Ministerio de Defensa del Reino Unido y los líderes de la industria BAE Systems, Rolls-Royce y MBDA UK han revelado el diseño del demostrador de vuelo del GCAP que, con dos tercios de su peso estructural ya en producción según dice BAE, el proyecto ha alcanzado un importante hito en su desarrollo.
De hecho, no hace mucho que los tres países involucrados en el desarrollo del GCAP anunciaban que establecían la empresa conjunta Edgewing para su producción y establecían Organización Internacional del Gobierno GCAP (GIGO).
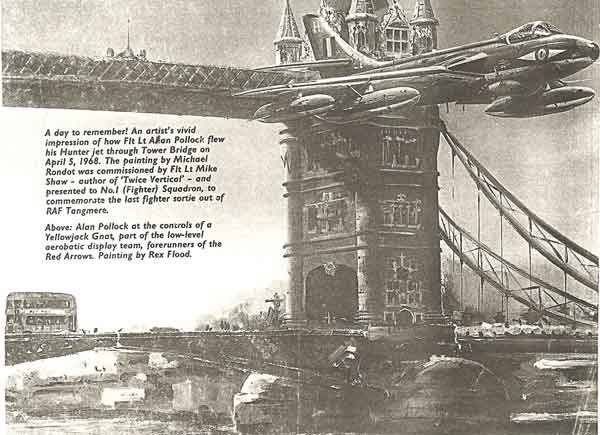
Alan Pollock, quien ganó fama instantánea en abril de 1968 cuando voló su caza Hawker Hunter sobre el Parlamento y bajo el puente más famoso de Londres, ha fallecido a la edad de 89 años.
Como en el caso del vuelo atravesando el arco del trinfo de París para protestar por no poder participar en el desfile tras el final de la Primera Guerra Mundial, Pollock hacía el vuelo para protestar por la falta de reconocimiento del gobierno al 50 aniversario de la fundación de la RAF en 1918.
Hablando con BBC News NI en 2023, el capitán de grupo Hemingway dijo que nunca buscó la fama por ser parte de The Few. Como hemos visto con otros veteranos, nunca estuvo orgulloso de combatir, nunca vio su papel en la Batalla de Inglaterra como algo más que hacer el trabajo para el que fue entrenado, ni tampoco consideró la batalla un momento trascendental en la historia de la RAF o del Reino Unido. Simplemente echaba de menos a sus camaradas, para los cuáles siempre tuvo un brillo especial en los ojos al recordar los momentos divertidos con sus compañeros en Francia y Londres.
En 2013 contábamos que se iba a rescatar un Do-17, sumergido, de un banco de arena. Los planes eran exponerlo en 2018, pero finalmente el proceso de recuperación y restauración ha sido más largo de lo esperado, y el bombardero no estará en exposición hasta comienzos del año que viene, según la BBC.
El icónico Dornier Do 17 será exhibido al público en el Museo RAF Midlands, en Shropshire, a principios de 2025. O al menos, partes de él lo serán: la sección de las alas, junto con los motores y las hélices. No se exhibirá completo por falta de espacio en el hangar de exposición.
El avión completo fue recuperado en las aguas frente a Kent. Es el único ejemplar de Flying Pencil completo que queda en el mundo. Sin embargo, el avión sigue estando en piezas y están siendo sometidas a un meticuloso trabajo para revertir los efectos corrosivos del agua salada.
Después de más de diez años de intensa conservación, tratamiento y estabilización la exhibición representará no solo la culminación de una operación de salvamento extraordinaria, sino también una manera única de entender la Batalla de Inglaterra. Este es un momento notable para la historia de la aviación en Gran Bretaña. Dr. Harry Raffal, jefe de colecciones e investigación del RAF Museum en Cosford.
Este avión en particular fue derribado en agosto de 1940 por un Boulton Paul Defiant de la RAF.
Los restos del Do 17 pasaron más de 70 años en el lecho marino bajo las aguas de Goodwin Sands, en Kent.
Fue recuperado en una operación dirigida por el museo en junio de 2013.
Tras la recuperación, el fuselaje, la sección de alas, las hélices y los motores del avión fueron colocados en túneles de hidratación.
Se rociaron con una solución de ácido cítrico de baja concentración para eliminar los sedimentos marinos y neutralizar las impurezas corrosivas.
Una vez hecho esto, el fuselaje fue retirado de los túneles en septiembre de 2014, seguido de las alas y los motores en enero de 2015.
Desde entonces, el Do 17 ha permanecido en el centro de conservación del museo, donde sigue hoy en día.
El museo anunció que la sección de las alas será exhibida al público a partir de principios de 2025, dependiendo de las condiciones meteorológicas adecuadas para el traslado.
Mientras tanto, el fuselaje permanecerá almacenado debido a limitaciones de espacio en los hangares de exhibición. Sin embargo, el nuevo año también verá la presentación de las hélices y los motores.
