Emiratos Arabes, como Turquía o Corea, llevan un tiempo invirtiendo muchos recursos en crear una industria de defensa, y aeronáutica que es lo que nos ocupa en este blog, y en su última feria de defensa IDEX 2025, que se está celebrando esta semana, su compañía EDGE ha presentado todas sus novedades
Los productos aeronáuticos desarrollados por EDGE se pueden dividir en tres grandes grupos, por lo que hemos podido ver en su página web. Bien aeronaves convencionales, muy buenas plataformas existentes, dronizadas; bien desarrollos conjuntos con empresas occidentales, start-ups o pymes, en las que invierte o las adquiere parcialmente. Bien versiones bajo licencia.
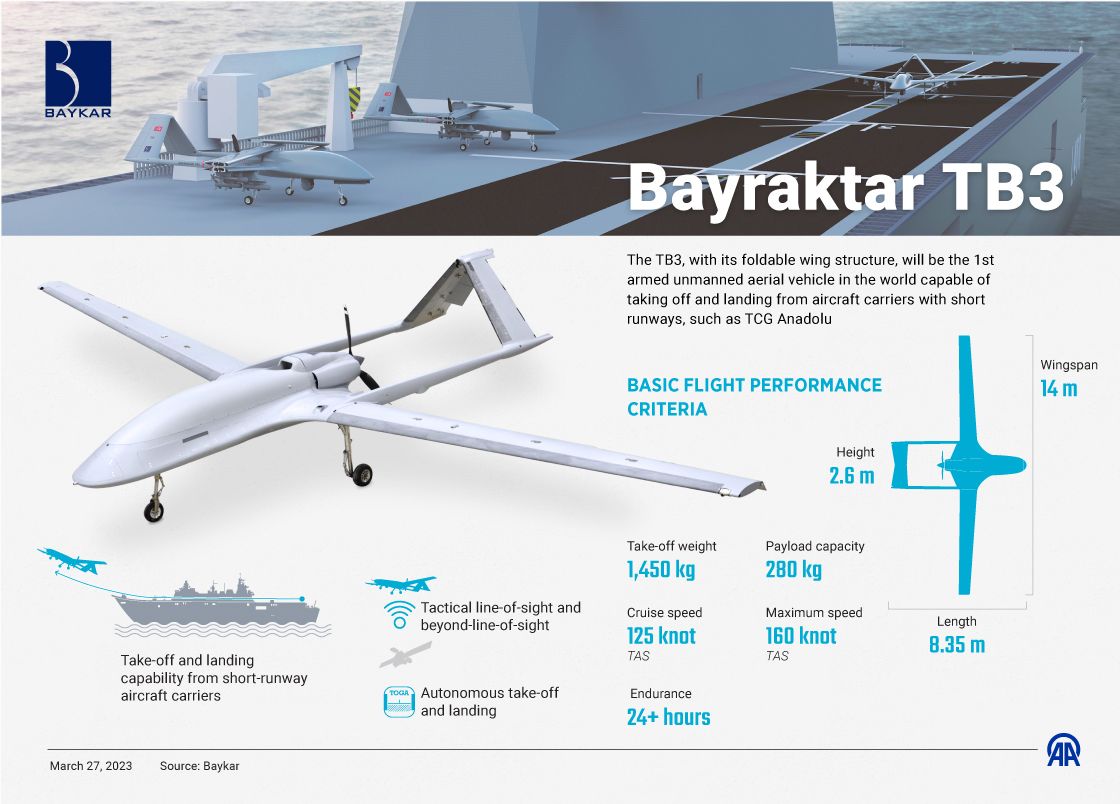
Por ejemplo, EDGE ha presentado su propio modelo del dron turco Bayraktar TB-2, bajo el nombre de REACH-M. Han presentado 3 uavs kamikazes:
- el HUNTER 2-S, con un alcance de 50km, una carga explosiva de 2kg y una autonomía de 45min, a 90km/h.
- El HUNTER SP, un pequeño drone de 4 kg
- El Hunter-10, con una cabeza explosiva de 10kg y un peso máximo al despegue de 50. Con alas plegables, se puede transportar en contenedores-lanzadores múltiples instalados sobre vehículos blindados Ajban 441AE.

