Hoy presentamos el segundo artículo para Sandglass Patrol de nuestro amigo Martín García García. ¡Esperemos que os guste!
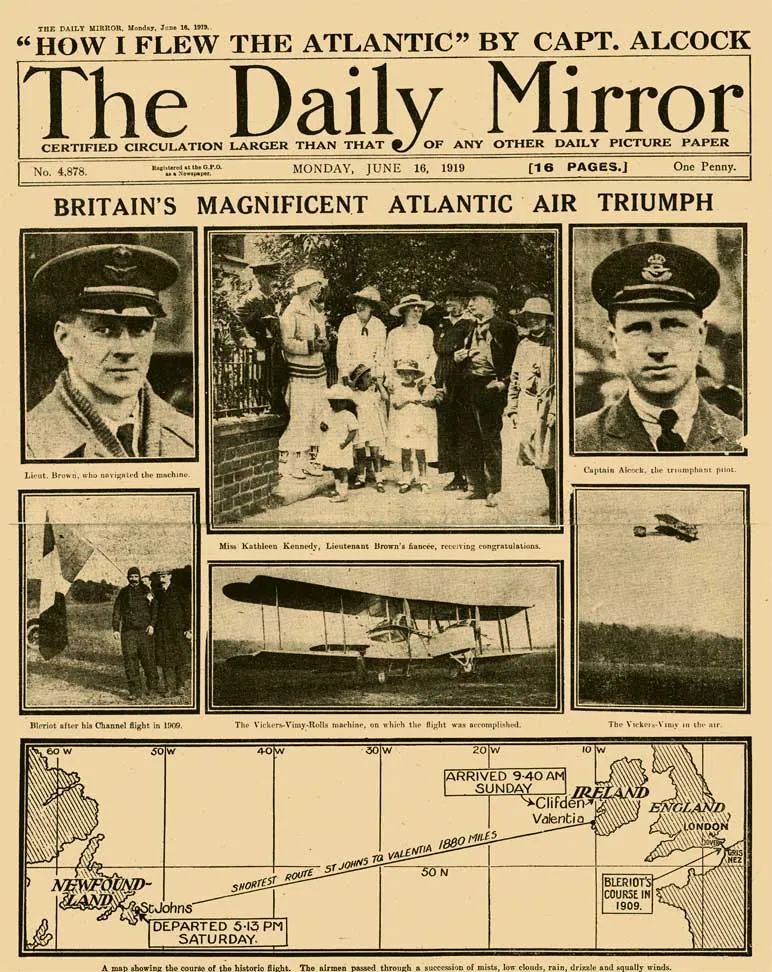
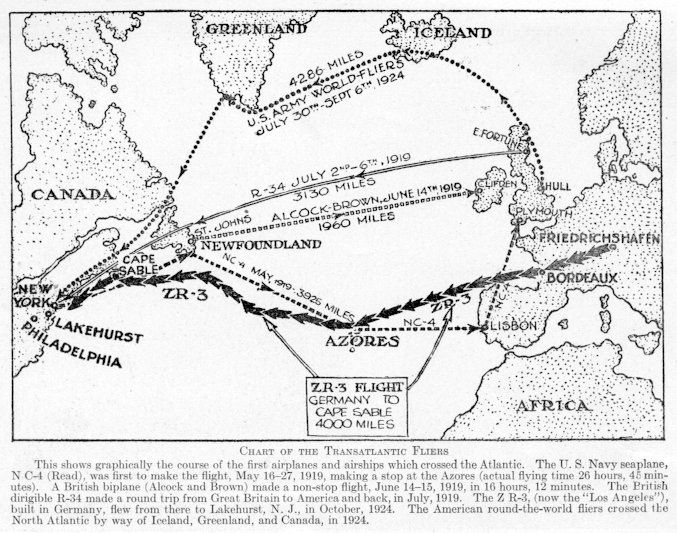
El 14 de junio de 1919, dos aviadores británicos, John Alcock y Arthur Whitten Brown, realizaron el primer vuelo trasatlántico sin escalas de la historia, cruzando el océano Atlántico desde Terranova hasta Irlanda en poco más de 16 horas. Fue una hazaña extraordinaria que demostró el potencial de la aviación para conectar continentes y acortar distancias.
