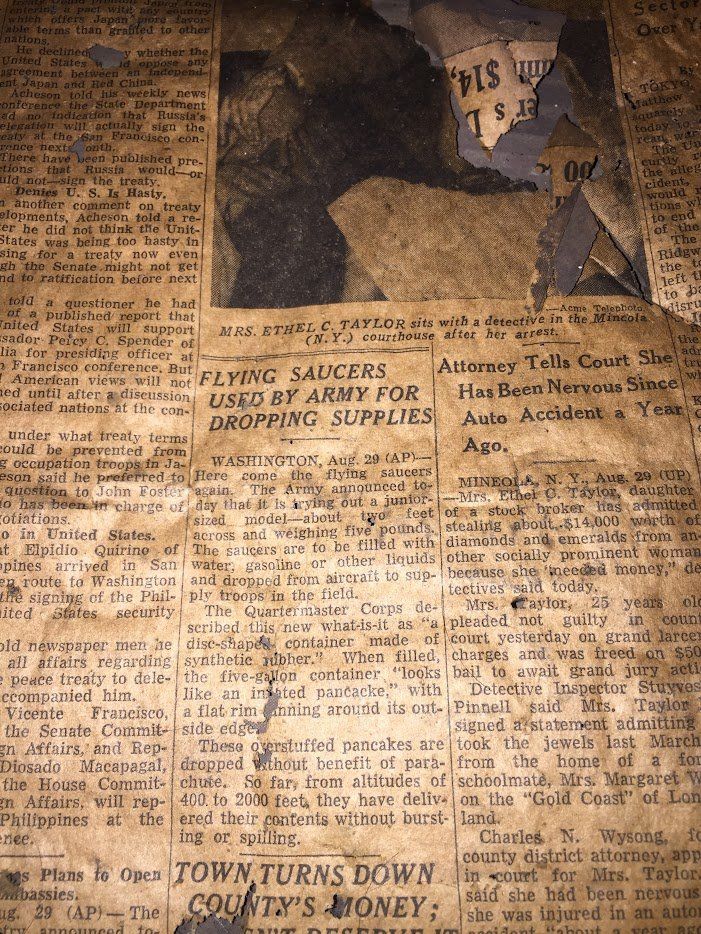
Gracias @MassiasThanos que me descubrió la historia y los pdfs, y al usuario @_ooo0OOOO0ooo_ que nos hizo llegar a Massiasy a mi un recorte del 29 de agosto de 1951 del St. Louis Post-Dispatch en el que se ve cómo el ejécito había intentado de otros modos mejorar la precisión de la entrega de las cargas aerotransportadas, en esta ocasión con unos discos volantes que hacían a su vez de contenedor de agua o gasolina, y prescindían del paracaídas.
Fuente: Flexible Wing precision drop glider [pdf], final report, Operational Demonstration And Evaluation Of The Flexible Wing Precision Drop Glider In Thailand [pdf] vía Thanos Massias; Secret Projects
Comparte esto:

Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.