Llevamos un tiempo siguiendo a Regent, una empresa que ha volado el primer prototipo de un vehículo de efecto suelo que ellos llaman Sea Glider y nosotros llamamos por el más popular nombre de ekranoplano, aunque en la literatura en lengua inglesa suele encontrarse como WIG o Wing-ing-ground vehicle.
El desarrollador y fabricante de Sea Gliderscon sede en Rhode Island ha completado las primeras pruebas en el agua del prototipo con personas a bordo, el Regent Viceroy, dando inicio a una campaña de pruebas que culminará con el primer vuelo del mismo con humanos a bordo a mitad de año.
Seguro que habéis comprobado que siempre que hablamos de aviones eléctricos son aviones con alas muy esbeltas, esto es, de gran alargamiento, casi más próximas en diseño a las de un velero o un motovelero que a las de un avión de aerolínea o un avión ligero.
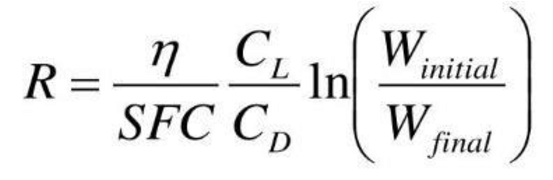
La ecuación se puede derivar de forma sencilla teniendo en cuenta que el avión vuela la mayor parte del tiempo en crucero, que se puede asimilar a un movimiento rectilíneo y uniforme, y por tanto la sustentación es igual al peso (L=W), la resistencia igual al empuje (D=T), que sustentación y resistencia se relacionan a través de la polar y que la potencia necesaria para volar en crucero es P=T·v·nu, siendo v la velocidad de vuelo y nu el rendimiento del grupo motopropulsor (el rendimiento del motor multiplicado por el de la hélice, por ejemplo).
Si alguien está interesado en el desarrollo matemático de la ecuación, puede encontrarlo en muchas fuentes, como la que hemos enlazado atrás, esta o esta otra.
Básicamente nos dice que el alcance (R de Range) depende del rendimiento motopropulsor, el consumo de combustible específico (SFC), la fineza aerodinámica y la relación entre la masa inicial y la final (y por tanto el combustible que puede consumir).
Esta sencilla ecuación permite comparaciones rápidas entre distintos diseños con parámetros sencillos y que pueden obtenerse fácilmente de los fabricantes, o al menos pueden estimarse con relativa facilidad. Asi que se pueden comparar diseños de forma teórica antes siquiera de haber empezado un desarrollo de detalle.
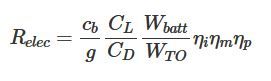
Se puede realizar un ejercicio similar para derivar esta ecuación para aviones híbridos, o para aviones eléctricos. Nosotros nos centraremos en la ecuación derivada para aviones eléctricos.
Donde Cb es la densidad energética de las baterías (en unidades de energía/masa kW·h/kg, por ejemplo), g es la aceleración de la gravedad, CL/CD es su fineza aerodinámica (la relación entre el coeficiente de sustentación y el de resistencia), Wbatt es el peso de las baterías, WTO es el peso al despegue, y ηi,ηm,ηp son los rendimientos del inversor, del motor y de la hélice.
Una versión aún más simplificada fue la que dio Archer en su web:
R=Ebatt· η·(CL/CD)/MTOW
ó
R=Cb·Wbatt· η· L/D / (MTOM · g)
Donde Ebatt es la energía en la batería y η el rendimiento motopropulsor.
Lo que nos quiere decir que el alcance del avión está definido básicamente por su aerodinámica, la densidad energética de sus baterías y la masa de baterías. En el avión eléctrico no entra en juego el peso final y el inicial, puesto que al no consumir combustible la masa al despegue y al aterrizaje serán la misma (lo que, por cierto, hará que el tren de aterrizaje sea más pesado que en un avión convencional, que no soporta el mismo peso en el aterrizaje que en el despegue).
