La USAF quiere enviar una nueva versión de su ULTRA, un uav basado en un motovelero Stemme, parece el S-10 o el S-12, y que os presentamos en mayo de 2024. El ULTRA Turbo puede volar más rápido y más alto que el diseño original, pues ha cambiado su motor Rotax original por el más potenteRotax 916. Y se dirige a Irán para realizar ensayos operativos, cuyo resultado sería su potencial adopción como aeronave equivalente al Reaper, pero de mucho menor coste.
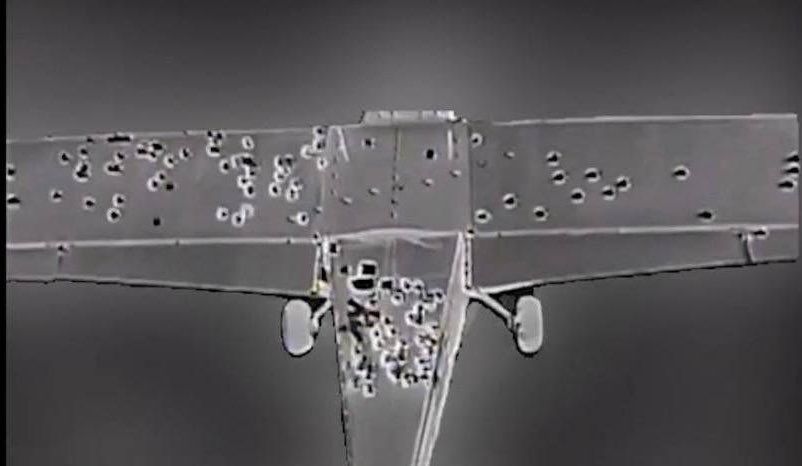
El ultraligero SkyRanger dronizado por los ucranianos ha vuelto a causar revuelo en las redes sociales. En esta ocasión porque se ha publicado un vídeo de un drone interceptor ruso estrellándose contra él, en el que se puede ver cómo la aeronave sigue volando a pesar de los daños.
Aunque la imagen es muy impresionante, no es tan extraña. El avión es una aeronave de estructura tubular y revestimiento de tela, no trabajante, bastante tolerante al daño. Y los impactos son de pequeño calibre y han impactado en la tela, pero no han causado daños en la estructura primaria ni en elementos de control, así pues el SkyRanger sigue en vuelo, siempre y cuando no se alcance una zona vital del mismo.
De aquí hay gente que ha sacado la lectura de que las viejas estructuras reticulares revestidas de tela son muy tolerantes al daño.
Personalmente, y después de hablar tanto de interceptación de drones de gran tamaño, yo sacaría otra lectura: se necesita munición de mayor tamaño o explosiva para tirar drones como éste, las escopetas con postas y la munición similar se queda corta. ¿Veremos la introducción en Ucrania de calibres mayores, como el 30mm del apache, con espoletas de proximidad?
Los drones interceptores P1-Sun ucranianos desarrollados por SkyFall se están lanzando desde aviones para destruir UAVs de ataque tipo Shahed rusos.
En la lucha por abaratar los costes de interceptación aire-aire de drones estilo Sahed hemos visto la introducción de avionetas armadas, el uso de aviones agrícolas y de transporte armados, y el nacimiento de pequeños drones kamikaze diseñados específicamente para derribar otros drones. Y, ahora, hemos llegado a la unión de los dos últimos: un An-28, que ya llevaba una minigun, como avión nodriza de drones interceptores usados para cazar Saheds al vuelo, lo que recuerda bastante (por cierto) al nacimiento de los misiles antiaéreos teledirigidos, aunque en un comienzo fueron filoguiados, como el Ruhrstahl X-4.
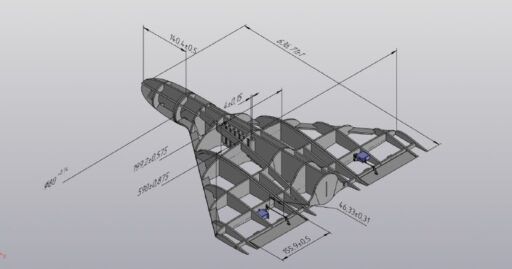
Se trata de un UAV kamikaze (llamados también munición merodeadora, drones de sólo ida…) de bajo costo y largo alcance, desarrollado originalmente por Irán con la intención primigenia de tener efectores validos para realizar ataques de negación plausible en toda la region de Oriente Proximo. Con una longitud de 3.5 metros y una envergadura de 2.5 metros, está diseñado para llevar una carga explosiva de 40 a 50kg (con diversidad de tipos de ojiva, desde las cargadas con metralla a las de carga hueca, pasando por —según algunos medios— cargas termobñaricas) hasta su objetivo, siguiendo una ruta pre-programada.
Está diseñado para ser lanzado en oleadas (que no en enjambre), en grandes cantidades, para realizar ataques de saturación, obligando a los defensores a consumir grandes recursos económicos en su interceptación
El podcast de hoy bien podría ser un resumen de muchos de los episodios que hemos publicado ya, pero como hemos recibido bastantes consultas por email y otros medios, hemos creído oportuno hacer este especial dedicado a la defensa anti-drones, para intentar definir qué es eso de la defensa por capas, o por qué no hay un sistema definitivo anti-drone y cada cual es más adecuado para un tipo de drone o fase de vuelo del mismo. ¿Nos acompañáis?
P.D.: Si la intro y la despedida os son familiares, que no os sorprenda. En un ejercicio de nostalgia podcasteril he hablado con Javier Lago para pedirle permiso y utilizar la introducción que hizo para el que, si no recuerdo mal, fue el primer podcast español sobre aviación: Remove Before Flight RBF podcast.