En este artículo, repasaremos los antecedentes, los preparativos, el desarrollo y las consecuencias de este histórico vuelo, que marcó un hito en la historia de la aeronáutica y abrió el camino para futuros desafíos y exploraciones.
Antecedentes
La idea de cruzar el Atlántico en avión no era nueva. Desde principios del siglo XX, varios pioneros de la aviación habían intentado o planeado realizar esta proeza, pero se habían encontrado con numerosas dificultades técnicas, meteorológicas y logísticas, ¡incluso de falta de desarrollo de ayudas a la navegación y de instrumentos!. La Primera Guerra Mundial supuso un impulso para el desarrollo de la tecnología aeronáutica, pero también un freno para las aspiraciones civiles.
En 1913, el periódico británico Daily Mail ofreció un premio de 10.000 libras esterlinas al primer piloto que lograra cruzar el Atlántico en avión en menos de 72 horas. El premio quedó desierto durante la guerra, pero se reactivó en 1918, cuando el conflicto terminó y los aviones habían mejorado notablemente su rendimiento.
Varios equipos se lanzaron a la competencia, pero ninguno lo consiguió antes que Alcock y Brown. El primero en intentarlo fue el francés René Fonck(el as francés de la Primera Guerra Mundial, de la famosa escuadrilla de las Cigüeñas) , que despegó de Nueva York el 21 de septiembre de 1918 con un avión Sikorsky S-35 cargado de combustible y tres pasajeros. Sin embargo, el aparato era demasiado pesado y se estrelló al poco de despegar, causando la muerte de dos ocupantes.
El del estadounidense Albert Read, que salió de Rockaway (Nueva York) el 8 de mayo de 1919 con un hidroavión Curtiss NC-4 también lo intentó. Su ruta incluía escalas en Nueva Escocia, Terranova, Azores, Lisboa y Plymouth. A pesar de los problemas mecánicos y las condiciones meteorológicas adversas, logró completar el viaje el 31 de mayo de 1919, convirtiéndose en el primero en cruzar el Atlántico en avión, pero con escalas.
Alcock y Brown, el triunfo de los ex-prisioneros de guerra
John Alcock (1892-1919) era un piloto experimentado que había servido en la Royal Air Force durante la guerra. Había sido derribado y capturado por los alemanes en 1917, pero logró escapar al año siguiente. Tras el armisticio, se interesó por el premio del Daily Mail y se asoció con la empresa Vickers Limited, que le proporcionó un avión modificado para la ocasión: un Vickers Vimy.
Arthur Brown (1886-1948) era un ingeniero naval que había trabajado como observador y navegante aéreo durante la guerra. Había sido derribado dos veces y también había sido prisionero de los alemanes. Tras su liberación, se dedicó a estudiar las técnicas de navegación astronómica aplicadas a la aviación. Se unió al proyecto de Alcock como copiloto y navegante.
