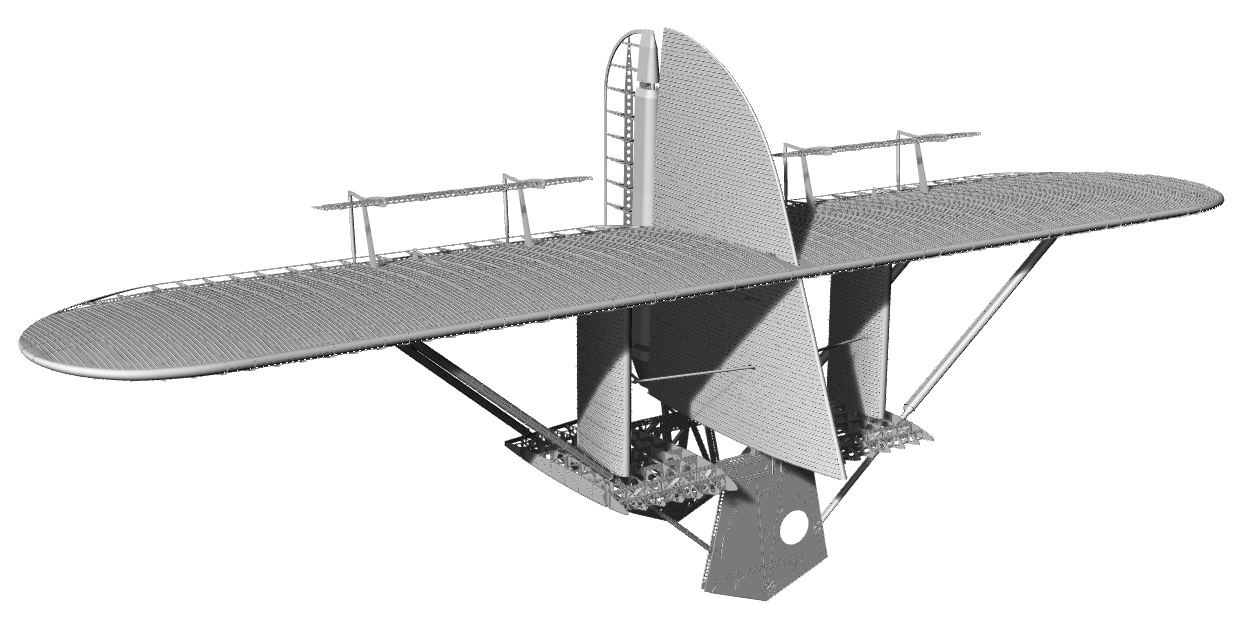
En 2021 os presentamos este proyecto de reconstrucción del Dornier Do X. Desde 2014, tras casi 8 años y 33600 horas invertidas por 112 estudiantes y Peter Kielhorn, un ex trabajador de Dornier, se empezó a fabricar la primera pieza, una gran cuaderna de 6 metros de alto y 4.6 de ancho.
Y se ha continuado con la viga principal de la aeronave. Tras la fabricación de la viga principal, se ha unido a la cuaderna que se había fabricado anteriormente, con lo que la estructura comienza a salir del plano de la cuaderna e invade la tercera dimensión, como dice uno de sus videos.
También se está trabajando con los instrumentos, y la obtención de planos de detalle del empenaje sigue a buen ritmo.
Esperamos tener pronto más noticias de este proyecto…
Ya sabéis que intentamos que nuestra frecuencia sea de dos al mes, pero últimamente con una actualidad tan convulsa hemos salido con más frecuencia y con análisis centrados en la actualidad. Aprovechamos que parece que esta semana está siendo más tranquila para retomar nuestro ritmo habitual, y sacar un episodio sobre bases aéreas subterráneas, después de nuestro episodio extra analizando el nuevo concepto de Loyal Wingman de Airbus.
¿Bases aéreas bajo tierra? Sí, ¿dónde mejor para no ser dañados por los ataques enemigos que bajo una montaña?¿no tendrá algún inconveniente grave? Carlos González y yo os contamos la historia de varias de estas bases y de paso las analizamos.
