Los Juegos Olímpicos de Verano de 1900 (en francés: Jeux olympiques d’été de 1900), hoy conocidos oficialmente como Juegos de la II Olimpiada (Jeux de la IIe olympiade), fueron un acontecimiento polideportivo internacional que tuvo lugar del 14 de mayo al 28 de octubre de 1900. No se celebraron ceremonias de inauguración ni de clausura. Ni se entregaron medallas.
Un poco de historia, y por qué se celebraron en 1900 en París
En el Congreso Olímpico de 1894, convocado en el edificio de la Sorbona, Pierre de Coubertin propuso que los Juegos Olímpicos se celebraran en París en 1900. Sin embargo, los delegados del congreso no estaban dispuestos a esperar seis años y presionaron para que los primeros se celebraran en 1896. Se tomó, por tanto, la decisión de celebrar los primeros en Atenas y que París acogiera los segundos.
Los Juegos de 1900 se celebraron en el marco de la Exposición Universal de 1900 (los de 1904 se celebrarían en San Luis, también durante la Exposición Universal). El Barón de Coubertin creía que esto ayudaría a dar a conocer los Juegos Olímpicos y presentó elaborados planes para replicar el antiguo emplazamiento de Olimpia, con estatuas, templos, estadios y gimnasios. El director de la Exposición Universal, Alfred Picard, consideró que celebrar un acontecimiento deportivo antiguo en la Exposición Universal era un «anacronismo absurdo». Tras agradecer a de Coubertin sus planes, Picard los archivó y no se volvió a saber nada más de ellos.
Se constituyó un comité para la organización de los Juegos, compuesto por algunos de los más hábiles administradores deportivos de la época, y se elaboró un programa provisional. Los deportes que se incluirían en los Juegos eran:
- atletismo
- natación
- lucha
- gimnasia
- esgrima
- boxeo francés y británico
- regatas fluviales y oceánicas
- ciclismo
- golf
- salvamento (tanto en el agua como en incendios, o heridos militares y civiles en tierra)
- tiro con arco
- halterofilia
- remo
- submarinismo
- waterpolo.
Las asociaciones deportivas británicas e irlandesas anunciaron su deseo de competir, al igual que varias poderosas universidades y clubes deportivos estadounidenses. Competidores de Rusia y Australia también confirmaron su intención de viajar a París.
El 9 de noviembre de 1898, la Union des Sociétés Françaises de Sports Athlétiques («Unión de Sociedades Francesas de Deportes Atléticos» o USFSA) anunció que tendría derecho exclusivo sobre cualquier deporte organizado durante la Exposición Universal. Fue una amenaza vacía, pero el vizconde Charles de La Rochefoucauld, designado jefe del comité organizador, renunció antes que verse envuelto en una batalla política. El Barón de Coubertin, que también era secretario general de la USFSA, fue instado a retirarse de la participación activa en la organización de los Juegos y así lo hizo, sólo para comentar más tarde: «Me rendí – y me equivoqué al hacerlo».
El COI cedió el control de los Juegos a un nuevo comité que debía supervisar todas las actividades deportivas relacionadas con la Exposition Universelle de 1900. Alfred Picard nombró presidente de esta organización a Daniel Mérillon, en febrero de 1899. Mérillon procedió a publicar un programa de pruebas totalmente diferente, con el resultado de que muchos de los que habían hecho planes para competir de acuerdo con el programa original se retiraron y se negaron a tratar con el nuevo comité.
Por todo esto, algunos historiadores olímpicos argumentan que las jornadas deportivas de 1900 no son auténticos Juegos Olímpicos. Los primeros modernos se celebraron en 1896 en Atenas, organizados por Pierre de Coubertin y el Comité Olímpico Internacional (COI). El evento de 1900 se tituló oficialmente Concours Internationaux d’Exercices Physiques et de Sports y fue planeado por Daniel Merillon, el presidente de la Federación Francesa de Tiro, no por el COI, por lo que podría argumentarse que 1900 no fue un evento sancionado por el COI. De hecho, jamás se usaron en ningún cartel las palabras «Juegos Olimpicos».