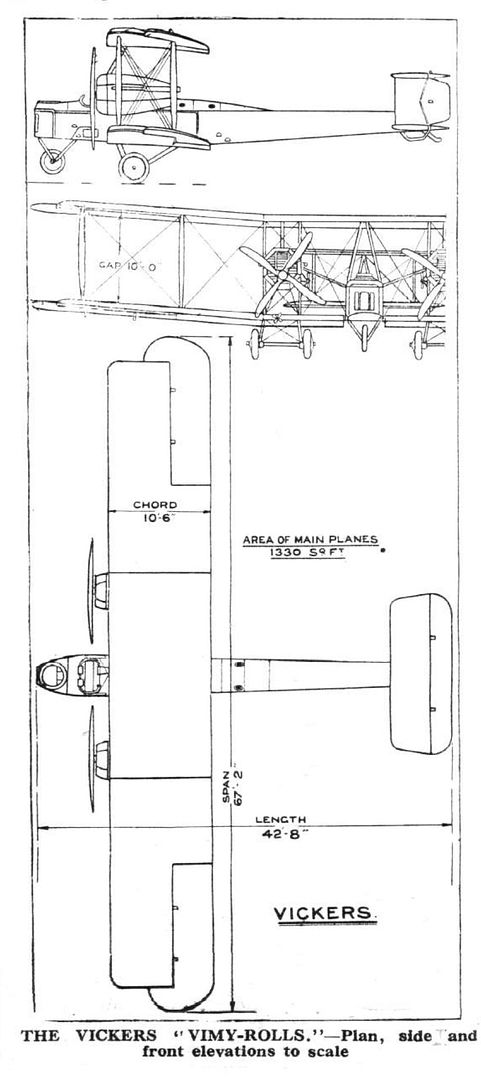
El Vickers Vimy era un bombardero pesado bimotor que había sido diseñado para la Primera Guerra Mundial, pero que no llegó a entrar en combate. Tenía una envergadura de 20 metros, una longitud de 13 metros y una altura de 4 metros. Podía alcanzar una velocidad máxima de 166 km/h y una altitud de 4.300 metros. Tenía capacidad para cuatro tripulantes y podía transportar hasta 1.000 kg de bombas.
Para adaptarlo al vuelo trasatlántico, se le hicieron varias modificaciones, como reforzar el fuselaje, ampliar el depósito de combustible, instalar un sistema de calefacción y un radioteléfono, y eliminar las ametralladoras y la bahía de bombas. El peso total del avión era de 6.000 kg, de los cuales 3.600 kg eran de combustible.
Alcock y Brown eligieron como punto de partida la localidad de St. John’s, en Terranova, que era el lugar más cercano a Europa desde el continente americano. Allí se encontraron con otros competidores, como el británico Harry Hawker y el australiano Harry Kauper, que también habían llegado con un avión Sopwith Atlantic. Sin embargo, su intento fracasó el 18 de mayo de 1919, cuando tuvieron que amerizar cerca de las Azores debido a una avería en el motor.
Alcock y Brown tuvieron que esperar varios días hasta que el clima les permitió despegar. Mientras tanto, prepararon el avión y estudiaron las rutas posibles. Decidieron volar hacia el este, aprovechando los vientos favorables, y seguir una latitud constante de 52 grados norte. Su destino era Irlanda, que era la primera tierra firme que encontrarían en su camino.
Y por fin, el despegue
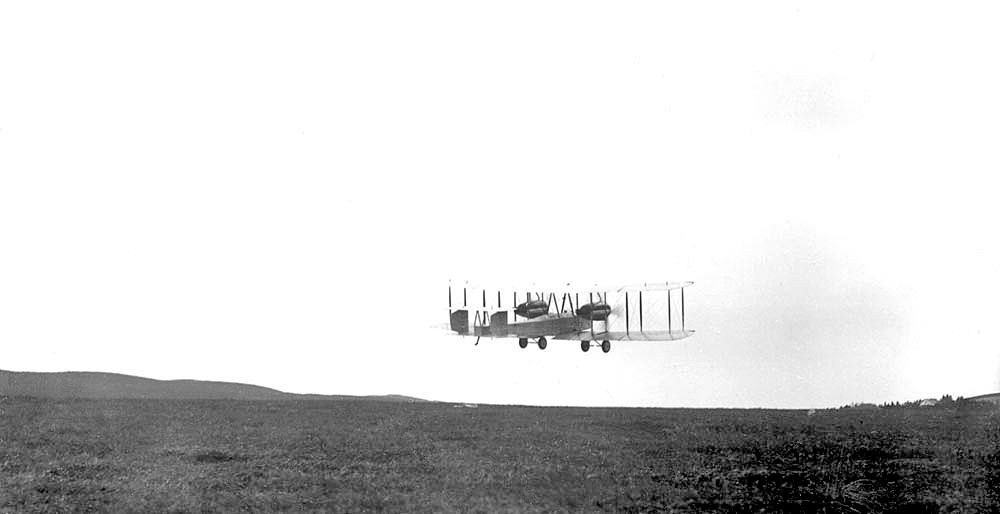
El 14 de junio de 1919, a las 13:45 hora local (16:15 GMT), Alcock y Brown despegaron del campo de Lester’s Field, en St. John’s, con su Vickers Vimy cargado hasta los topes de combustible. El despegue fue difícil, ya que el avión apenas tenía margen para elevarse sobre los árboles y los cables telegráficos. Además, el cielo estaba nublado y la visibilidad era escasa.