Por cierto, podéis ver una galería con fotos de bases subterráneas en Secret Projects.
pd: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utlizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast
El último Beluga XL que quedaba por entrar en servicio se ha unido al resto de sus hermanos este mes de junio.
Paradójicamente, el último Beluga XL en entrar en servicio no es el último en producirse, sino el primero pues, como es costumbre, el primero de la serie sirve de prototipo para encontrar los defectos y pulirlos, y que el resto de aeronaves se fabriquen ya sin ellos, o para realizar todas las pruebas de expansión de envolvente de vuelo, o… en definitiva, sirve de conejillo de indias para el resto de la flota.
Después de servir como plataforma de prueba del programa desde 2018, en junio de 2024 entró en servicio el último de los seis BelugaXL (BXL), uniéndose a sus cinco hermanos en Airbus Transport International (ATI), filial de Airbus, la aerolínea interna de la compañía desde 1996.
El BXL se basa en el A-330-200, posiblemente el avión más grande de Airbus que podía aterrizar sin problemas en la pista más pequeña de la compañía, y puede cargar un 30% más que su predecesor, el A-300-600 ST. Esa mayor capacidad de carga se traduce en menos vuelos para transportar la misma cantidad de piezas, o más piezas transportadas con los mismos vuelos, lo que redunda en menos costes, menos consumo de combustible y —claro— menos emisiones.
Conocimos a Flying Legends hace unos años, por su réplica a escala del Hurricane —que ha desaparecido de su web—, y por su réplica del Tucano.
El Embraer Tucano es un desarrollo brasileño, un avión de entrenamiento militar, también con desarrollos armados. Y, como de muchas otras aeronaves, existe una réplica en el mercado de los aviones de menos de 600kg.
Y este año, en FIDAE, se ha cerrado el círculo. De aeronave militar a réplica VLA/ULM (<600kg), a de nuevo aeronave militar.
El avión de construcción amateur, que el fabricante vende en kits para que el propietario monte en su garaje, ha sido la apuesta de la Fuerza Aérea Dominicana.
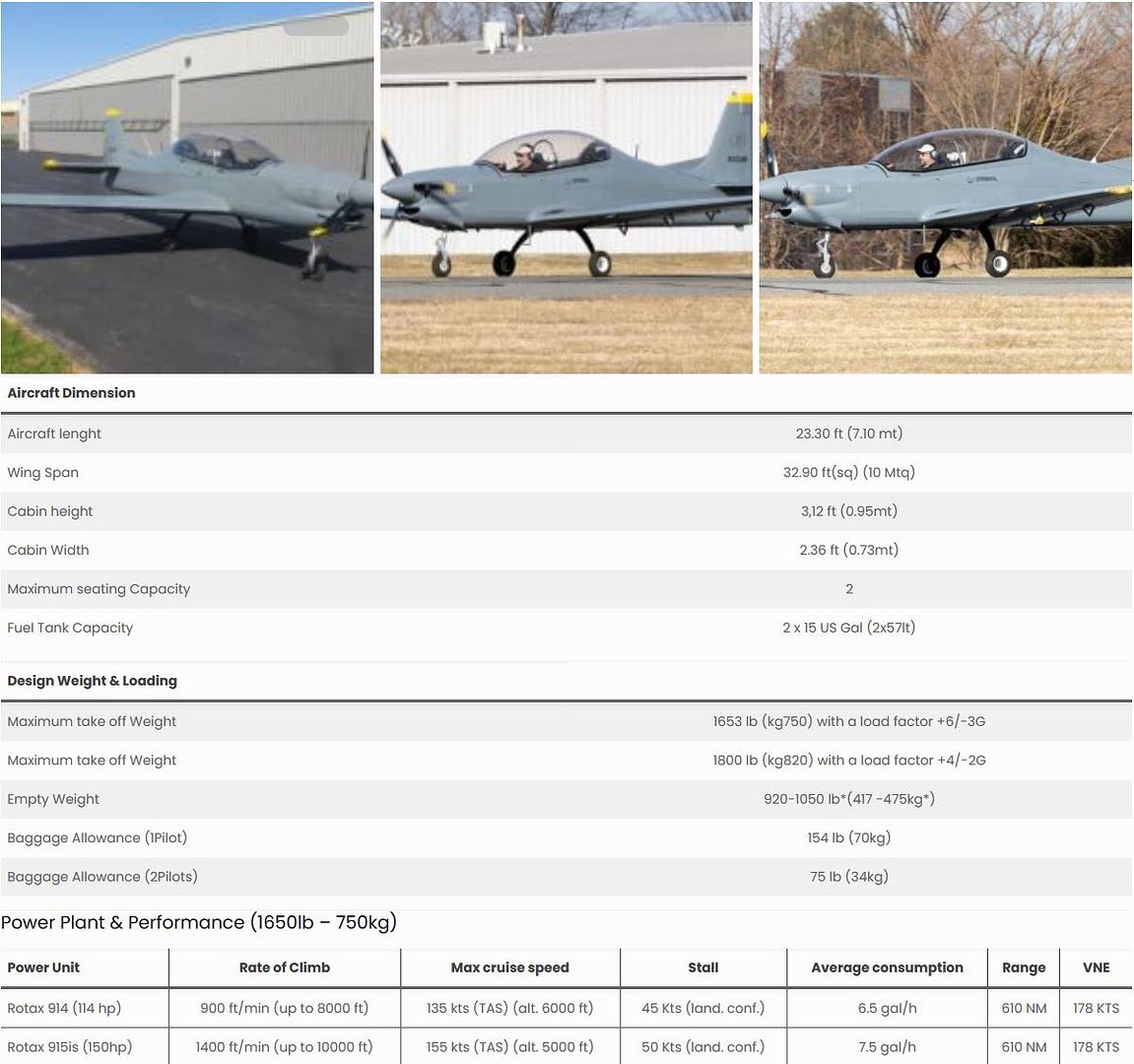
El avión se encuentra en la web del fabricante como TP-150 en dos versiones, tren fijo y retráctil. La Fuerza Aérea Dominicana lo denomina TP-75 DULUS.
