
Hoy tenemos un drone que puede despegar en vertical, mantenerse en vuelo estacionario y volar rápido en horizontal. Pero no es un helicóptero, ni un convertiplano, ni un tri-cóptero. Es… todo a la vez.
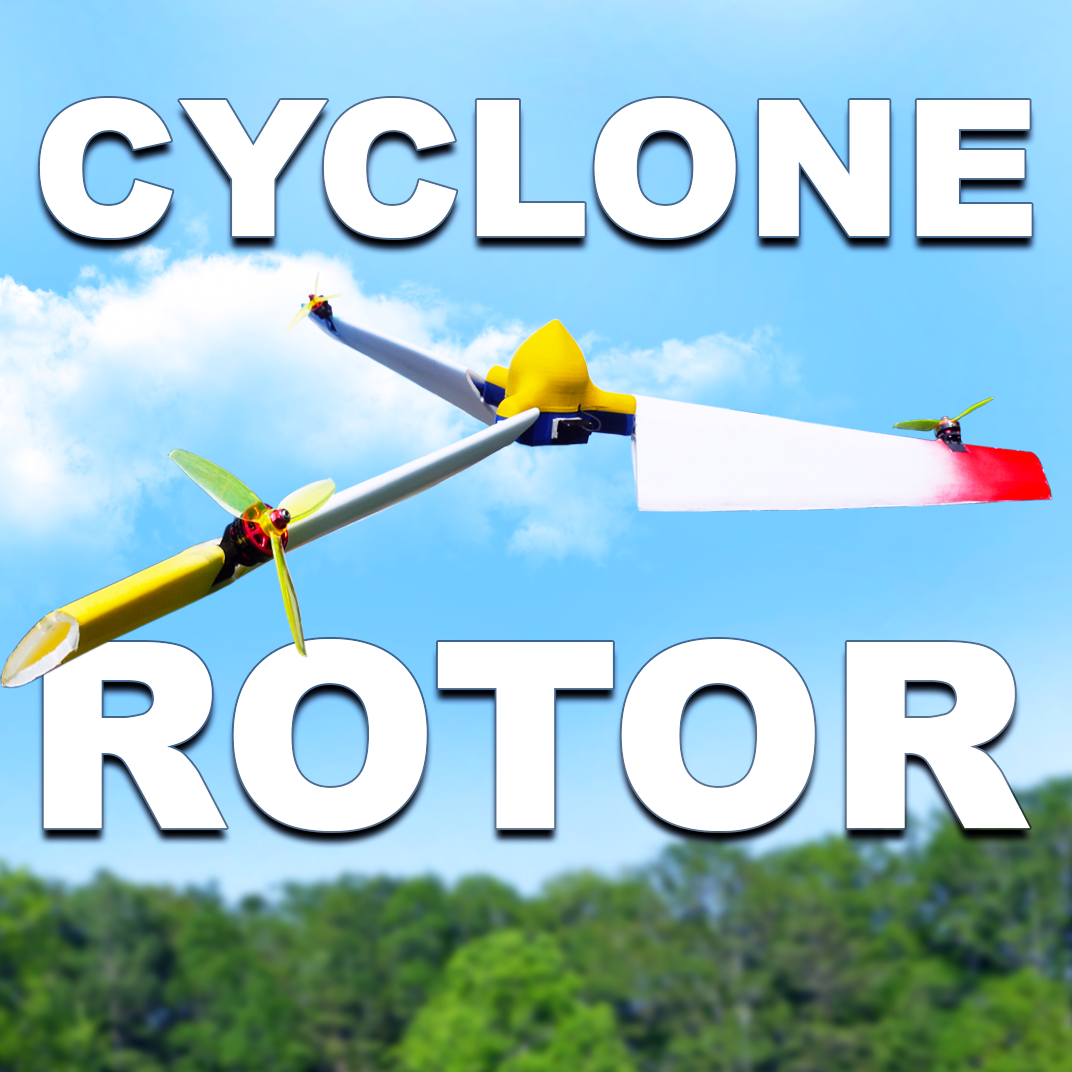
Imaginad un pequeño fuselaje entorno al cual se sitúan tres grandes palas. Y cada pala tiene un pequeño motor de multicóptero. Cuando está en tierra despega en vertical como si se tratara de un multicóptero. Pero tan pronto está en el aire los rotores se inclinan, haciendo que las tres palas giren sobre el fuselaje central, convirtiéndose en un ala rotatoria enorme. Y para volar en horizontal como un avión, dos de estas palas actúan como alas mientras que la tercera se mantiene en vertical, como un gran estabilizador, recordando a cierta nave de ficción al ser vista de frente.
De este modo el inventor nos promete la posibilidad de despegue en espacios confinados, el vuelo a punto fijo con la economía de un ala rotatoria, en lugar de con el alto consumo de un multicóptero habitual, y el eficiente vuelo de un avión de ala fija cuando se vuela en crucero.
La eficiencia de un rotor depende de su área. Por eso los pequeños multirrotores consumen tanta energía. En este artilugio se incrementa el área del disco rotor y se utilizan rotores de punta de pala lo que hace, como en el caso de los helicópteros con motores a reacción en punta de pala, que no necesite un sistema anti-par.
Aprovechando las leyes de la naturaleza para un vuelo multi-rotor más eficiente. 300% más eficiente, para ser exactos. Este es un VTOL que tiene tres modos de vuelo: vuelo estacionario convencional, vuelo estacionario como ala rotatoria, más eficiente, y vuelo en avance, rápido.
Aumentar el área del disco del rotor agregando palas a los brazos y haciéndolo girar usando las hélices más pequeñas del dron reduce la pérdida de energía al arrastrar mientras se mantiene suficiente sustentación para el vuelo estacionario. Gracias, teoría del impulso.
Siempre quise construir un VTOL giratorio similar a otros inspirados en la hoja de arce. Esta plataforma me permitirá probar algunas estrategias de control nuevas y únicas para mantener el control desde un marco de referencia inercial fijo. También es único porque está diseñado específicamente para poder operar en cualquiera de los tres modos de vuelo. Vuelo hacia adelante para un crucero eficiente, giro para un vuelo estacionario y un ascenso eficientes, y vuelo estacionario regular para despegues y aterrizajes. Por lo tanto, no solo puede planear como un avión si hay un fallo en el motor, sino que también puede autorrotar si el fallo ocurre mientras está en vuelo estacionario.
Nicholas Rhem, el inventor
El inventor ha dejado los ficheros y otros detalles para que os lo podáis fabricar en HackAday.
Fuentes: publicación en LinkedIn del inventor.
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.