Cuando pensamos en aviones históricos que se han recuperado y vuelto a poner en vuelo, solemos pensar en cazas. De hecho, no es la primera vez que lo decimos, parece que los cazas eclipsan como aviones a los bombarderos, a los aviones de transporte y a los de enlace. Pero esos también son nuestros favoritos, así que cuando hemos visto en Vintage Aviation News que el único DC-3 anfibio que queda en el mundo había vuelto a volar, el 24 de septiembre de 2024, nos ha encantado.
El avión, N130Q, fue construido como avión terrestre por Douglas en Santa Mónica, California, en 1943 como un C-53D-DO con el número de serie 42-68834.
Voló hasta 1952 para Eastern Airlines después de ser «civilizado» y convertido a DC-3B , con la matrícula N86562, antes de pasar por una serie de otros propietarios civiles.
En 1986, N130Q fue adquirido por HBF, Inc., de Greenville, Maine, una sociedad liderada por Richard B. “Dick” Folsom, el fundador en 1946 de Folsom’s Air Service en Greenville, un importante operador de hidroaviones en el lago Moosehead, conocido en todo el mundo como el hogar del International Seaplane Fly-In cada septiembre. También fue veterano del Cuerpo Aéreo del Ejército de EE. UU (USAAC). durante la Segunda Guerra Mundial. Con el N130Q, Folsom se propuso recrear el famoso hidroavión XC-47C que fue objeto de pruebas por parte del USAAC en las etapas finales de la Segunda Guerra Mundial.
La conversión del C-53 a un anfibio no estuvo exenta de desafíos; Folsom había adquirido uno de los únicos conjuntos intactos de flotadores Edo al mismo tiempo que el DC-3, pero le llevó cuatro años tener toda la parafernalia necesaria para montarlos y ajustarlos en el avión.
El avión voló mucho durante aproximadamente una década, incluyendo un viaje a Sun ‘n Fun 2003 en Lakeland, Florida. Pero tras el fallecimiento de Dick Folsom en 2002 a la edad de 83 años, voló por última vez con flotadores en 2004. Con los flotadores retirados, N130Q volvió a volar en 2010. El hijo de Dick, Max, quien había dirigido el servicio aéreo familiar desde 1982, falleció en septiembre de 2023, y tras su muerte, su hermano, Rodney Folsom, Sr., comenzó a trabajar para devolver el legendario avión a los cielos.
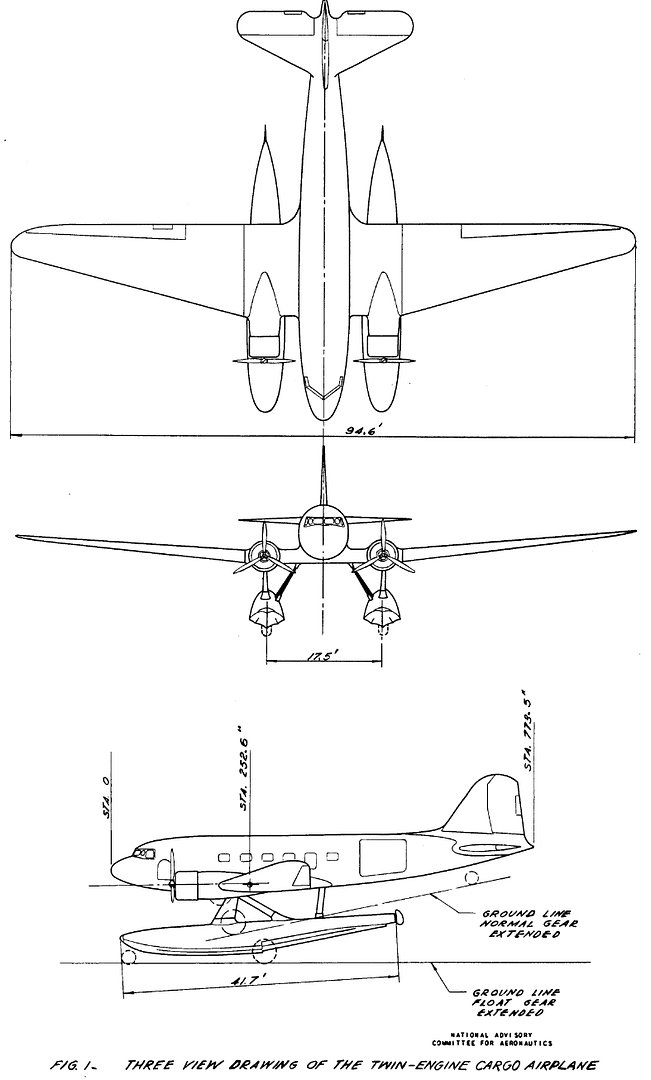
Una vez restaurado, el dueño se enfrentó a un problema. ¿Cómo se comporta el avión con flotadores? ¿Es absurdamente pesado?¿Cuál es su velocidad máxima? Hacía más de dos décadas desde el último vuelo como hidroavión, ¡no quedaban pilotos vivos de hidroaviones DC-3! Aunque, al menos, sí están bien documentados los efectos de los grandes flotadores de Edo en el Wartime report NACA-WR-A-73 de la NACA (ahora NASA)
A medida que el avión se acercaba a estar listo para el vuelo, Rodney comenzó a buscar pilotos calificados en agosto de 2024 y finalmente eligió a Eric Zipkin como piloto al mando para el primer vuelo, acompañado por Garrett Fleishman como copiloto.
Eric y Garrett son ambos capitanes experimentados en el C-47 Placid Lassie para la Tunison Foundation, con experiencia adicional en otras variantes de la familia DC-3. Eric y Garrett han volado DC-3 desde 2010 y 2019, respectivamente, cada uno con experiencia sustancial en una amplia gama de aviones históricos.
Además, Eric es un piloto de hidroaviones experimentado, habiendo comenzado su carrera como instructor de hidroaviones en Goodspeed Airport & Seaplane Base en Connecticut en 2001.
Eric habló con Vintage Aviation News para describir su experiencia con el DC-3 anfibio.
El DC-3 en flotadores es el avión más genial que he volado, sin duda. Es más pesado, tiene mucha más resistencia, pero todavía vuela como un DC-3. No es un buen avión terrestre, es incluso más complicado de carretear que el DC-3 normal, es un poco torpe. Sin embargo, puedes pasar sobre casi cualquier cosa durante el carreteo, ¡es tan alto! El peso vacío del avión es de más de 20,000 libras, lo que lo convierte en un DC-3 muy pesado. En el agua, mi experiencia es aún bastante limitada, pero parece manejarse bastante bien. Estaba un poco preocupado, porque tenía una reputación durante la guerra de no ser un buen avión para el agua. Más tarde descubrí, hablando con algunas personas que han hecho mucha más investigación histórica sobre los aviones, que los pilotos que probaron el avión no tenían experiencia en hidroaviones, porque era el Cuerpo Aéreo del Ejército, y simplemente tomaron a los pilotos de pruebas habituales… (que no habían volado nunca hidroaviones). El flotador es realmente una versión agrandada de los flotadores Edo que verías en un Cessna 180/185. Las velocidades de despegue y aterrizaje son comparables a un DC-3 terrestre, aunque la velocidad de crucero se reduce a sólo 115 nudos.
Los pilotos de hidroaviones saben bien la importancia de los timones de agua para su maniobrabilidad en el agua, y aunque es el hidroavión —sobre flotadores, no hidrocanoa— más grande del mundo que queda en estado de vuelo, el DC-3 en flotadores no es una excepción, aunque con sus peculiaridades. Los timones de agua son retráctiles y controlados hidráulicamente, aunque por un sistema separado del sistema hidráulico maestro que normalmente opera los flaps, el tren de aterrizaje, los flaps del motor y los limpiaparabrisas en un DC-3 terrestre. Este sistema hidráulico “auxiliar” para los timones de agua es impulsado por una bomba eléctrica, que se enciende y apaga en la cabina cuando es necesario. El tren de aterrizaje anfibio es hidráulico y se retrae mediante un procedimiento idéntico al de los DC-3 terrestres, a través del sistema hidráulico maestro. En cuanto a los timones de agua, Eric dice que son efectivos, y curiosamente contrasta con muchos hidroaviones multimotores hoy en día, que tienen hélices con paso variable y reversa para maniobras en el agua.
Por ahora, Eric lleva la improbable carga de ser el único capitán vivo de hidroaviones DC-3, pero la pregunta que todos se hacen es cuál es el futuro para este extraordinario y único avión, que siendo algo incierto, parece mucho más brillante que en los últimos 20 años.
El XC-47C

El Douglas XC-47C fue uno de los desarrollos más interesantes del clásico de Douglas. Posiblemente fue desarrollado para determinar la viabilidad del avión para operar de forma anfibia, capacidad muy interesante en el teatro de operaciones del Pacífico, para el que también se intentó desarrollar una variante sobre flotadores del Wildcat, en contrapartida al Rufe japonés, por ejemplo. No he podido encontrar en mis búsquedas de internet si la idea surgió de la planificación de contingencias militares, de la necesidad de financiar a la Edo Aircraft Corp. o si respondía a una necesidad específica
La Edo Aircraft Corp. fabricó sus flotadores anfibios Modelo 78 para las pruebas, y parece que funcionaron lo suficientemente bien para operaciones en aguas tranquilas, al menos, como se puede ver en este video de YouTube.

Lois flotadores gemelos pesaban 1 tonelada (los flotadores más grandes jamás construidos). Cada flotador medía 12.8m de largo, 1.7m de ancho, y desplazaba 13166kg de agua. Cada flotador tenía 14 compartimentos estancos separados y también contaba con un tanque de combustible de 325 galones (1230 litros). Los flotadores tenían ruedas hidráulicas totalmente retráctiles y podían aterrizar en agua, nieve o tierra. Los timones de agua se operaban por un sistema hidráulico independiente, aunque se movían con los mismos pedales que el timón de dirección.

El XC-47C pesaba 34,162 libras (15510kg) y presentaba varias deficiencias graves. Los pilotos encontraron que el C-47C era difícil de lanzar en aguas agitada y se comportaba como un “pogo stick” al aterrizar en cualquier superficie que no fuera un espejo de agua lisa. Tenía una alta tasa de fallos en los neumáticos en tierra y era difícil de manejar en aterrizajes con viento cruzado. El C-47C era lento en el despegue y los depósitos JATO hicieron poco para mejorar su rendimiento. También era aproximadamente 30 mph más lento que sus hermanas sin flotadores.
Este video también muestra cómo se subía y bajaba del avión utilizandodos escaleras, más lospeldaños en el soporte del flotador trasero izquierdo.