El país caribeño adquirió diez kits, que han ensamblado y puesto en servicio.
El peso máximo al despegue de la versión militar se ha visto incrementado hasta los 750kg, y se encuentra con dos motorizaciones Rotax, 914 y 915is. Tiene capacidad para realizar acrobacia básica, una autonomía de 6h, una velocidad de crucero de 130 nudos, y un alcance de 500 millas náuticas
Recordemos que no es el primer ultraligero italiano que se pìensa utilizar como aeronave militar, el Blackshape fue probado como entrenador militar incluso embarcado.
El Flying Legend TP-150 fue diseñado con el objetivo de obtener un entrenador militar básico con bajos costes de mantenimiento. Totalmente fabricado en aluminio y con un robusto tren de aterrizaje, el avión es perfecto para formar nuevos pilotos tanto en pistas de hierba como de asfalto. Gracias al factor de carga +6/-3G, el avión realiza maniobras acrobáticas básicas y vuelos en formación, lo que lo convierte en un excelente entrenador.
La versión de la República Dominicana va equipada con un Rotax 915is de 150 CV, un sistema de recuperación balístico, y puede llevar tanques de combustible lanzables, para aumentar su autonomía. Además el país pretende instalar cámaras y sistemas de vigilancia y que pueda realizar misiones de control de fronteras.
La ergonomía de la cabina permite una buena visión para el instructor sentado detrás y el asiento trasero es ligeramente más alto que el delantero, lo que permite un fácil control del estudiante piloto.
Características del TP-150 de tren fijoCaracterísticas del TP-150 de tren retráctil / TP-75
Todas las potencias están desarrollando aeronaves no tripuladas de combate que entran dentro del concepto de Punto Fiel, o Lowal Wingman en inglés. Básicamente compañeros de vuelo no tripulados capaces de realizar las misiones que los pilotos humanos les asignen, multiplicando así la potencia de fuego de ataque, alejando al humano de la primera línea de fuego, y dándole ventaja respecto al adversario. Lo analizamos con Carlos González.
pd: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utlizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast