Venimos siguiendo este BWB, o avión de ala integrada con el fuselaje, de Bombardier desde que lo anunciaron. Y nos ha alegrado ver en su nota de prensa que continúan los ensayos, esta vez con un modelo de mayor escala.
Bombardier sigue los pasos que dieron en su día Boeing y Airbus con el desarrollo de esta nueva configuración, iniciando la segunda fase de pruebas.
En alguna ocasión hemos debatido que esta configuración no es la mejor para aviones de pasajeros de gran tamaño. Pero podría ser óptima para aviones de negocios, y reducir sus emisiones hasta en un 50%. En otras notas de prensa hablaban de un 20%, y en ese rango debemos considerar los beneficios, si sumamos no sólo la forma, sino también los motores o el tipo de combustible.
El análisis de los datos recopilados del prototipo permitirá al equipo de ingeniería de Bombardier perfeccionar su conocimiento de las nuevas leyes de control que tienen que desarrollar para esta configuración.
Nuestros ingenieros están ansiosos por comenzar a trabajar con los resultados obtenidos en esta segunda fase del programa de pruebas de vuelo. Basándonos en los datos significativos obtenidos en la fase inicial de pruebas de vuelo y aprovechando ahora un modelo dos veces más grande que el primer prototipo, podemos refinar aún más nuestro análisis. Con cada etapa experimental adicional, estamos abriendo el camino para diseños de aeronaves más sostenibles y nuevas tecnologías.
Stephen McCullough, Vicepresidente Senior de Ingeniería y Desarrollo de Productos.
El prototipo de 5.5m de envergadura voló por primera vez en 2022. El equipo de Investigación y Tecnología de Bombardier comenzó a probar la viabilidad en la vida real de su trabajo teórico en 2017 con el primer prototipo, que tenía una envergadura de aproximadamente 2.4m.
El avión
El proyecto comenzó en 2017, y Bombardier trabajó en él en secreto, hasta que lo presentó enEBACE.
No es el primer constructor que se apunta a este concepto, aunque sí es el primero que lo propone como reactor de negocios en lugar de como avión de pasajeros.
Con el EcoJet, Bombardier pretende probar distintas soluciones que reduzcan el consumo, con la participación de las universidades y actores industriales canadienses.
Esta configuración reduce mucho la resistencia, y por tanto el consumo. Y Bombardier pretende ensayar la propulsión híbrida con él. Rechazan la idea de la aviación eléctirca pura por el consabido problema de densidad energética de las baterías.
La posición de los motores, si bien tradicional en los reactores de negocios, tiene varias ventajas, como poder intercambiar con relativa facilidad el tipo de motor sin gran impacto en la estructura, o poder jugar con el concepto de ingestión de la capa límite para reducir más la resistencia.
La transición a unos aviones de bajas emisiones de CO₂ esperan lograrla basándose en cuatro puntos.
Tecnología: nuevas configuraciones de la aeronave, la introducción del hidrógeno y del combustible sostenible para aviación (SAF), la propulsión híbrida o el reciclaje.
Operaciones e infraestructura: no todas las mejoras pueden realizarse en las aeronaves. Se pueden realizar muchas mejoras en la forma de operar las aeronaves así como en las infraestructuras donde operan o con las que se le dan apoyo. Las innovaciones en los aeropuertos, en las rutas, en el mantenimiento y el servicio de las aeronaves se ensayaran en las nuevas instalaciones de Bombardier de Toronto Pearson International Airport, Mississauga.
SAF: Bombardier está trabajando en la implementación de este tipo de combustibles.
Este tipo de diseño han despertado siempre las mismas dudas: su escalabilidad, su presurización, falta de visión del exterior y las aceleraciones sufridas por los pasajeros que viajan cerca de las puntas de las alas.
En los aviones tipo tubo es relativamente sencillo hacer su evacuación rápida, al estar todos a la misma distancia de la pared, y por tanto de la salida.
Al crecer mucho este tipo de aeronave los pasajeros situados más al centro quedan lejos de cualquier puerta, lo que dificulta su evacuación en caso de emergencia. Eso mismo hace que los que están más al centro queden lejos de cualquier ventana.
El tema de las aceleraciones tiene que ver con los desplazamientos que se producen en el alabeo. En un tubo todos los pasajeros están cerca del eje central del avión, sobre el que rota en el alabeo. En un ala volante o en un BWB los más lejanos a esa línea experimentarían mayores desplazamientos y aceleraciones.
Sin embargo, al ser un avión de negocios su tamaño es relativamente contenido, el número de pasajeros mucho menor, y la disposición del espacio se puede arreglar de tal modo que los pasajeros queden en la zona más cómoda del avión y las zonas «accesorias» (oficina, bar, sala de reuniones) queden en las zonas más incómodas. De este modo se facilita la evacuación, y que los pasajeros vayan confortables durante las fases de más turbulencia.
En cuanto a la presurización, es sabido que es más sencillo presurizar una forma esférica o cilíndrica, apareciendo menos esfuerzos, por eso los tanques a presión tienen estas formas. Pero al ser un avión relativamente pequeño se puede obtener una zona elíptica central fácilmente presurizable.
Por todo esto pensamos que será mucho más fácil ver volar un avión de negocios con esta tipología que un avión de aerolínea.
Recientemente se ha celebrado una competición de sumo en la isla de Amami Ōshima. Debido al tamaño de la pista de su aeropuerto, sólo pueden operar aeronaves relativamente pequeñas, por la carrera de despegue, y las aerolíneas utilizan, como mucho, aviones de pasillo único como el 737. El peso promedio del pasajero masculino se calcula en unos 88kg. En Japón incluso menos, unos 70. Sin embargo la media de peso de los luchadores de sumo era de unos 120kg, y algunos pueden llegar a los 200.
En aviación el peso es importante, tanto por cómo se distribuye dentro de una aeronave (carga y centrado) como por el peso máximo al despegue/aterrizaje que puede tener una aeronave, como por la longitud de pista necesaria para levantar ese peso o el consumo de combustible durante el trayecto. Por eso, el número de luchadores de sumo a transportar generó preocupaciones a Japan Airlines, lo que llevó a la compañía a programar vuelos adicionales para distribuir el peso en varias aeronaves, en lugar de utilizar un avión más grande, que no podía operar con seguridad en el aeropuerto de destino.
Los vuelos tenían que realizarse desde Osaka Itami y Tokio Haneda, hasta Amami Ōshima. Los aviones operados por Japan Airlines en esas rutas son Boeing 737-800. Y la decisión de Japan fue fletar un avión extra. Veintisiete de los atletas finalmente viajaron en este vuelo extra, incluyendo 14 que tuvieron que volar desde Osaka a Tokio para tomar el vuelo especial.
Tras la finalización de la competición, se repitió la operativa con vuelos adicionales.
Japan Airlines no es la única aerolínea que vuela a Amami. También lo hace Peach Aviation, una subsidiaria de bajo coste de ANA. Sin embargo, no hay información de si esta aerolínea también tuvo que hacer arreglos especiales para el evento.
Editamos: unas fotos de hace 9 años, para ilustrar la noticia
Los cohetes son a los años 30 lo que la energía nuclear en los 50 y las baterías de litio hoy en día: llevaban unos años funcionando, aún no se conocían todas las ventajas y limitaciones y por tanto eran el futuro para todo, y se intentaban montar en todo.
Las asociaciones de coheteros hacían sus experimentos en Estados Unidos, Alemania y Rusia, especialmente. Iban ensayando distintas configuraciones combustibles… y aplicaciones.
Una de ellas fue entregar correo.
En 1936 hubo varios intentos, como el primer vuelo en Estados Unidos de un avión-cohete para entregar correo. También ese mismo año se producía la primera entrega ¡internacional! de correo aéreo propulsado por cohete.