El avión será expuesto junto con un Boulton Paul Defiant como el que lo derribó.
Identificación del Do-17
Una investigación realizada por la Air Historical Branch y el RAF Museum lo identificó como un Dornier 17 Z-2, con el número de serie 1160, de la 7ª Staffel, III Gruppe/KG3 (7º Escuadrón del 3er Grupo de la Ala de Bombarderos 3).
Su registro era 5K + AR. El lunes 26 de agosto de 1940 despegó de su aeródromo, St. Trond, en Bélgica. Era uno de los 7 aviones armados 16 bombas de 50 kg con la misión de bombardear los aeródromos del Fighter Command en la zona de Medway. Antes de llegar al objetivo, mientras volaba por encima de las nubes, el avión se separó del resto de la formación y perdió el rumbo. Fue entonces atacado por cazas Boulton Paul Defiants, del 264º Escuadrón, con base en Hornchurch, Essex. Ambos motores fueron alcanzados, así como la cabina de vuelo. Con al menos uno de los motores parado, el avión aterrizó en los Goodwin Sands en marea baja (a las 13:40).
No se ha confirmado la identidad del caza responsable del derribo, ya que podría haber sido a su vez derribado por la escolta alemana, de la Jagdgeschwader 3 (Ala de Cazas 3).
De los cuatro miembros de la tripulación, dos (el piloto herido Feldwebel Willi Effmert y el bombardero Uffz Hermann Ritzel) se convirtieron en prisioneros de guerra en Canadá, y dos (el operador de radio de 27 años Unteroffizier Helmut Reinhardt y el artillero de 21 años Gefreiter Heinz Huhn) murieron, cuyos cuerpos fueron recuperados más tarde y enterrados en los Países Bajos y el Reino Unido (en el cementerio alemán de Cannock Chase).
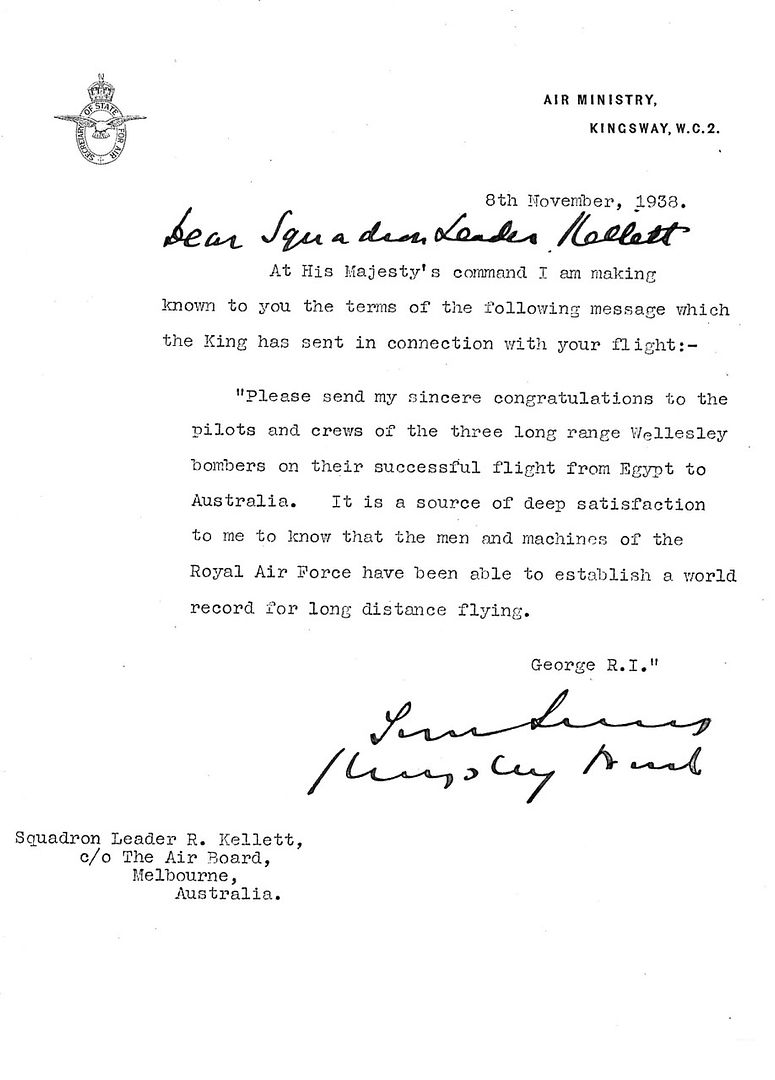
5-7 de noviembre de 1938 — Se establece un nuevo récord mundial de distancia cuando dos Vickers Wellesleys vuelan sin escalas desde Egipto hasta Darwin, Australia.