Sobre el rendimiento motopropulsor apenas tendremos capacidad de decisión, puesto que el rendimiento del motor eléctrico rondará el 90% mientras que el de las hélices está entorno al 85%, así que este rendimiento motopropulsor se puede considerar como constante e igual a un 76.5%.
Nos quedan pues dos parámetros, el de la densidad energética de las baterías, que también se puede considerar constante y dependiente del estado del arte del momento, y la fineza aerodinámica.
Es decir, que si queremos optimizar nuestro diseño, realmente tan sólo podemos actuar sobre un parámetro que dependa de nosotros y no de los proveedores: la fineza aerodinámica.
Para maximizar esa fineza aerodinámica, no queda otra que recurrir a alas de gran alargamiento, tipo motovelero y planeador. Y es por esto que todos los aviones eléctricos cuentan en sus diseños con alas de gran alargamiento, puesto que es un parámetro con el que sí pueden «jugar» los diseñadores con facilidad, siempre teniendo en cuenta que el alargamiento del ala viene limitado por el ancho de la pista, de los aparcamientos, de los hangares… que limitan la envergadura, u obligan a soluciones ingeniosas como alas plegables. ¡Ah! Y si alguno os lo preguntabais, sí, estas ecuaciones de atrás son las que explican de forma sencillael desarrollo del nuevo Boeing con ala arriostrada.
Por finalizar, las densidades energéticas reales hoy en día rondan los 400W·h/kg, aunque se espera alcanzar los 600, e incluso se han llegado a alcanzar cotas superiores, pero siempre en condiciones de laboratorio, no de mundo real.
Y como la densidad se puede considerar también constante, esto nos lleva a una interesante conclusión (que no vamos a desarrollar mucho más porque ya lo hicieron Calin Gologan y Raphael Giesecke): Con la mejor tecnología de baterías que se espera tener, el alcance de los aviones eléctricos estará limitado a unos 500km, 800km en los casos más optimistas. Ésto sin consideraciones de cálculo de desvíos a aeropuertos alternativos. Lo que explica el por qué desde el comienzo los grandes constructores nunca han apostado por los aviones eléctricos, y en este blog siempre hemos defendido que, en el mejor de los casos, quedarán limitados a vuelos recreativos, de entrenamiento o —a lo sumo— operaciones comerciales tipo aerotaxi-vuelo regional-conmuter-evacuaciones médicas entre pequeños aeródromos municipales o entre éstos y algún gran hub central. Y por qué se juzga poco realista cualquier propuesta de diseño que vaya más allá de estos límites.
Como parte del esfuerzo de la Administración Federal de Aviación (FAA) para establecer directrices de diseño de vertipuertos para instalaciones destinadas a aceptar aeronaves de movilidad aérea urbana, eVTOLs, y helicópteros de clase especial, es cada vez más importante determinar los factores de riesgo relacionados con su operación y cómo mitigarlos.
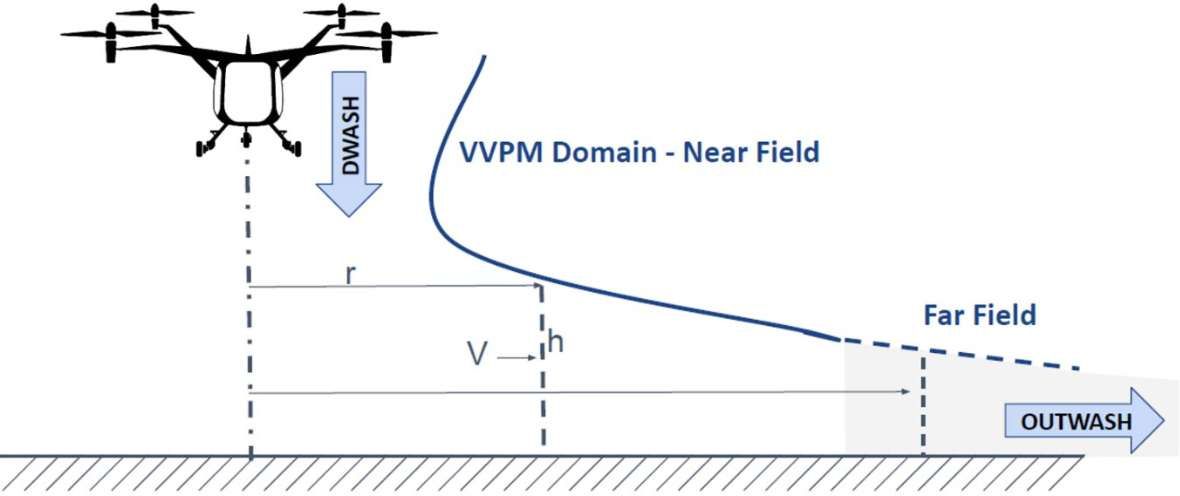
El flujo de aire generado por los rotores/propulsores de la aeronave durante el despegue y aterrizaje, conocido como DWOW, siglas de DownWash and OutWash, puede representar riesgos significativos para las personas y la propiedad en las cercanías de las operaciones de la aeronave. El downwash es el flujo vertical y descendente de aire producido por los rotores/propulsores, mientras que el outwash es el flujo lateral, radial y hacia afuera que ocurre cuando el aire descendente es deflectado al entrar en contacto con la superficie de aterrizaje.
Los impactos negativos de DWOW pueden verse exacerbados en ubicaciones de vertipuertos en áreas urbanas donde se proponen operaciones de alto volumen y alto ritmo debido a las densas poblaciones y el mayor tráfico en esas áreas. Sin embargo, la investigación actual sobre los efectos y la mitigación de DWOW es limitada. Este informe (Electric Vertical Takeoff and Landing (eVTOL) Downwash and Outwash Surveys) describe la recolección y análisis de datos de DWOW de aeronaves VTOL y la necesidad de mitigar los riesgos asociados.
La forma más confiable de obtener datos de DWOW de eVTOL es a través de ensayos de aeronaves a escala real. Esta investigación midió el DWOW de tres prototipos de aeronaves eVTOL, no identificados, para determinar su velocidad máxima en varias ubicaciones de un vertipuerto.
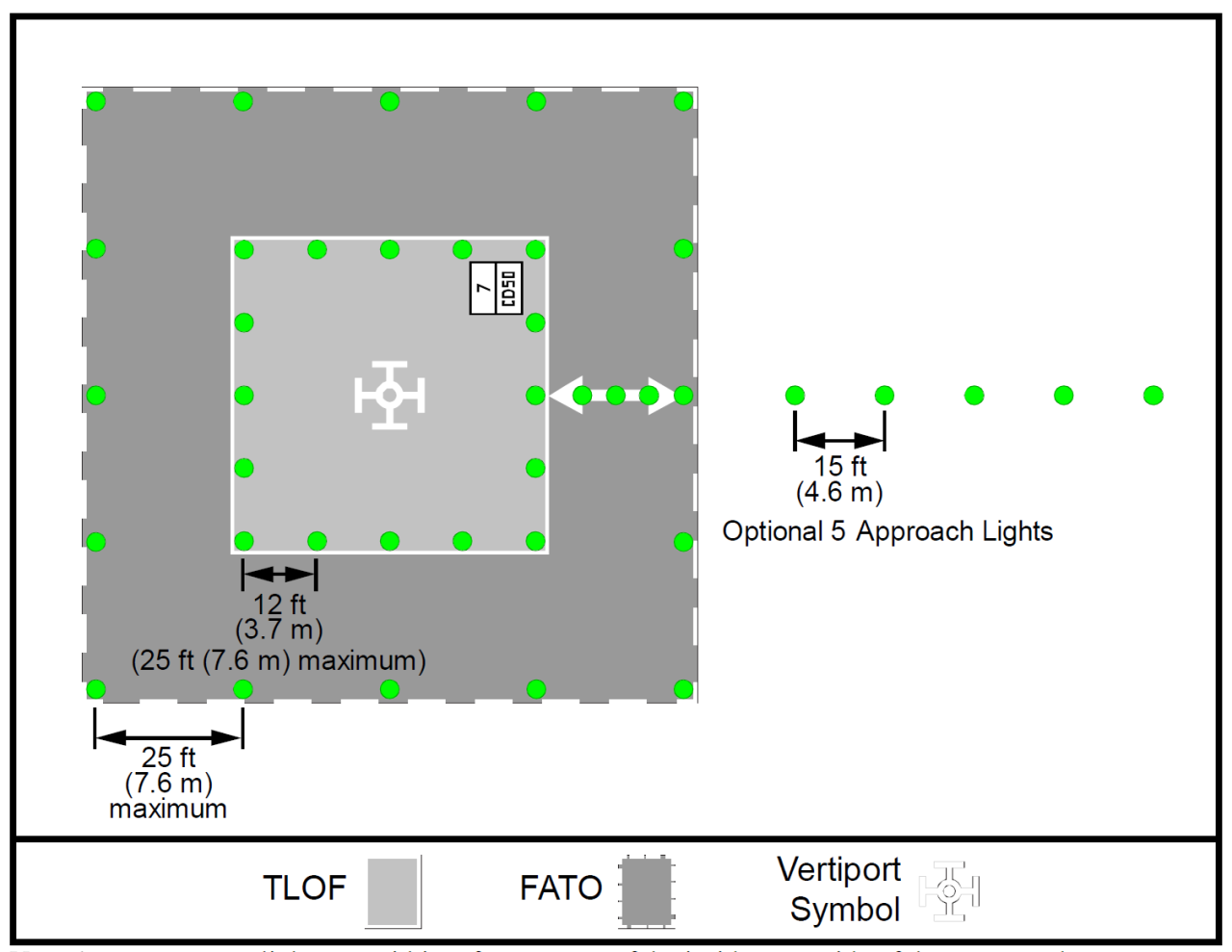