Aunque cubrió solo unos pocos cientos de pies, el reciente vuelo del «Gloria», el primer cohete de correo aéreo de Estados Unidos, en el lago Greenwood en Nueva Jersey, puede considerarse con el tiempo tan significativo como el primer vuelo histórico de los hermanos Wright en Kitty Hawk. , que cubría una distancia aún más corta.
Alrededor de 1000 personas reunieron 6000 cartas que se colocaron en sacos de asbesto y se cargaron en la punta de dos aviones-cohete que estaban destinados a volar a Nueva Jersey. En cambio, se estrellaron contra el lago congelado.
Los coheteros y los periódicos lo declararon un éxito, pero el US Postal Service dijo que no estaba interesado en las posibilidades basadas en los resultados de este vuelo de prueba.
Las coberturas están disponibles para ese vuelo, pero están, como era de esperar, en el rango “bastante caro”.
Así contaron la historia en Popular Mechanix:
El primer correo aéreo propulsado por cohete (Popular Mechanix, Mayo de 1936)
A pesar de la corta distancia recorrida, el vuelo del cohete correo ha sido considerado un éxito porque demostró ciertos principios básicos importantes para el programa de investigación mundial. Demostró que un motor de cohete puede levantar y propulsar un avión cargado cincuenta veces más pesado que el propio motor. También demostró que un avión cohete puede mantener una estabilidad segura mientras está en el aire. Desde el primer vuelo, parece que el principio del motor de reacción es básicamente sólido, aunque puede mejorar.
El “Gloria” fue un emprendimiento de la Rocket Airplane Corporation of America, mientras que el diseño aerodinámico de las alas y el fuselaje fue aporte de la Escuela Guggenheim de Aeronáutica. Cargado con sobres de correo aéreo dirigidos a coleccionistas de sellos, el “Gloria” patinó hasta detenerse en el hielo a unos 2000 pies del punto de despegue. El motor de dos libras del “Gloria” en realidad desarrolla 300 caballos de fuerza por minuto. En el bloque de prueba registró casi cincuenta libras de empuje en un dispositivo de medición. Propulsando un avión de 100 libras a una velocidad de aproximadamente 4000 pies por segundo, el motor del cohete desarrollaría un equivalente de 160000 libras-pie por segundo.
Si bien el motor es simplemente un tubo hueco sin partes móviles, su construcción implicó muchas dificultades. En la actualidad, la principal dificultad para construir un motor de cohete está en encontrar un metal u otra sustancia que resista el intenso calor generado, de unos 2.000 grados centígrados. Todos los metales comunes y muchos raros se derriten a temperaturas más bajas. El motor del “Gloria” estaba hecho de aleación monel. Cuando se desarrolle una sustancia mejor resistente al calor, habrá una gran mejora en los registros de rendimiento de los cohetes.
Otra consideración importante en la actualidad es el combustible. Después de muchas decepciones, los coheteros han abandonado el combustible en polvo y lo han sustituido por combustibles líquidos. Los cohetes de pólvora crean ondas de detonación que provocan peligrosas explosiones. El combustible líquido se presta a una manipulación y un control más sencillos, y es más seguro de manejar. El motor del “Gloria” quemaba una mezcla de poderosos combustibles mezclados en una cámara de combustión. El tanque de combustible No. 1 contenía oxígeno líquido, temperatura de unos -200 grados centígrados; el tanque No. 2 contenía una mezcla de alcohol, gasolina, metano y otros líquidos; el tanque No. 3 contenía gas nitrógeno comprimido. El nitrógeno dio la presión necesaria a los otros tanques.
A medida que los líquidos de los tanques uno y dos se mezclan en la cámara de combustión, explotan con un tremendo impacto. La combustión repentina genera un gas caliente que tiene un volumen de miles de veces el volumen original de los combustibles. La presión del gas que escapa eleva el cohete contra la gravedad. Teóricamente, se suponía que el “Gloria” aumentaría su velocidad hasta alcanzar un máximo de 500 millas por hora. Esto está muy lejos de la velocidad requerida para escapar de la gravitación terrestre: 25,200 millas por hora.
Los experimentadores de cohetes espaciales no están especialmente interesados ahora en explorar el espacio exterior. Quieren, primero, construir un cohete que sea útil para comunicaciones de alta velocidad en altitudes comparativamente bajas. Dichos cohetes serían útiles para enviar correo a lugares remotos e inaccesibles. Los tácticos militares ven aún otras posibilidades. Un cohete podría convertirse en un proyectil volador con su propia planta generadora de energía. Volaría más rápido que los aviones más rápidos y escaparía de los ataques antiaéreos. Por razones obvias, tanto el avión como el globo son ineficaces por encima de los 40000 pies, pero el motor del cohete funciona mejor en el vacío que a bajas altitudes.
Con el motor cohete, no hay desperdicio de energía en la transmisión de potencia a través de ejes, engranajes o transmisiones. Por primera vez, el hombre ha encontrado un medio de obtener energía directamente del calor de la combustión. Ese es el principio del motor de reacción, y es probable que encuentre muchas aplicaciones útiles en el futuro. Teóricamente, al menos, los coheteros han llegado lejos. Ya se ha diseñado un avión cohete con hélice. Las cámaras de combustión están contenidas dentro de las palas de la hélice. También han estudiado las posibilidades de los aviones cohete transportadores de personas. Un hombre de 150 libras en un barco de 250 libras necesitaría cincuenta libras de combustible para cohetes para un vuelo de ocho millas.
La patente del Prof. Robert H. Goddard, científico de la Universidad de Clark, que ha estado experimentando durante años en Roswell, N. M., con fondos proporcionados conjuntamente por Carnegie Institución de Washington y la Fundación Daniel y Florencia Guggenheim.
El avión Jekyll-Hyde [pdf], como se describe en la patente, cambiaría su forma de un avión convencional, mientras está en altitudes más bajas, a un cohete aerodinámico cuando se alcanza la estratosfera enrarecida. En la troposfera, la capa de aire que rodea inmediatamente a la tierra, el avión cohete tiene alas, hélices, un patín de cola, ruedas de aterrizaje, timón y otras partes convencionales. Arriba, en la estratosfera, todas las partes sobresalientes desaparecen en el cuerpo y solo quedan alas cortas.
En lugar de ser impulsado por hélices a estas altitudes elevadas, el avión es impulsado por chorros de gases que fluyen a gran velocidad desde las toberas del cohete en la cola. Los pasajeros estarían protegidos de los cambios de temperatura y presión por la peculiar construcción hermética y aislada del cuerpo de la nave. La nave llevaría un suministro de oxígeno para los pasajeros.
Al volar como un avión, las hélices no serían impulsadas por motores de gasolina sobrealimentados, sino por gases calientes resultantes de la combustión de hidrógeno y oxígeno. Disparados contra las palas de las turbinas a las que están conectadas las hélices, estos gases las harían girar a velocidades tremendas, de la misma manera que el vapor disparado contra las miríadas de palas de los generadores turboeléctricos hace girar los generadores para producir electricidad.
Del avión del Dr. Goddard puede surgir el avión de línea propulsado por cohetes que resolverá los problemas de transporte del mañana. La versatilidad de la nave del Dr. Goddard puede resolver varias dificultades que ahora rodean el vuelo de cohetes. A bajas velocidades, un cohete es ineficiente. Mientras vuela a varios miles de millas por hora, no requiere alas, pero al despegar y aterrizar ocurre lo contrario. El avión cohete del Dr. Goddard tiene en cuenta estos dos factores. Al ingresar a las alturas superiores donde la hélice no logra «morder» eficientemente la rara atmósfera, el piloto accionaría palancas para retraer y plegar las hélices, desplegar las puntas de las alas y tirar del tren de aterrizaje.
Simultáneamente, el “motor del cohete” entra en acción, disparando desde las toberas los gases que lanzan el cohete a través del espacio. Cuando el avión cohete ha llegado a su destino y vuelve a entrar en los niveles de aire inferiores, los motores del cohete se apagan, las hélices, las puntas de las alas, los timones y el tren de aterrizaje se despliegan.
Entre las dificultades inmediatas de construir un avión cohete de este tipo está la necesidad de un metal adecuado para resistir las enormes fuerzas de erosión donde los chorros de gases golpean las turbinas cuyo trabajo es hacer girar las hélices a bajas altitudes. En las pruebas de cohetes actuales, mucho menos pretenciosas que el avión cohete patentado, ya se encuentra la dificultad porque parece imposible hacer un orificio que resista los chorros de gas que se escapan. Las aberturas funcionarán por un corto tiempo pero las altas temperaturas más la velocidad de impacto del gas contra el metal pronto las desgasta.
Los lanzamientos en el lago Greenwood
Aquí hay un monumento en la costa norte del lago Greenwood que dice: «Sitio del primer vuelo postal del avión cohete de EE. UU. 23 de febrero de 1936». La historia comienza en 1935 cuando un vendedor de sellos, Frido W. Kessler, pensó que podría beneficiarse haciendo que un avión cohete que transportaba correo entregara una bolsa de correo con sellos especiales de su propio diseño que luego podría vender como valiosos artículos de colección. Kessler formó Rocket Airplane Corp. y contrató a un inmigrante alemán reciente y experto en cohetes, Willy Ley, para diseñar el motor del cohete. Se encargó a una empresa de Long Island la fabricación del avión. Un aparte interesante es que Ley había salido de Alemania utilizando documentos falsos para viajar a Londres y luego a Estados Unidos para escapar del gobierno del Partido Nacionalsocialista de los Trabajadores Alemanes (NAZI). Sin embargo, algunas de sus ideas pueden haber contribuido al desarrollo de su V-1 Buzz Bomb. Ley era un conocido escritor científico. Y también trabajó para el desarrollo de cohetes estadounidenses junto con Wernher von Braun, quien ayudó a diseñar y desarrollar el cohete V-2 para Alemania durante la Segunda Guerra Mundial.
Entran GWL Village Treasure John Schleich y su hija, Gloria
El historiador de la aldea de Greenwood Lake, Wilbur Christman, autor de «Tales of Greenwood Lake», escribió que el tesorero de la aldea en 1936, John Schleich, también era un coleccionista de sellos que conocía a Kessler. Sugirió el lago, que limita con Nueva York y Nueva Jersey, como un buen sitio para un vuelo de correo aéreo interestatal con cohetes. La ubicación del lanzamiento sería en Sterling Forest, cerca de la frontera estatal. El primer día previsto fue el 9 de febrero de 1936. El evento fue ampliamente cubierto por los principales medios de comunicación y no todos los artículos informaron los mismos hechos. Pero Christman fue un testigo presencial, más familiarizado con Greenwood Lake, e informó que uno de los dos aviones que estaban disponibles para el lanzamiento fue bautizado como «Gloria» por Gloria Schleich, de 5 años, la hija de John y Mildred. Schleich.
El administrador de correos en Hewitt, N.J.
Debido a las heladas temperaturas, el bautismo del avión fue difícil, el champán se congeló, y ese fue el comienzo de una serie de percances que incluyeron el fallo del oxígeno líquido para encender cuando Willy Ley, vestido con un traje de asbesto, trató de encender el motor con un trapo empapado en gasolina. El lanzamiento, una decepción, generó muchas burlas y críticas por parte de las personas que habían llegado en autobús y automóviles, así como de los cámaras. El nuevo lanzamiento se pospuso por dos semanas. El 23 de febrero, los medios de comunicación y la multitud se reunieron nuevamente y, después de un despegue un tanto imperfecto, el avión aterrizó y patinó, despegó nuevamente, completó el vuelo de 400 yardas y finalmente se estrelló en Nueva Jersey. Christman cree que el vuelo duró menos de un minuto. Entonces Ley sacó el correo y lo cargó en un trineo, que el jefe de correos de Hewitt, Nueva Jersey, llevó a su oficina de correos y selló. Misión cumplida y los coleccionistas de sellos felices.