Más llamativo y fuera de lo común es el helicóptero HT-750, desarrollado de forma conjunta entre EDGE y la Anavia. Se trata de un helicóptero no tripulado de gran tamaño, con una masa máxima al despegue de 1150 kg, una carga de pago de 750kg, y una velocidad máxima de 220 km/h. El diseño es modular, pues el helicóptero está concebido entorno a un exoestructura que contiene todos los sistemas necesarios para hacerlo volar de forma autónoma, y una «cabina» desmontable e intercambiable configurable para distintas misiones, como carga o ISR.
EDGE, como desarrollo de su subsidiaria ADASI, presentó el UCAV JENIAH, un reactor de combate que alcanza velocidades de crucero de M0.7 y que entra en la misma categoría que el turco Kizilelma y otros similares, posiblemente con idea de que pueda llegar a ser operado en enjambres controlados desde un «pastor de drones» o haciendo equipo con otras aeronaves tripuladas. Está construido con tecnología furtiva, según el fabricante, incluida una bodega interna de bombas. Su peso máximo de despegue supera los 4,000 kg, y su carga útil de 480 kg permite realizar una amplia variedad de misiones, como reconocimiento, vigilancia, reconocimiento de áreas y ataques precisos a objetivos de alta prioridad.
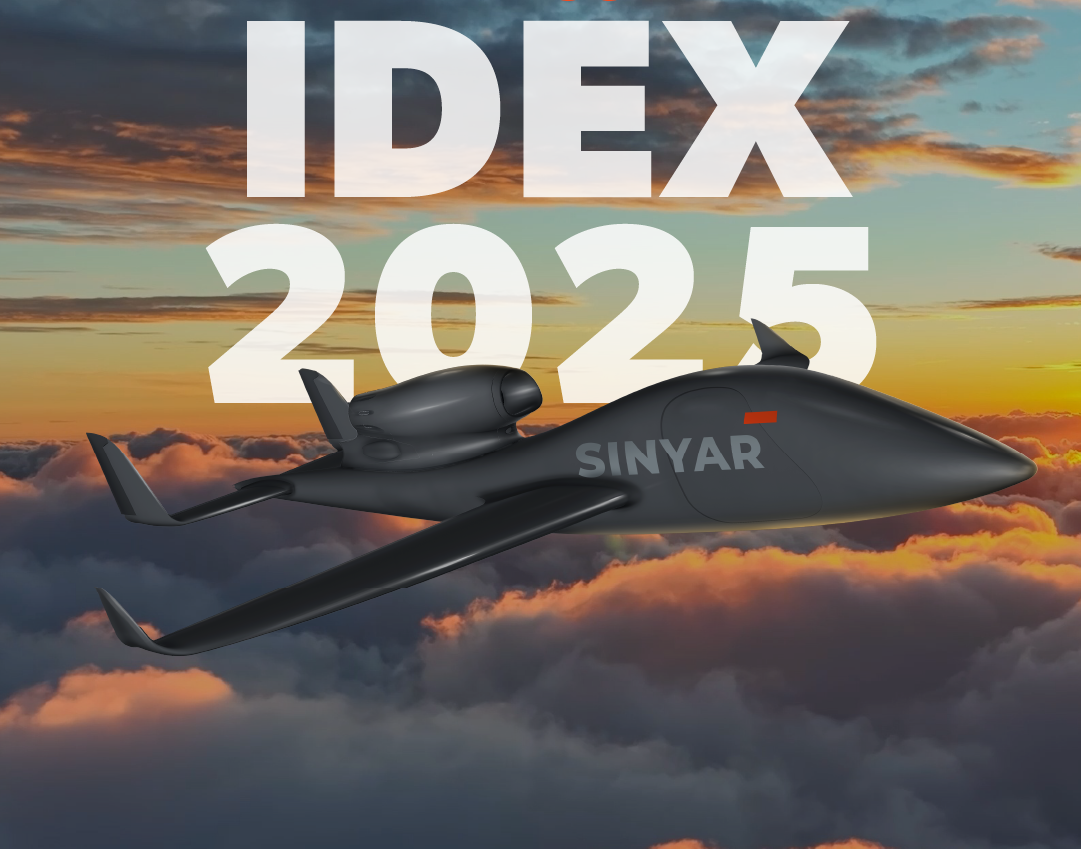
El otro drone interesante, el SINYAR-LAR3P, que ha mostrado en la exposición es el desarrollado de manera conjunta con la empresa polaca Flaris, basado en su reactor de negocios ligero (VLJ o Very Light Jet) LAR01, cuyo diseño de doble cola y montaje dorsal del motor recuerda al Heinkel He 162.

La historia de este UAV comenzó en 10 de noviembre de 2023, cuando EDGE GROUP anunció la adquisición del 50% de las acciones de FLARIS. Al mismo tiempo, en el Dubai Air Show 2023, se presentó el SINYAR LAR1, una plataforma no tripulada ISR (Inteligencia, Vigilancia y Reconocimiento) basada en el VLJ polaco. En IDEX 2025, se ha presentado el SINYAR LAR3P, también basado en el Flaris LAR01, y capaz de realizar misiones de ataque, además de ISR.

El fuselaje está fabricado en materiales compuestos, y pesa en vacío 850 kg, siendo la masa máxima al despegue (MTOW) de 2200 kg. Una vez lleno el tanque de combustible, quedan 610 kg para la carga útil real, a repartir entre sistemas y armas, transportadas en 4 puntos duros bajo las alas y, al menos algunas fuentes, hablan de una bodega interna. El motor es un Williams FJ5-33A, que proporciona un empuje de casi 8.5 kN y una velocidad de 650 km/h. Las alas se pueden desmontar fácilmente, por lo que toda la aeronave puede caber en un contenedor para su transporte en camión. Como capacidad heredada del VLJ original, puede operar desde pistas no pavimentadas.
En configuración ISR la autonomía del Sinyar LAR3P alcanza las 18 horas, con un alcance de 6,000 km, mientras que la altitud máxima es de 40000 pies.
Fuentes