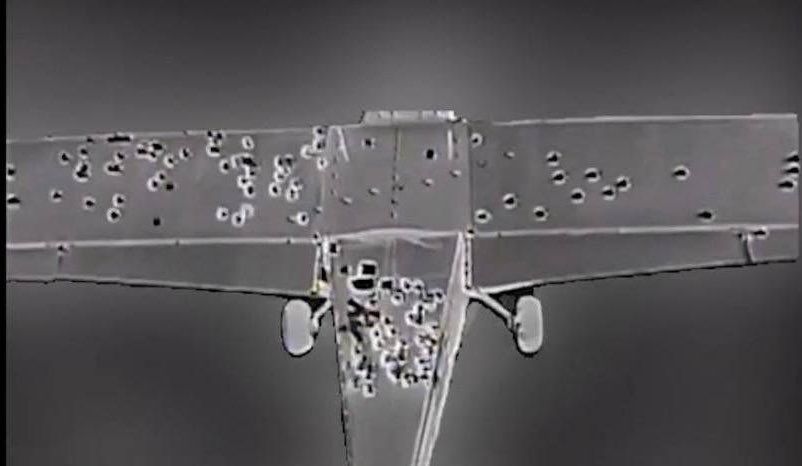
El ultraligero SkyRanger dronizado por los ucranianos ha vuelto a causar revuelo en las redes sociales. En esta ocasión porque se ha publicado un vídeo de un drone interceptor ruso estrellándose contra él, en el que se puede ver cómo la aeronave sigue volando a pesar de los daños.
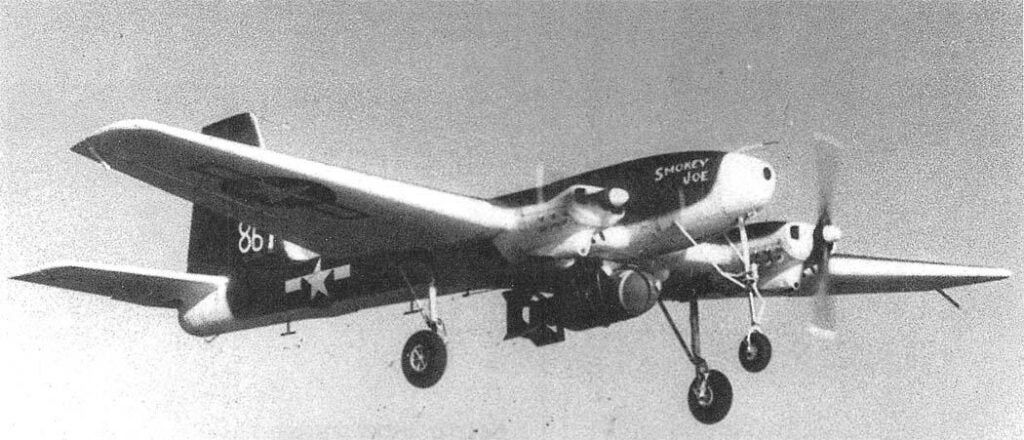
Aunque la imagen es muy impresionante, no es tan extraña. El avión es una aeronave de estructura tubular y revestimiento de tela, no trabajante, bastante tolerante al daño. Y los impactos son de pequeño calibre y han impactado en la tela, pero no han causado daños en la estructura primaria ni en elementos de control, así pues el SkyRanger sigue en vuelo, siempre y cuando no se alcance una zona vital del mismo.
De aquí hay gente que ha sacado la lectura de que las viejas estructuras reticulares revestidas de tela son muy tolerantes al daño.
Personalmente, y después de hablar tanto de interceptación de drones de gran tamaño, yo sacaría otra lectura: se necesita munición de mayor tamaño o explosiva para tirar drones como éste, las escopetas con postas y la munición similar se queda corta. ¿Veremos la introducción en Ucrania de calibres mayores, como el 30mm del apache, con espoletas de proximidad?