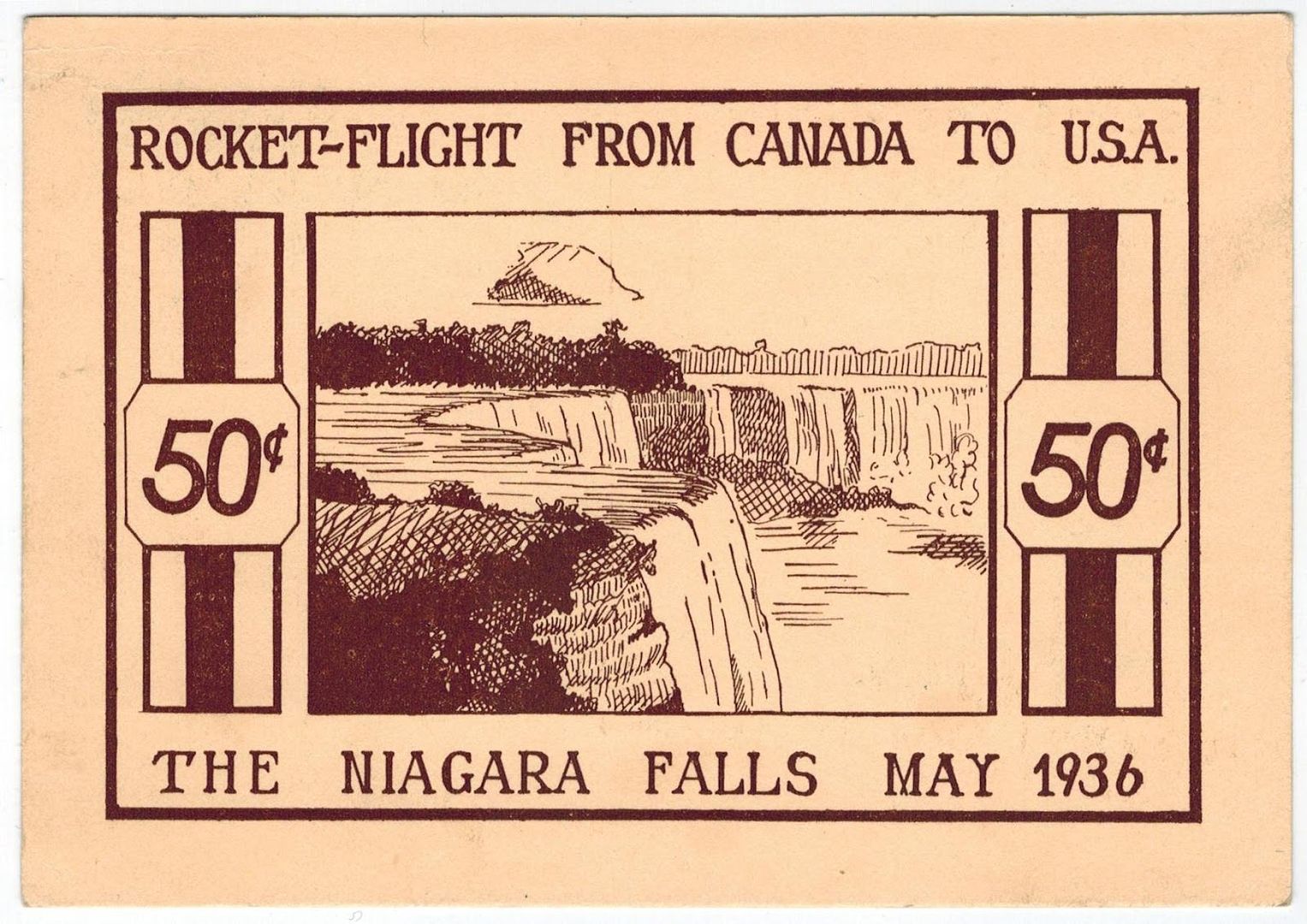