Las competiciones de la Exposición se celebran en lugar de los Juegos Olímpicos de 1900 y cuentan como equivalentes a la II Olimpiada. Pierre de Coubertin
Algunas pruebas se disputaron por primera (y algunas también por última) vez en la historia de los Juegos, como «deportes de exhibición», que diríamos hoy en día:
- pesca con caña
- automovilismo
- balonmano
- críquet
- croquet
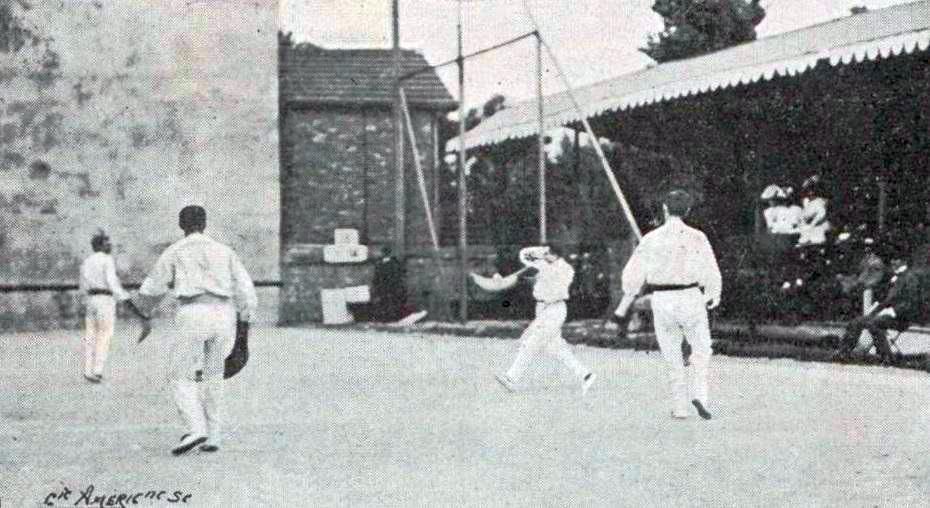
- pelota vasca
- natación 200m con obstáculos
- Colombofilia
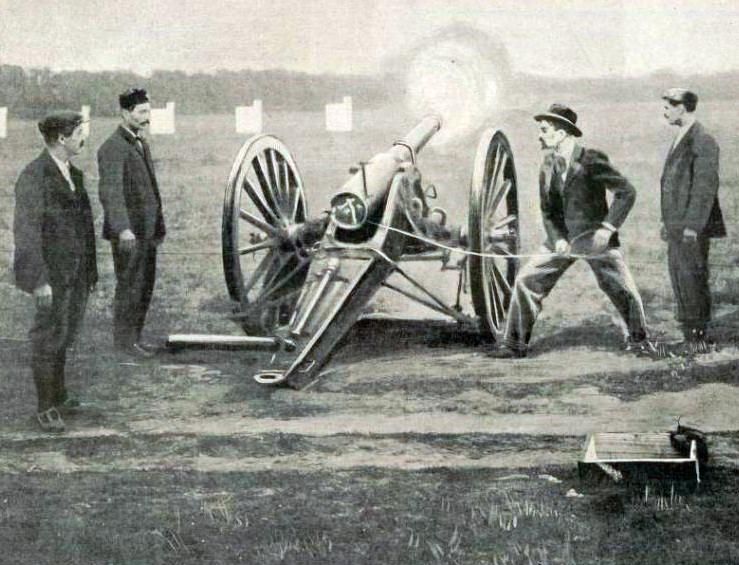
- Tiro con cañón de 90mm
- Aerostación y cometas
También fueron los únicos Juegos Olímpicos de la historia en los que se utilizaron animales vivos (palomas) como blancos durante la prueba de tiro.
Aerostación enlos Juegos Olímpicos