Durante las primeras horas del vuelo, Alcock y Brown tuvieron que enfrentarse a varios problemas: la brújula se averió, el radioteléfono dejó de funcionar, el parabrisas se empañó y se congeló, además de que el colector de escape del motor derecho se rompió, generando un ruido insoportable e imposibilitando que ambos aviadores pudieran hablar entre ellos. A pesar de todo, lograron mantener el rumbo y la altitud, guiándose por el sol cuando podían verlo o por la navegación astronómica cuando estaba oscuro.
La noche fue especialmente dura, ya que tuvieron que atravesar una tormenta, y tuvieron que perder altura para deshacer el hielo que se había formado sobre las alas. El avión no sólo se llenó de hielo, los instrumentos se volvieron inútiles. Alcock tuvo que pilotar a ciegas, confiando en su instinto y en la experiencia de Brown. Por suerte, lograron salir de la tormenta y recuperar el control del avión.
Al amanecer del 15 de junio de 1919, Alcock y Brown divisaron por fin la costa irlandesa. Habían volado unos 3.000 km en poco más de 16 horas, a una velocidad media de 185 km/h. Buscaron un lugar adecuado para aterrizar y vieron un campo verde que les pareció idóneo. Sin embargo, era un terreno blando.
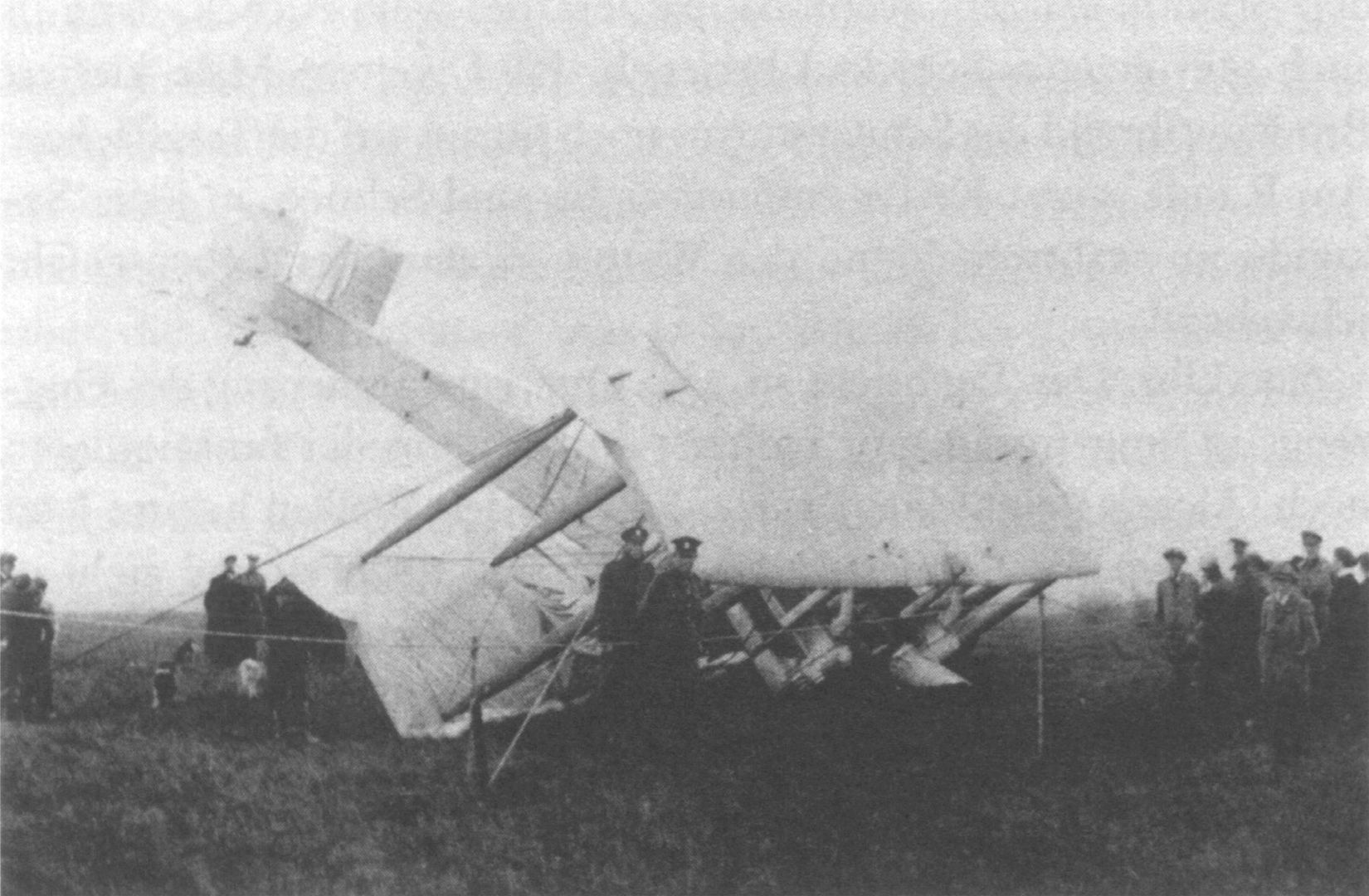
El avión tocó tierra a las 8:40 hora local (7:40 GMT), pero se hundió en el barro y capotó, dañando el morro y las hélices. Afortunadamente, Alcock y Brown salieron ilesos del accidente y fueron recibidos los habitantes locales que les ayudaron a salir del avión.
Alcock y Brown habían logrado su objetivo: habían cruzado el Atlántico sin escalas por primera vez en la historia, batiendo todos los récords anteriores. Habían demostrado que era posible volar sobre el océano con un avión convencional y sin ayuda externa. Habían hecho historia.
