Venimos hablando del futuro de los aviones de combate no tripulados controlados por líderes humanos, bautizados como loyal-wingman, punto fiel o MUM-T desde hace un tiempo. Poco a poco se han ido sumando a estos desarrollos más países, y el último en anunciarlo ha sido Corea del Sur, hoy mismo.
Emiratos Arabes, como Turquía o Corea, llevan un tiempo invirtiendo muchos recursos en crear una industria de defensa, y aeronáutica que es lo que nos ocupa en este blog, y en su última feria de defensa IDEX 2025, que se está celebrando esta semana, su compañía EDGE ha presentado todas sus novedades
Los productos aeronáuticos desarrollados por EDGE se pueden dividir en tres grandes grupos, por lo que hemos podido ver en su página web. Bien aeronaves convencionales, muy buenas plataformas existentes, dronizadas; bien desarrollos conjuntos con empresas occidentales, start-ups o pymes, en las que invierte o las adquiere parcialmente. Bien versiones bajo licencia.
Por ejemplo, EDGE ha presentado su propio modelo del dron turco Bayraktar TB-2, bajo el nombre de REACH-M. Han presentado 3 uavs kamikazes:
el HUNTER 2-S, con un alcance de 50km, una carga explosiva de 2kg y una autonomía de 45min, a 90km/h.
El Hunter-10, con una cabeza explosiva de 10kg y un peso máximo al despegue de 50. Con alas plegables, se puede transportar en contenedores-lanzadores múltiples instalados sobre vehículos blindados Ajban 441AE.
Más llamativo y fuera de lo común es el helicóptero HT-750, desarrollado de forma conjunta entre EDGE y la Anavia. Se trata de un helicóptero no tripulado de gran tamaño, con una masa máxima al despegue de 1150 kg, una carga de pago de 750kg, y una velocidad máxima de 220 km/h. El diseño es modular, pues el helicóptero está concebido entorno a un exoestructura que contiene todos los sistemas necesarios para hacerlo volar de forma autónoma, y una «cabina» desmontable e intercambiable configurable para distintas misiones, como carga o ISR.
EDGE, como desarrollo de su subsidiaria ADASI, presentó el UCAV JENIAH, un reactor de combate que alcanza velocidades de crucero de M0.7 y que entra en la misma categoría que el turco Kizilelma y otros similares, posiblemente con idea de que pueda llegar a ser operado en enjambres controlados desde un «pastor de drones» o haciendo equipo con otras aeronaves tripuladas. Está construido con tecnología furtiva, según el fabricante, incluida una bodega interna de bombas. Su peso máximo de despegue supera los 4,000 kg, y su carga útil de 480 kg permite realizar una amplia variedad de misiones, como reconocimiento, vigilancia, reconocimiento de áreas y ataques precisos a objetivos de alta prioridad.
El otro drone interesante, el SINYAR-LAR3P, que ha mostrado en la exposición es el desarrollado de manera conjunta con la empresa polaca Flaris, basado en su reactor de negocios ligero (VLJ o Very Light Jet) LAR01, cuyo diseño de doble cola y montaje dorsal del motor recuerda al Heinkel He 162.
La historia de este UAV comenzó en 10 de noviembre de 2023, cuando EDGE GROUP anunció la adquisición del 50% de las acciones de FLARIS. Al mismo tiempo, en el Dubai Air Show 2023, se presentó el SINYAR LAR1, una plataforma no tripulada ISR (Inteligencia, Vigilancia y Reconocimiento) basada en el VLJ polaco. En IDEX 2025, se ha presentado el SINYAR LAR3P, también basado en el Flaris LAR01, y capaz de realizar misiones de ataque, además de ISR.
El fuselaje está fabricado en materiales compuestos, y pesa en vacío 850 kg, siendo la masa máxima al despegue (MTOW) de 2200 kg. Una vez lleno el tanque de combustible, quedan 610 kg para la carga útil real, a repartir entre sistemas y armas, transportadas en 4 puntos duros bajo las alas y, al menos algunas fuentes, hablan de una bodega interna. El motor es un Williams FJ5-33A, que proporciona un empuje de casi 8.5 kN y una velocidad de 650 km/h. Las alas se pueden desmontar fácilmente, por lo que toda la aeronave puede caber en un contenedor para su transporte en camión. Como capacidad heredada del VLJ original, puede operar desde pistas no pavimentadas.
En configuración ISR la autonomía del Sinyar LAR3P alcanza las 18 horas, con un alcance de 6,000 km, mientras que la altitud máxima es de 40000 pies.