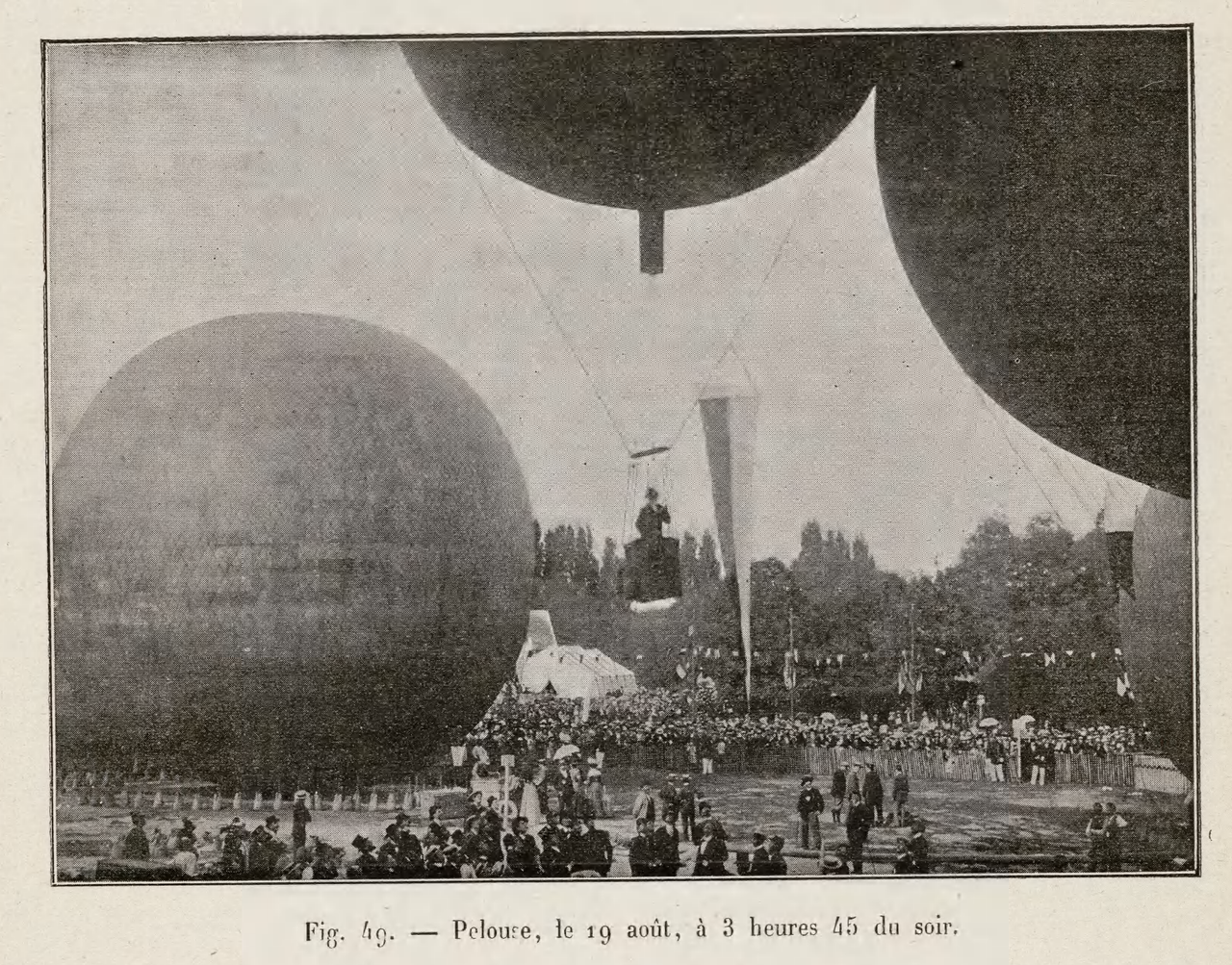
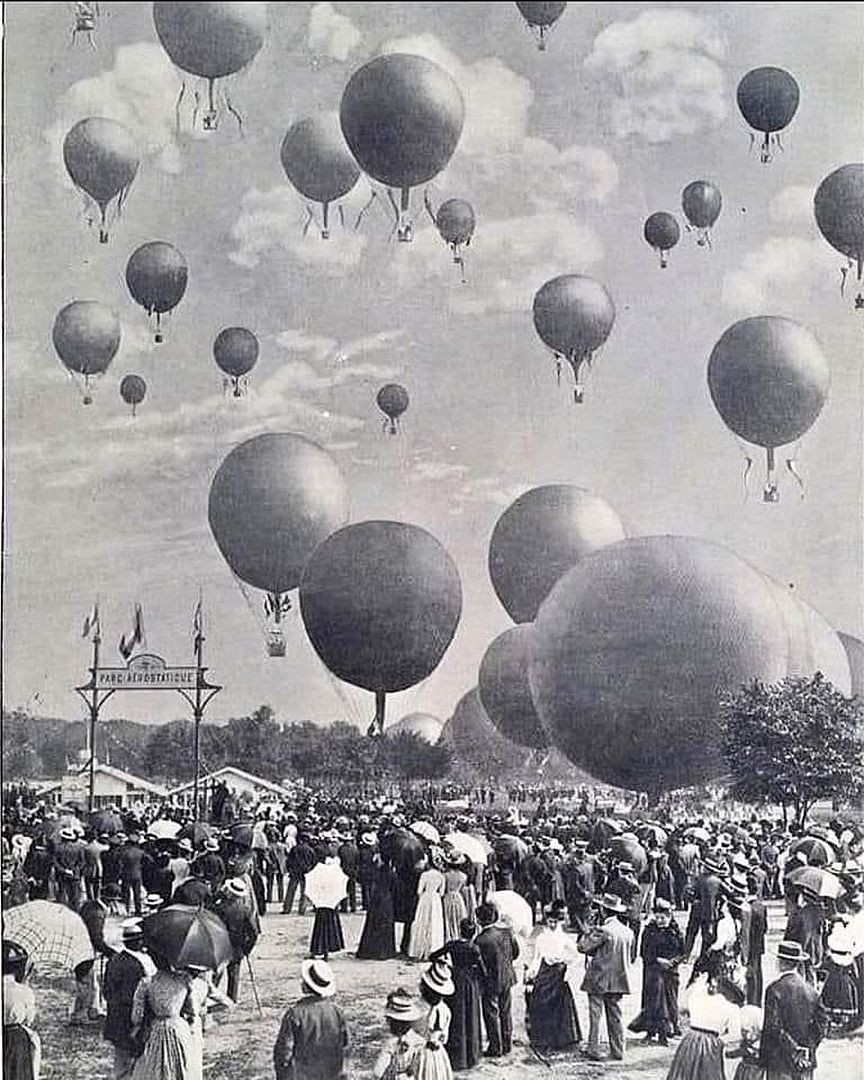
Durante los segundos juegos se celebraron 24 pruebas de vuelo en globo más tres de cometas. En ellas participaron hombres y mujeres.
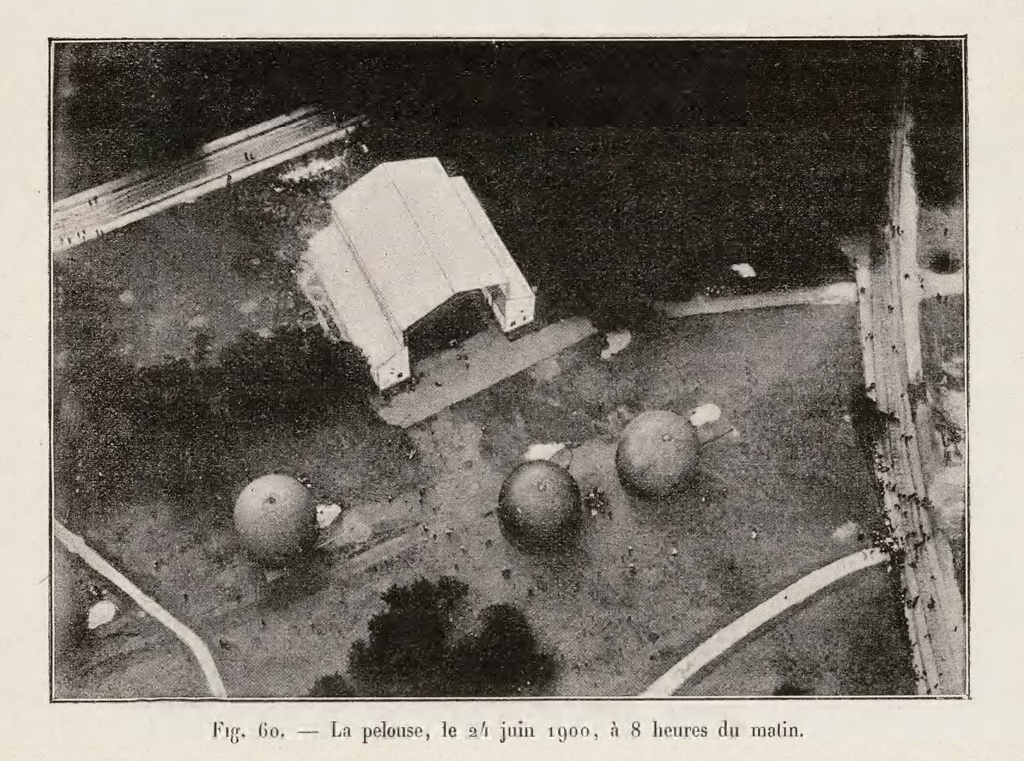
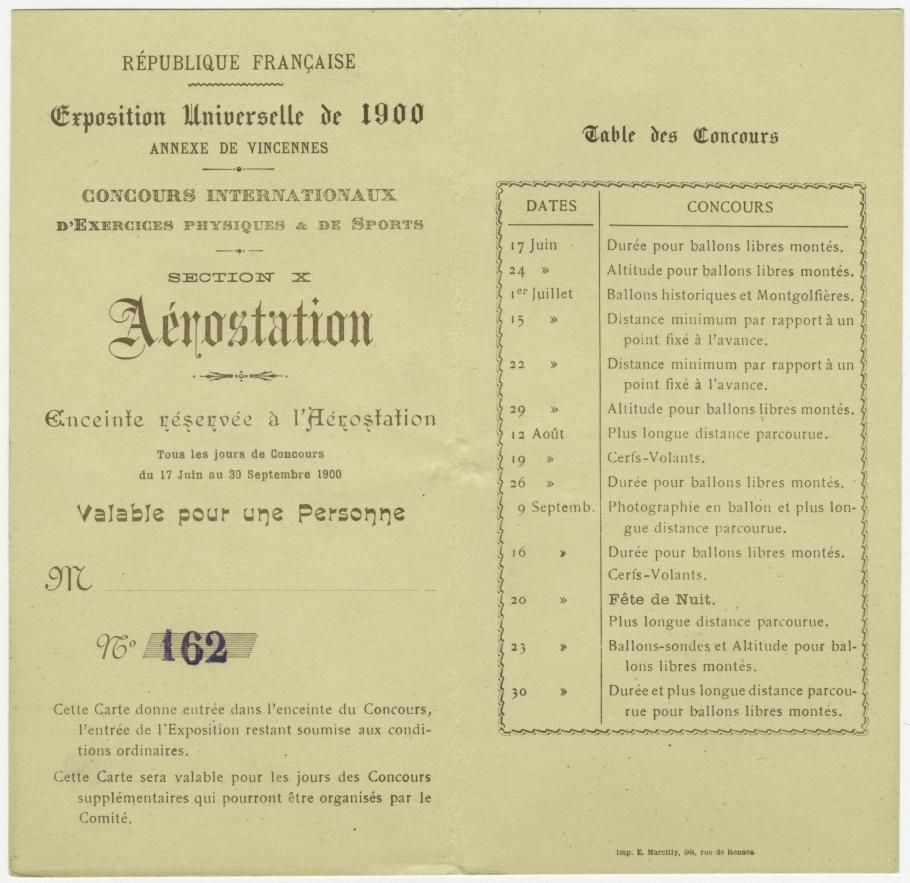
Todas las pruebas comienzan en la Parque de aerostación de Vincennes, en París. Una entrada emitida para estos eventos era válido para todos los días programados de competición. El titular del boleto obtenía entrada a los terrenos de la misma y entrada a la Exposición para los días de cualquier concurso que pudiera ser organizado por el Comité.
El programa incluía competiciones para globos libres (de gas) (distancia, altitud, duración, distancia mínima desde un punto fijado de antemano, mayor distancia recorrida y fotografía desde un globo), globos meteorológicos (de sondeo) y cometas; un evento que involucraba «globos históricos y Montgolfières» (globos de aire caliente); y una celebración nocturna (Fête de Nuit).
La palabra francesa aérostation abarca globos, cometas y dirigibles, por eso además de los globos las cometas. Y no hubo dirigibles porque, posiblemente, en ese momento el aviador brasileño Alberto Santos-Dumont podría haber sido la única persona en París que tenía un dirigible completamente funcional.
Los eventos de vuelo en globo que más interés mundial generaron fueron los vuelos de larga distancia. La carrera inicial, en agosto, terminó casi tan rápido como comenzó, ya que el viento obligó a los competidores a descender.
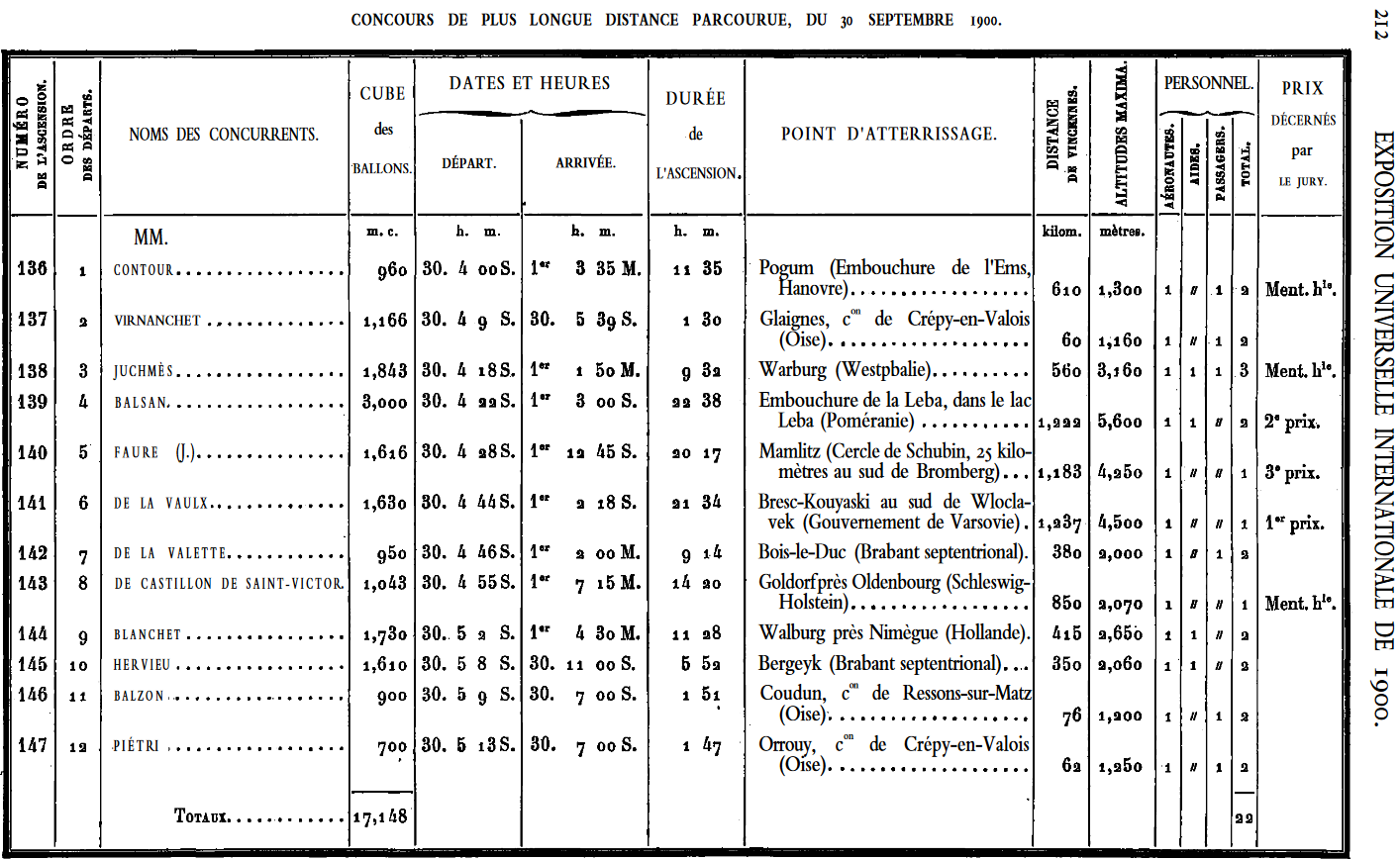
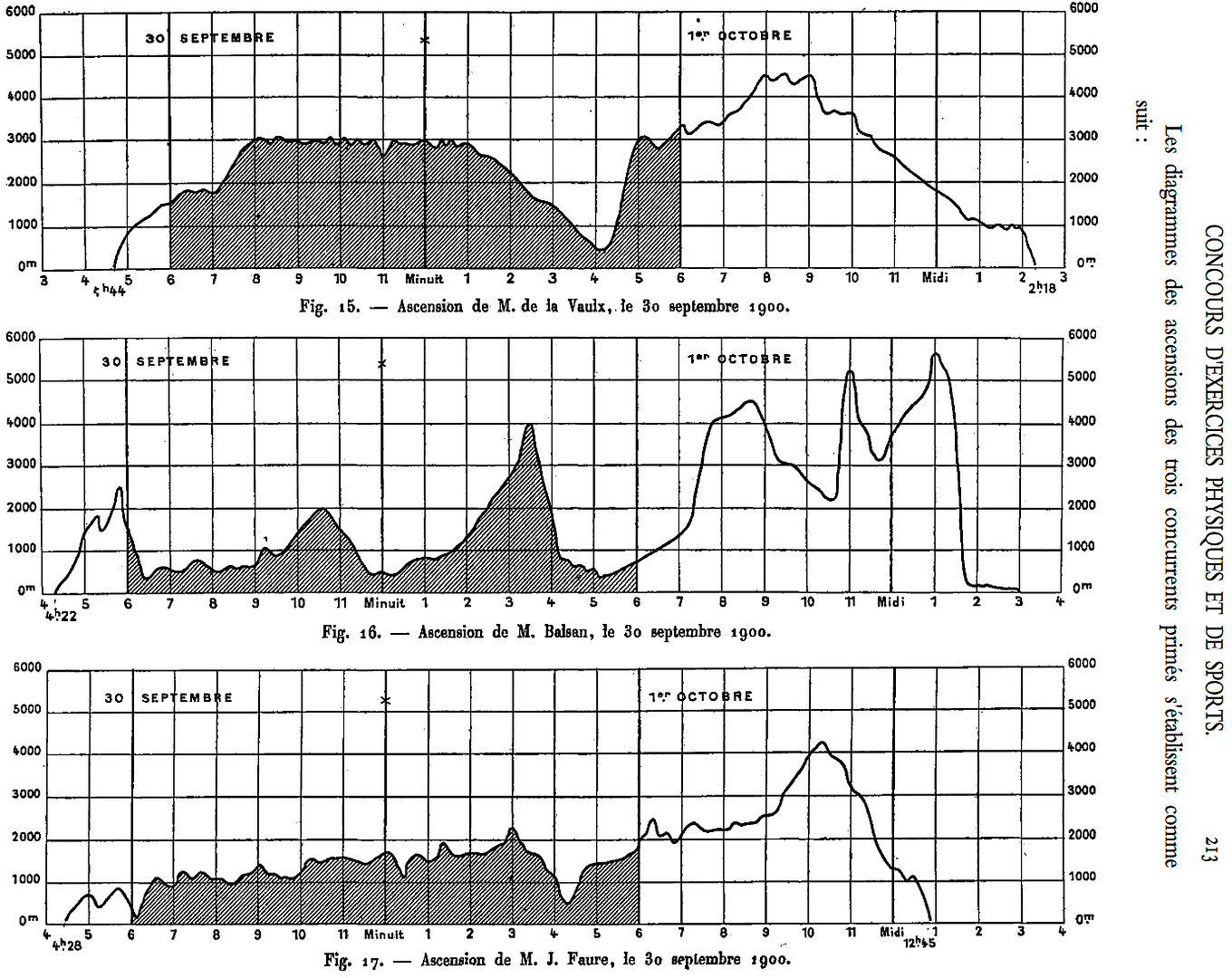
Los vuelos del 30 de septiembre fueron mucho más exitosos. Los competidores podían usar cualquier ventaja que tuvieran, incluyendo determinar su propio lastre y seleccionar el tipo de gas que usaban (se permitía el hidrógeno, que era más caro pero más ligero). También se les permitía llevar bolsas de oxígeno para mitigar los efectos de la altitud.
Jacques Faure, conocido más tarde por su vuelo en globo de 1905 a través del Canal de la Mancha, aterrizó su globo Aero Club a 1183km de Vincennes en Mamlicz, Polonia actualmente (Militsch, Prusia entonces).
Jacques Balsan, quien más tarde sería uno de los fundadores de la Escuadrilla Lafayette en la Primera Guerra Mundial, mostró tanta confianza en su globo, Saint Louis, que llevó a dos pasajeros 1222km hasta Danzig, Prusia (ahora Gdansk, Polonia).

Pero el ganador de esta ronda fue el Conde Henri de la Vaulx, quien ya tenía el récord de larga distancia de 1326km de París a Suecia. Aunque el vuelo de 1237km con su Centaure a Włocławek (justo al oeste de Varsovia, Polonia hoy, Rusia entonces) no rompió ningún récord, aunque se convirtió en el primero en volar de Francia a Rusia.
Inmediatamente después de aterrizar su globo, el Conde de la Vaulx fue detenido por la policía: ¡no había presentado una solicitud de pasaporte en San Petersburgo! Fue retenido durante un día, donde afirmó: «Los oficiales rusos me persiguieron abriendo tantas botellas de champán francés que estaba en gran angustia».
El Conde de la Vaulx (con su compañero, el Conde de Castillon de Saint-Victor, quien había aceptado viajar después de perder la primera carrera) y su competidor Balsan viajaron por un camino similar durante un tiempo, cada uno manteniendo una visual del otro hasta cerca de Breslau, luego los dos globos tomaron caminos separados.
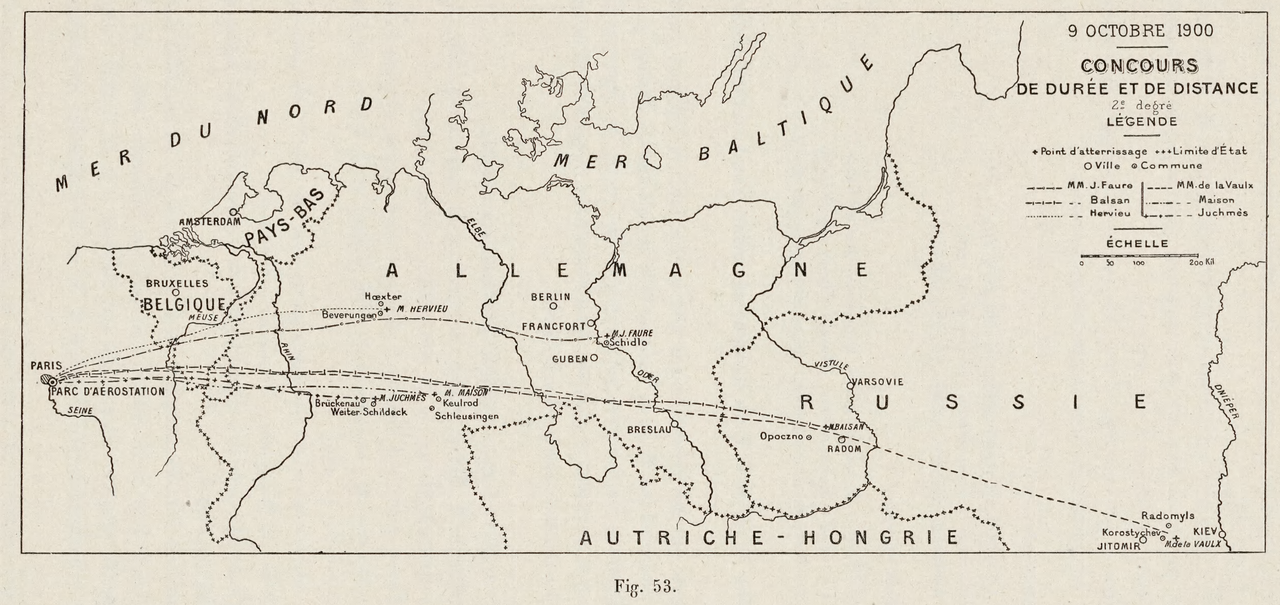
Solo seis globos comenzaron la última carrera de distancia el 9 de octubre. Cuando los aeronautas partieron de Vincennes, la multitud gritó: «¡Viva Rusia!».