Se utilizó una red de sensores a nivel del suelo y una red vertical de anemómetros tridimensionales para recopilar las velocidades del viento. Los ensayos se realizaron en diferentes momentos y ubicaciones, y se llevaron a cabo bajo condiciones meteorológicas visuales diurnas. Los pilotos de las aeronaves realizaron varias maniobras preestablecidas y características de la operación normal de estas aeronaves (aproximaciones, vuelos a punto fijo…) dentro de los límites establecidos para ellas en este tipo de «helipuerto especial». Sin embargo, la FAA señala: “En el momento de las pruebas, los perfiles de vuelo de las aeronaves estaban limitados debido a la naturaleza experimental de las aeronaves y su etapa temprana de desarrollo”.
Las tres aeronaves estudiadas, todas prototipos de aeronaves en desarrollo, variaban en configuración, número de sistemas de propulsión, palas por unidad de propulsión y peso máximo de despegue, siendo este siempre inferior a 6500 libras (2950 kg). Solo uno de los tres fue pilotado a bordo, mientras que los otros dos fueron operados remotamente.
El análisis de los resultados incluyó velocidades instantáneas máximas, medias en movimiento y desviaciones estándar en movimiento basadas en un período de tiempo de 3 segundos, y un percentil 95 en movimiento durante 3 segundos. Las mediciones fueron comparadas con modelados y simulaciones del método de partículas vórtices viscosos, cuando fue posible.
“El flujo de aire descendente y de salida (DWOW) de los aviones eVTOL puede representar riesgos significativos para las personas y la propiedad y debe ser tenido en cuenta en el diseño de los vertipuertos”, señala la FAA.