El seis de febrero de 2025 Irán nos sorprendía con la presentación de su nuevo buque porta-drones, basado en un portacontenedores. De haberlo hecho un poco antes lo habríamos metido en nuestro análisis de los UAVs SiRTAP, Mojave y TB3 embarcados. Pero como llegaron tarde para ese episodio del podcast y hoy es el día de la radio, hemos decidido regalaros un episodio extra hablando de los porta-drones chinos e iraníes, así como de las aeronaves no tripuladas que pueden llevar, y un mini-análisis de para qué pueden utilizarlos. ¿Nos acompañáis?
P.D.: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utilizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast
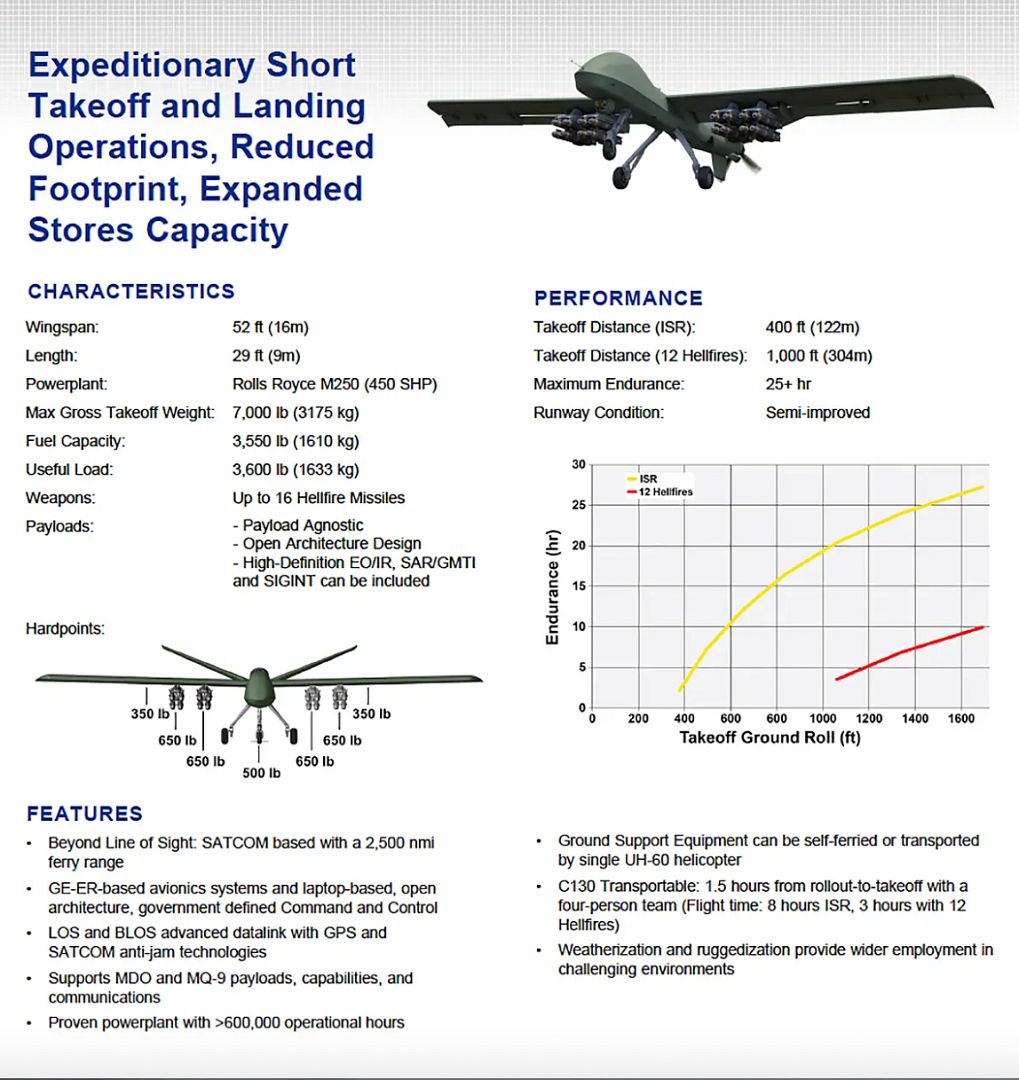
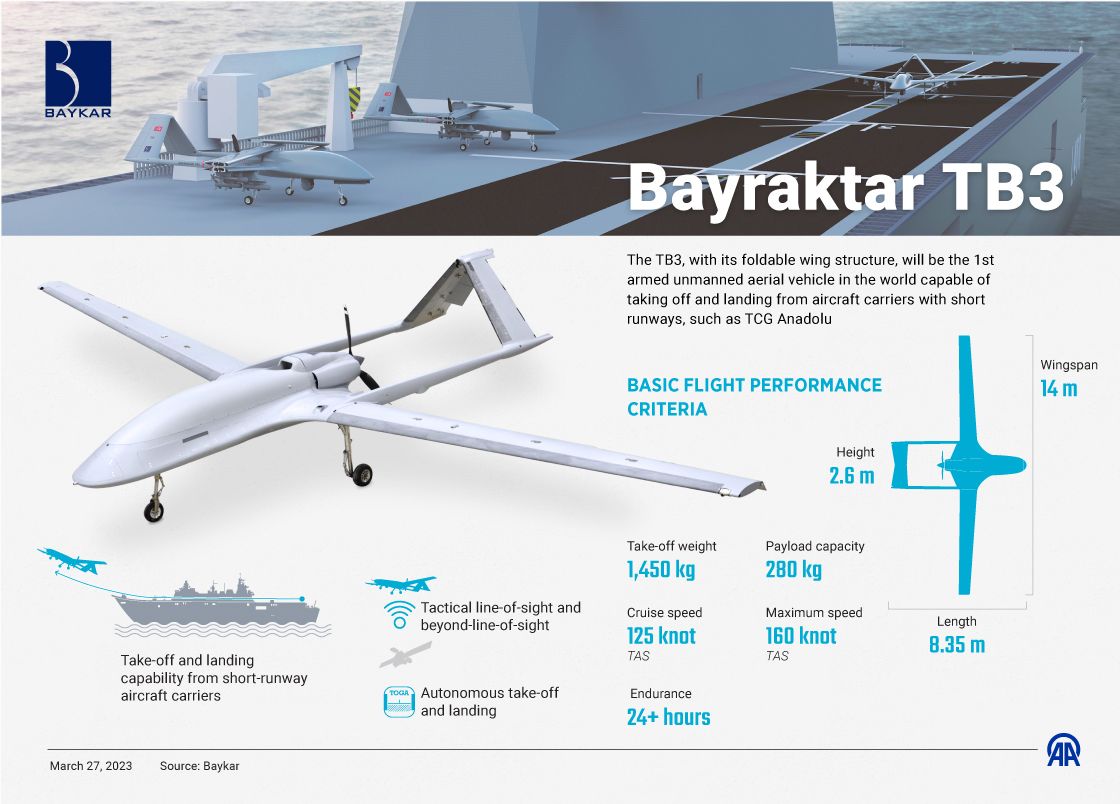
Solo hay tres grandes drones modernos que se hayan anunciado que pueden ser embarcados. Dos, el estadounidense Mojave y el turco TB-3 ya están realizando pruebas. El tercero, el español SiRTAP, no ha volado aún, pero es lógico que se intente embarcar.
No es la primera vez que hablamos en el podcast de aviones no tripulados y portaaeronaves. De hecho, hicimos el analisis del Anadolu, cuando Turquía presumía de tener el primer portadrones. También hemos cubierto ampliamente el Mojave, un avión basado en el Reaper, con capacidades STOL y, desde hace poco, embarcadas. Así como del interés de las armadas española y portuguesa por los buques portadrones.