Aunque Balsan superó su vuelo anterior, aterrizando a 1360 km en Opochka, Rusia (cerca de la frontera actual con Letonia), de la Vaulx voló a Korostychel, Pequeña Rusia (justo al oeste de Kiev, Ucrania), una distancia de 1922 km. Según las historias de de la Vaulx, aparentemente hubo problemas de pasaporte nuevamente, pero finalmente llegó a Kiev con gran fanfarria y luego regresó a París con éxito.
Después de la carrera, Balsan señaló que de la Vaulx era el único competidor que usaba el ventajoso gas hidrógeno, pero de la Vaulx declaró que no podía llenar completamente el Centaure con hidrógeno, lo que lo obligó a usar otro gas y a aligerar su lastre.
Sus éxitos en los vuelos de larga distancia proporcionaron a de la Vaulx 5080 puntos sobre los 4360 de Balsan, ganando la placa de oro y un bono de 1000 francos (aproximadamente 10000€ en moneda moderna).
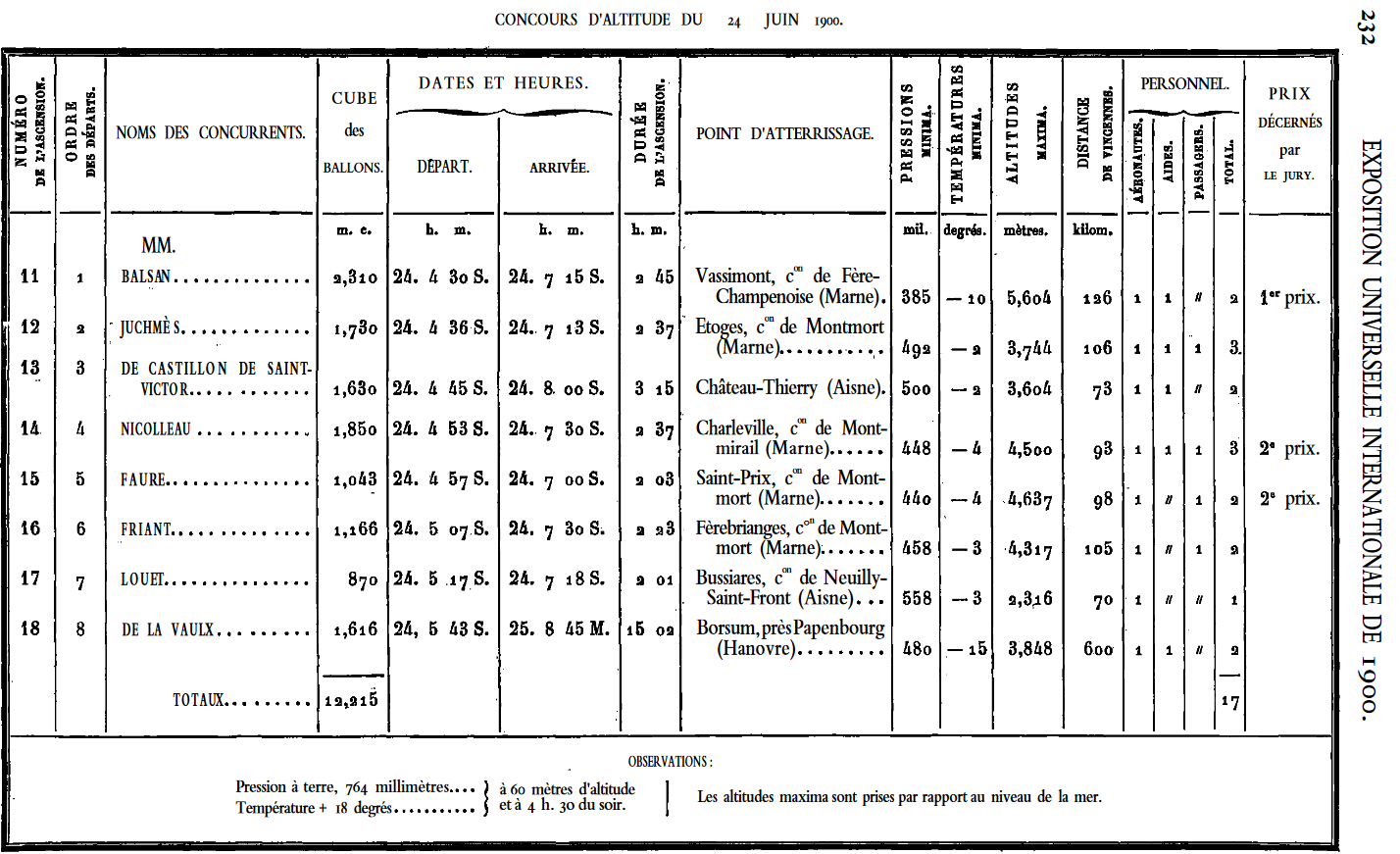
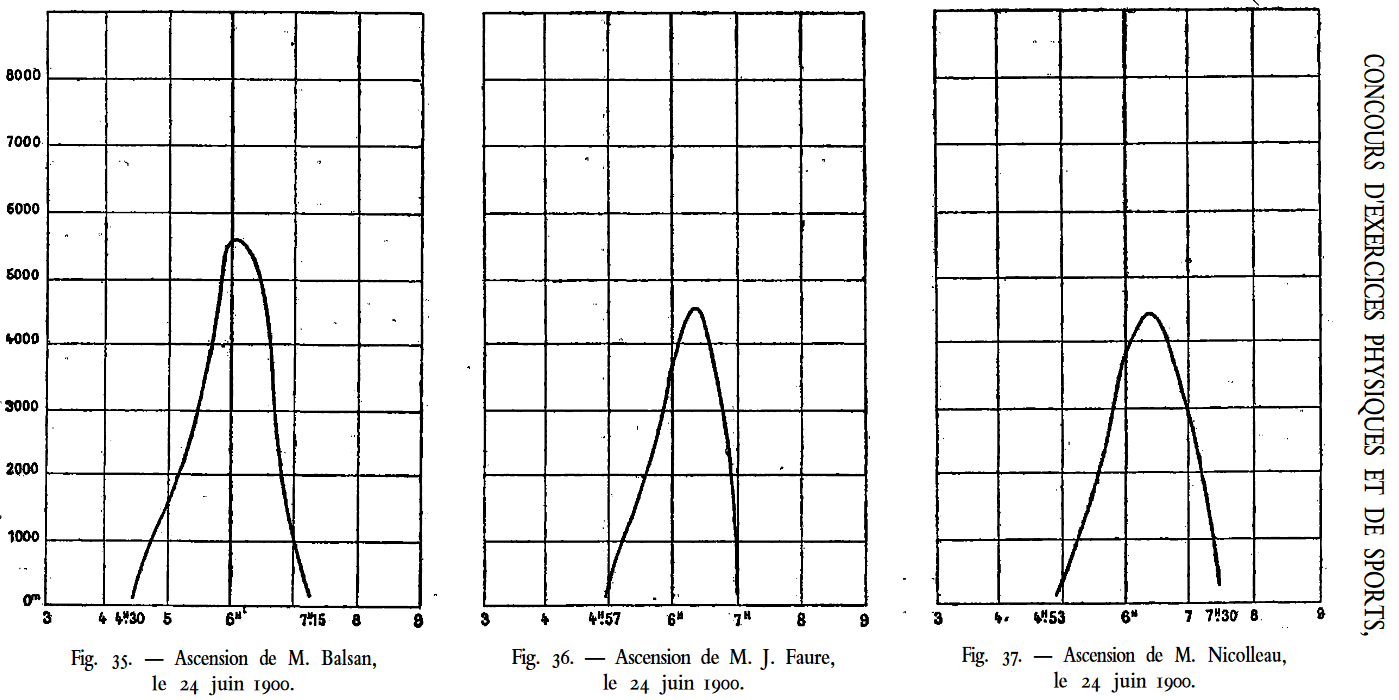
No tanta expectación generaron los concursos de altitud.
¿Y no ha habido más aeronáutica en los juegos olímpicos?
La aeronáutica no volvería a ser un evento olímpico hasta 1936. Aunque tal vez no exactamente: el suizo Hermann Schreiber fue galardonado con una medalla de oro olímpica por mérito en Aeronáutica por un vuelo en planeador de 1935 sobre los Alpes.
Pero desde aquí animamos al COI a recuperar la aviación para los juegos, con deportes como el vuelo a vela, las carreras de navegación aérea (ANR) o la acrobacia.
Lectura recomendada