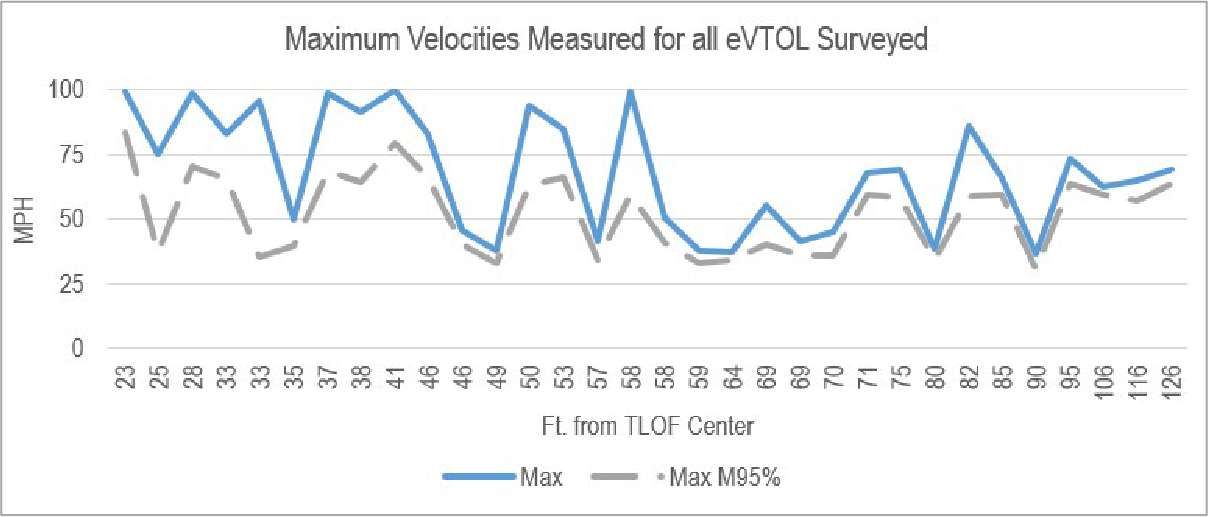
Utilizando tres prototipos de aeronaves eVTOL no identificadas proporcionadas por sus fabricantes, el estudio de la FAA encontró que la velocidad máxima instantánea del flujo de aire generado por los rotores o propulsores fue de casi 100 mph (86 kt/160 km/h) a una distancia de 41 pies (12 m) del centro del área de despegue y aterrizaje.
Incluso a 100 pies (30.5 m) del centro del área de despegue, se registraron velocidades de 60 mph (100km/h), agrega la FAA, y la velocidad más alta en el percentil 95 en un período de tres segundos fue de 84 mph (135 km/h) a 23 pies (7 m) del centro. Los datos del percentil 95 en movimiento para uno de los tres eVTOLs – un modelo pilotado remotamente – muestran una cifra de casi 64 mph (103 km/h) a 126 pies (38.5 m) del centro del área de despegue.