Así que, cuando se anunció la firma del memorandum de entendimiento entre Airbus y Navantia para estudiar la viabilidad de embarcar el SiRTAP, no podíamos hacer otra cosa que echarle un ojo a los datos publicados, y compararlos con los datos disponibles del Mojave y del TB-3… ¿Nos acompañáis a Carlos y a mi en esta charla?
P.D.: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utilizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast
Airbus y Navantia hanfirman un acuerdo para explorar la integración de SiRTAP en el buque insignia de la Armada Española. Este acuerdo tiene como objetivo ser el primer paso para garantizar la interoperabilidad de SiRTAP con el resto de los sistemas del portaaviones, como el sistema de combate SCOMBA.
Las actividades de integración se centrarán en los siguientes pilares:
Mando y control (C2)
Integración del sistema de combate
Soporte a la navegación (incluidas las operaciones de despegue y aterrizaje)
El acuerdo ha sido anunciado hoy por Airbus en Linkedin, y ha sido firmado en Rota por representantes de ambas empresas, con presencia de personal de la Armada.
El SiRTAP es el último desarrollo de un avión completo que ha realizado Airbus en España desde el C-295, y que parece heredero —al menos en cuanto a la arquitectura de la aeronave se refiere— del ATLANTE II.
Recurre a la configuración clásica de motor trasero, con FLIR y, presumiblemente, SATCOM y RADAR en el morro, como el Hermes o el Predator. Sus características generales se pueden encontrar en la infografía que se puede encontrar aquí debajo, y en la web de Airbus en forma de pdf.
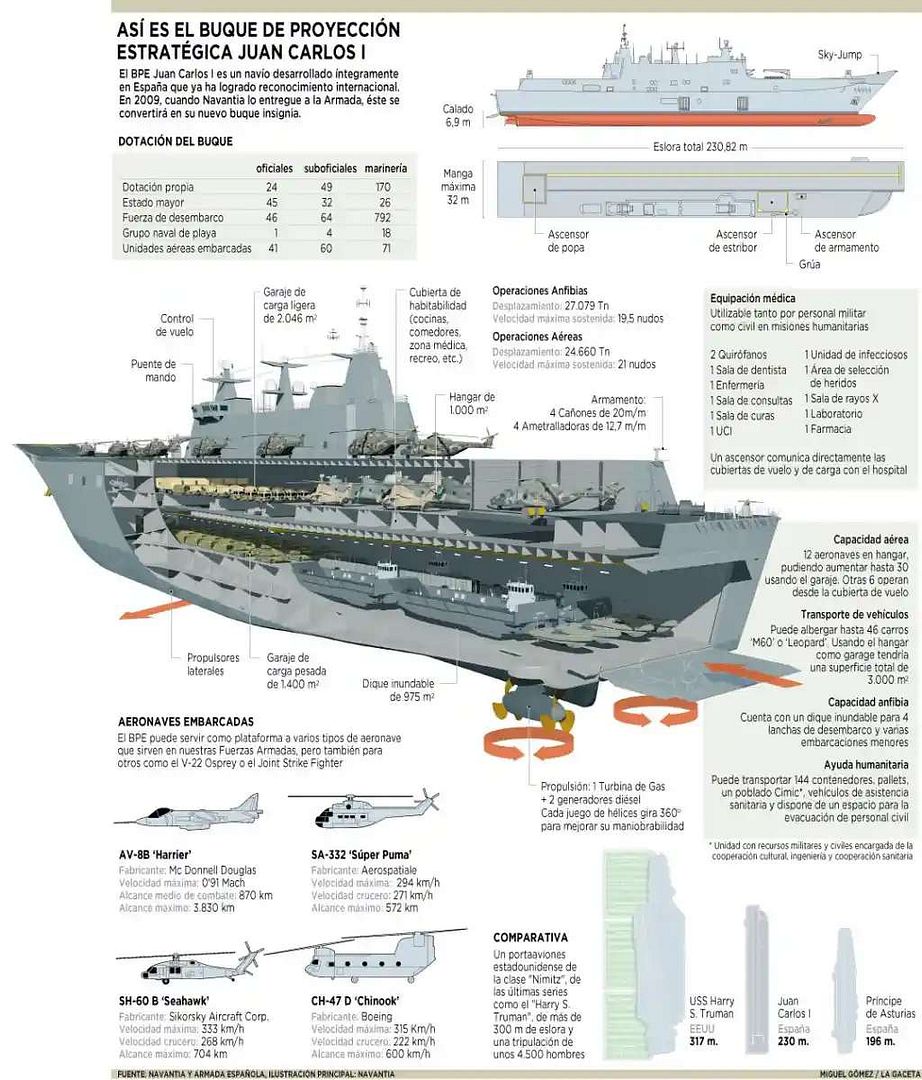
Infografía con los datos del SiRTAPInfografía con las capacidades del Juan Carlos I vía Va de Barcos
Airbus y Navantia firman un acuerdo para explorar la integración de SIRTAP en el LHD Juan Carlos I
Navantia y Airbus Defence and Space han firmado un Memorando de Entendimiento (MoU) para explorar la integración del sistema aéreo remotamente tripulado SIRTAP, de Airbus, con el LHD Juan Carlos I, desarrollado por Navantia. Este acuerdo pretende ser el primer paso para garantizar la interoperabilidad de la plataforma SIRTAP con el resto de sistemas del LHD, como el sistema de combate SCOMBA.
Las labores de integración se centrarán en tres pilares: mando y control (C2), integración del sistema de combate y apoyo a la navegación, con especial atención a las operaciones de despegue y aterrizaje.
Este esfuerzo conjunto pretende lograr un sistema totalmente integrado asegurando una absoluta compatibilidad entre el SIRTAP y el LHD Juan Carlos I, aumentando sus capacidades de misión, flexibilidad operativa y eficacia general de ambas plataformas en diversos escenarios operativos.
Firma del acuerdo entre Airbus y Navantia en Rota
Este acuerdo podría marcar el camino para ofrecer a la Armada capacidades adicionales desarrolladas en España, potenciando la industria nacional y en beneficio de su soberanía estratégica. Asimismo, la presentación de SIRTAP a bordo del buque insignia demuestra el compromiso de la Armada con la industria de defensa nacional como capacidad estratégica.
El Ministerio de Defensa se convirtió en el cliente lanzador de SIRTAP a finales de 2023 con la adquisición de nueve sistemas para reforzar las capacidades tácticas del Ejército de Tierra y del Ejército del Aire y del Espacio.
El primer prototipo de SIRTAP se está construyendo en las instalaciones de Airbus en Getafe (Madrid) y se espera que comience su campaña de ensayos en vuelo a finales de 2025.