Si queréis ampliar (mucho) la información sobre los juegos olímpicos de 1900, os recomiendo este informe original de la época, publicado en francés: Exposition Universelle Internationale de 1900 à Paris. Concours Internationaux d’exercices physiques et de sports. Rapports publiés sous la direction de M.D. Mérillon.
- Parte 1
- Atletismo
- Gimnasia
- Esgrima
- Tiro (incluido con cañón de 90mm a 60m)
- Parte 2
- Hípica
- Ciclismo
- Automobilismo
- Náutica
- Salvamento (marítimo, terrestre y en incendios)
- Parte 3
- Aerostación (incluidas las cometas y la colombofilia)
- Ejercicios militares preparatorios
- Concursos escolares
- Higiene y psicología
Nota al pie que encontramos en la fuente del Smithsonian: Aunque parecería extraño que el Conde de la Vaulx fuera retenido dos veces por problemas de pasaporte ruso, es posible que eligiera dos veces no pasar por los trámites burocráticos. O sucedió solo una vez y la historia era demasiado buena para no contarla de nuevo. La historia de los problemas de pasaporte y las celebraciones con champán en Włocławek fue contada por Jacques Boyer en un artículo de febrero de 1901 en la revista The Strand. Alder Anderson contó la historia de Korostychel en un artículo de abril de 1901 en la revista Pearson’s Magazine. Un artículo en francés del propio Conde de la Vaulx cuenta la historia de llegar a las afueras de Kiev, donde el Jefe de Policía los trató con té, mientras su esposa les hacía cigarrillos para pasar el tiempo en «cautiverio». Todos los documentos se pueden encontrar en el archivo «Events, 1900, Exposition Universelle, Paris» en la Colección de Archivos de Referencia Técnica del Museo Nacional del Aire y el Espacio.














_(34081142555).jpg)