Dos de tres bombarderos Vickers Wellesley de la Royal Air Force (RAF), estacionados en el aeropuerto de Darwin después de completar un vuelo sin escalas y de larga distancia desde Ismailia, Egipto, hasta Darwin, Australia. Y aún no se estilaba el respostaje en vuelo, así que ese sin escalas implica, a su vez, ¡sólo con el combustible que llevaban a bordo!
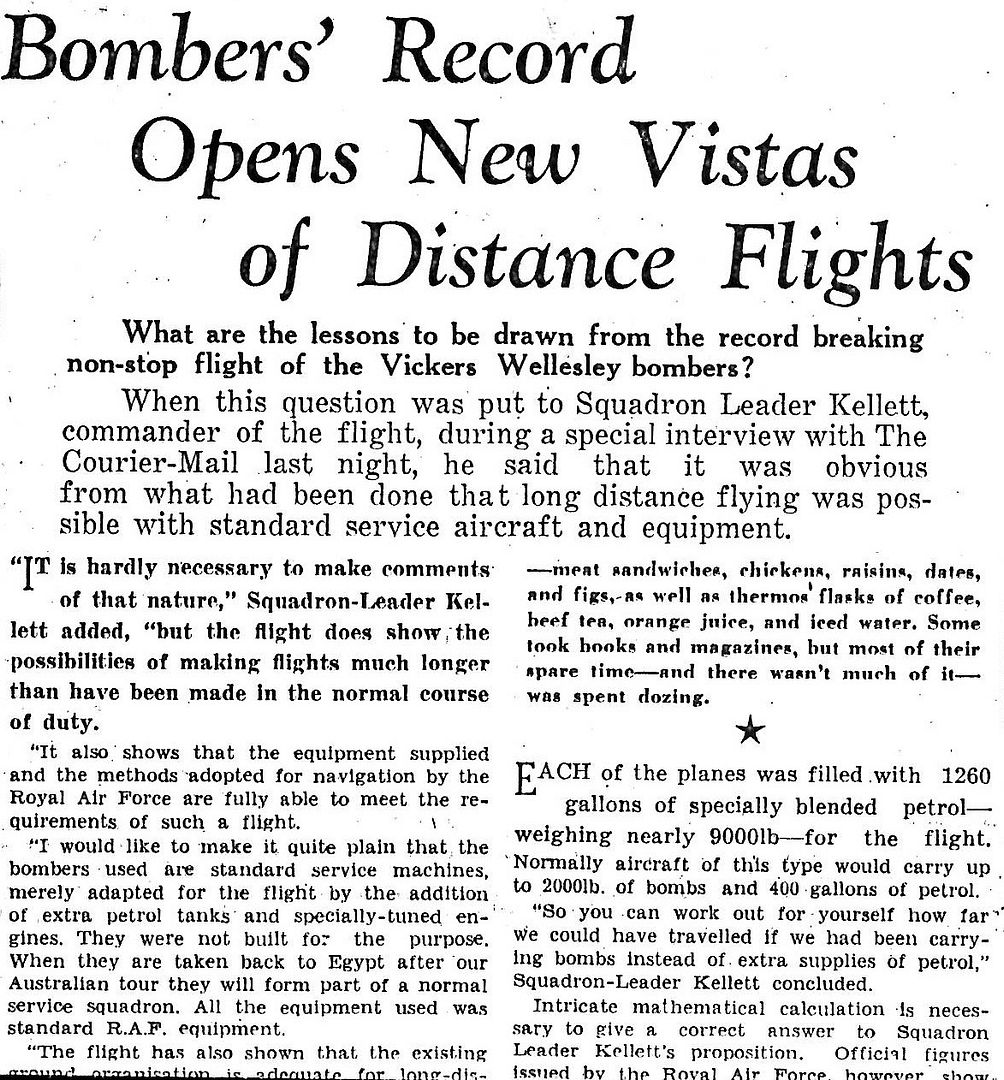
El vuelo cubrió una distancia de 11256 kilómetros y se completó en poco más de 48 horas, arrebatando el anterior récord de vuelo a Rusia de 10000km, y estableciendo un nuevo récord mundial que no fue superado hasta 1945. Estas aeronaves fueron pilotadas por el comandante de escuadrón Kellett y el Flt Lt Combe.
La tercera aeronave, pilotada por el Flt Lt Hogan, se desvió a Koepang en Timor para repostar combustible, y llegó a Darwin más tarde ese mismo día.
El Vickers Wellesley fue un bombardero medio diseñado y producido por el fabricante británico de aeronaves Vickers-Armstrongs en Brooklands, cerca de Weybridge, Surrey. Fue una de las dos aeronaves bautizadas en honor a Arthur Wellesley, 1er Duque de Wellington, siendo la otra el Vickers Wellington.
El Wellesley fue desarrollado a principios de la década de 1930 en respuesta a la Especificación G.4/31, como el Parnall G.4/31.