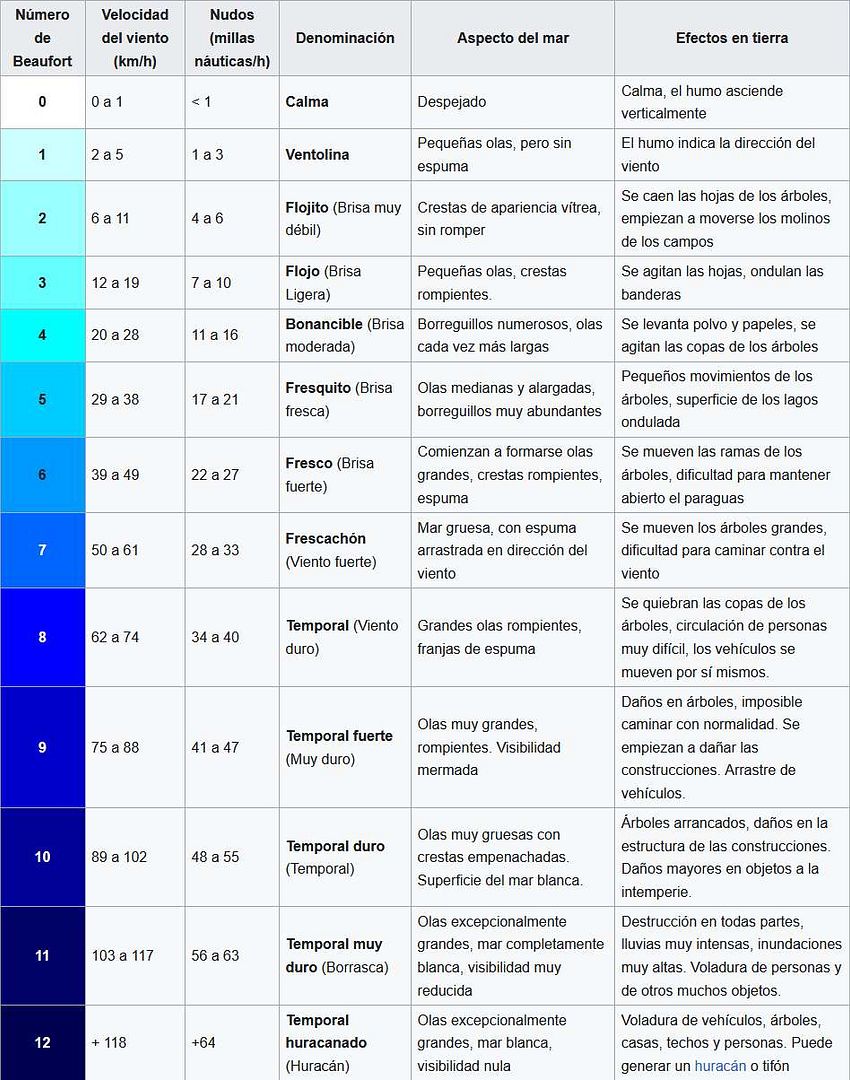
El informe, para una mejor comprensión de los resultados, los compara con la escala de Beaufort.
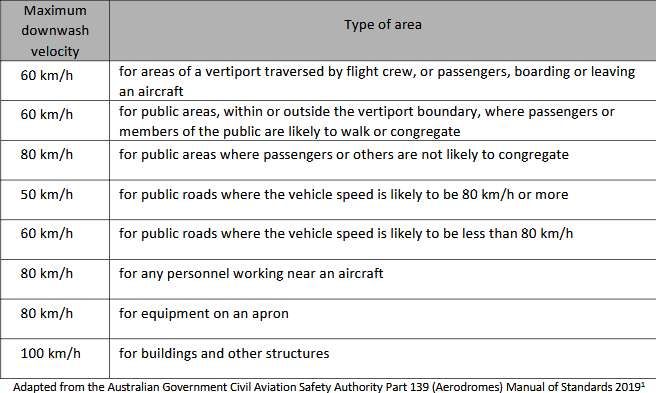
La guía de la FAA indica que la mayoría de los accidentes relacionados con estos vientos causados por el rotor pueden evitarse si se mantienen distancias de seguridad tales en las que el viento causado por el rotor sea de 30-40kt (55.5-74 km/h). Así pues, El DWOW de las aeronaves eVTOL en el área de seguridad definida en la guía para el diseño de vertipuertos, y más allá, supera la mayoría de los umbrales de seguridad de velocidad contrados en la guía de la FAA, afirma el informe.
El flujo de alta velocidad de DWOW generado por las aeronaves eVTOL podría fácilmente ir más allá del área de seguridad de un vertipuerto, crear riesgos de seguridad para personas, aeronaves, equipos e infraestructura, tanto dentro como fuera del sitio.
Los fabricantes de eVTOL proponen operaciones eVTOL de alto volumen y alta frecuencia en áreas urbanas, lo que tiene un mayor potencial de impactar a los transeúntes con DWOW que los helicópteros tradicionales en helipuertos
Los resultados sugieren que el deseo de la industria de eVTOL de establecer áreas de aterrizaje en estructuras existentes, como garajes o cubiertas de algunos edificios, es poco probable que sea factible.
Los nuevos diseños de rotores múltiples y las complejidades de las interacciones entre estela a estela, estela a fuselaje y estela al suelo – que también variaban con la velocidad, el rumbo y la altitud – resultaron en “campos de flujo de DWOW no uniformes y de alta velocidad que pueden fácilmente ir más allá del área de seguridad de un vertipuerto”, dice, lo que justifica más investigación.
En un entorno real, esos campos de flujo también podrían verse impactados por estructuras en el suelo que no estaban presentes en el estudio.
Adicionalmente, cabe reflexionar acerca del ruido real que van a generar esos vientos. Una segunda derivada a tener en cuenta es que se han propuesto drones de tamaño similar a estos eVTOL para combatir incendios en edificios, pero si los vientos generados son de esta magnitud, podría no tener ningún sentido su desarrollo.
La última vez que hablamos de aviación ligera eléctrica y convencional china en este blog fue con el Yuneec E430, hubiera sido el primer ultraligero eléctrico que se hubiera comercializado. Tras un pequeño boom de noticias de aviones eléctricos, estas se detuvieron hasta hace relativamente poco. Había quedado claro que quedaba mucho por desarrollar en tecnología de baterías y almacenamiento eléctrico.
En los últimos años hemos vuelto a tener otra explosión de noticias de aeronaves eléctricas, especialmente las dedicadas a la nueva movilidad aérea, y algunos modelos de aviones convencionales más o menos prometedores. Pero hasta ahora no habíamos vuelto a saber de ningún modelo chino que estuviera próximo a la certificación o comercialización.
Por eso nos ha sorprendido, y agradado, encontrar esta nota de prensa que presenta el RX4W, una aeronave cuatriplaza, más o menos equiparable en tamaño a una Cessna 172, y con un motor eléctrico de 140kW~185CV y una batería de 70 kWh, que le confiere una autonomía de hasta 1.5h.
La configuración es de ala alta en voladizo, con un ala de gran alargamiento, como viene siendo habitual en los diseños de avión eléctrico.
El certificado de tipo lo ha conseguido bajo la CCAR-23, que son las normas de aeronavegabilidad aplicables en china a aviones de categoría normal, utilitaria, acrobática y de transporte regional y que en China aplica a todos los aviones de hasta 19 asientos para pasajeros y un peso máximo certificado al despegue de 8618 kg. Normativa que, en principio, cabe de esperar que sea más restrictiva que la CS-VLA bajo la que se han certificado los últimos aviones eléctricos convencionales europeos.
Ha sido desarrollado por la Academia de Aviación General de la Universidad Aeroespacial de Shenyang, en Liaoning, que previamente había desarrollado otras aeronaves ligeras eléctricas, como el SAU BX1E.
El avión cuenta con una envergadura de 13,5 metros y una longitud de 8,4 metros, con un peso máximo al despegue de 1260 kg. Es impulsado por una batería de litio con una capacidad total de 70 kWh y un sistema de propulsión eléctrica capaz de alcanzar una potencia máxima de 140 kW.
Se espera que el RX4E sea bien recibido y tenga gran acogida en escuelas de vuelo, vuelos turísticos y fotografía aérea.
También están en marcha planes para desarrollar variantes con flotadores para agua y esquíes para nueve, así como propulsados por pila de hidrógeno.
El proceso de certificación de tipo, iniciado cuando la CAAC aceptó la solicitud de diseño el 11 de noviembre de 2019, ha llevado cinco años.