Consecuencias

La noticia del vuelo de Alcock y Brown se difundió rápidamente por todo el mundo, causando admiración y asombro. Los dos aviadores fueron aclamados como héroes y recibieron numerosos honores y reconocimientos.
Después de recibir el premio de 10.000 libras de manos del futuro Primer Ministro Winston Churchill, los aviadores insistieron que los mecánicos de Vickers y Rolls-Royce que habían colaborado con ellos recibieran 2.000 libras
Unos días más tarde fueron nombrados Caballeros por el Rey Jorge V.
El tercer y cuarto tripulantes
Como curiosidad, no hicieron solos el viaje, había otros dos ocupantes en el avión, un pasajero llamado Twinkletoe y otro llamado Lucky Jim, unos gatos de peluche… que actualmente puede verse en el Museo de la RAF, en Cosford.
Y después…
En Octubre, Arthur Whitten-Brown se casó y se fue a Estados Unidos por su luna de Miel.
Desgraciadamente, John Alcock no pudo disfrutar de los reconocimientos otorgados mucho tiempo.
El 18 de Diciembre de 1919 despegó de Londres en pésimas condiciones meteorológicas en un vuelo de entrega de un nuevo Vickers Viking anfibio rumbo a París para la primera exposición aeronáutica tras la Gran Guerra.
Debido a la espesa niebla, tras cruzar el Canal de la Mancha se estrelló en un campo cerca del pueblo francés de Rouen donde fue rescatado por un granjero local, inconsciente y malherido.
Para cuando los médicos llegaron al lugar, Alcock había fallecido a casa de las graves lesiones.
Fue despedido con honores militares, Arthur W. Brown se enteró estando en San Francisco, reaccionando con un clásico: “La muerte de Alcock fue un sacrificio por toda la humanidad”