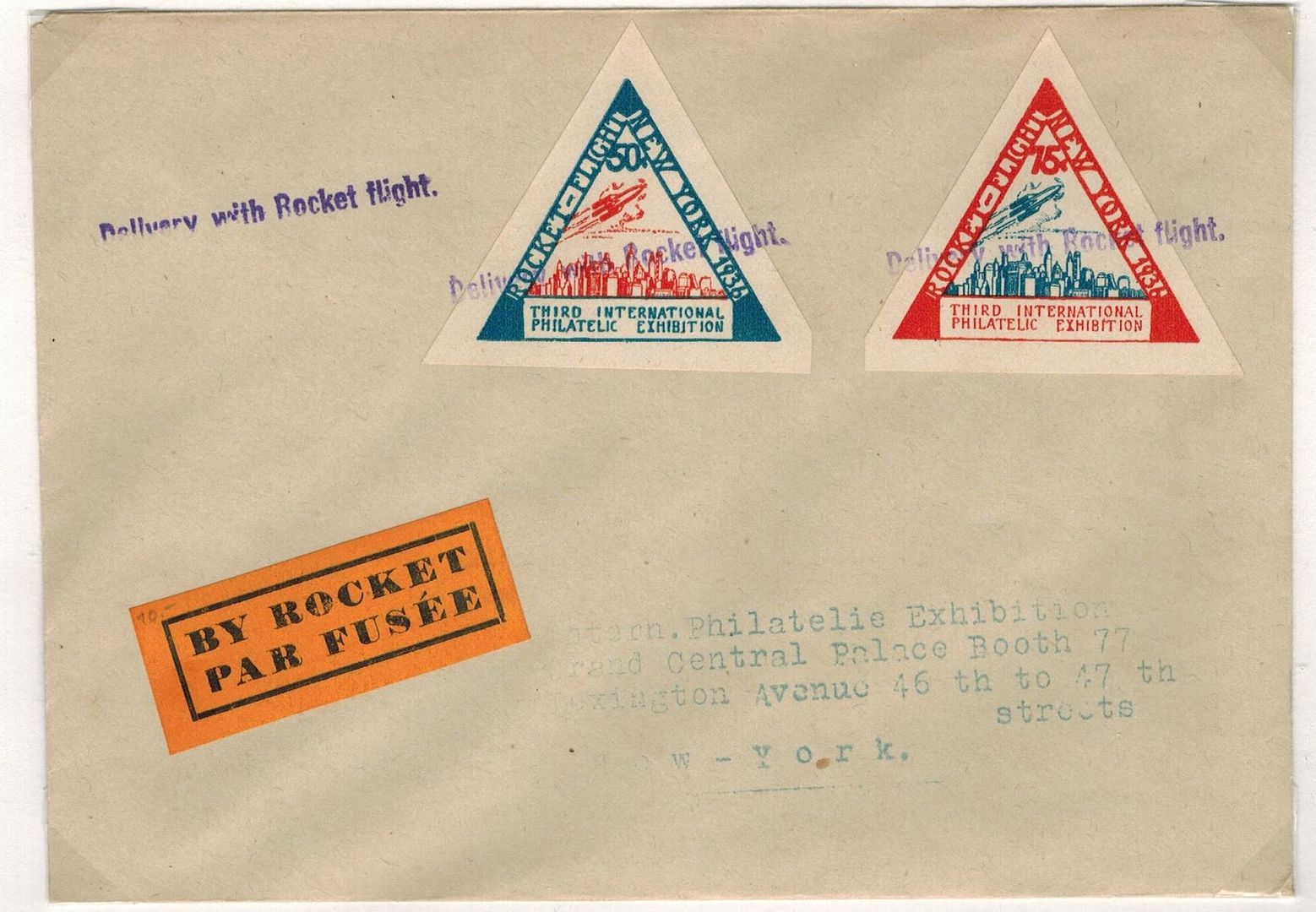
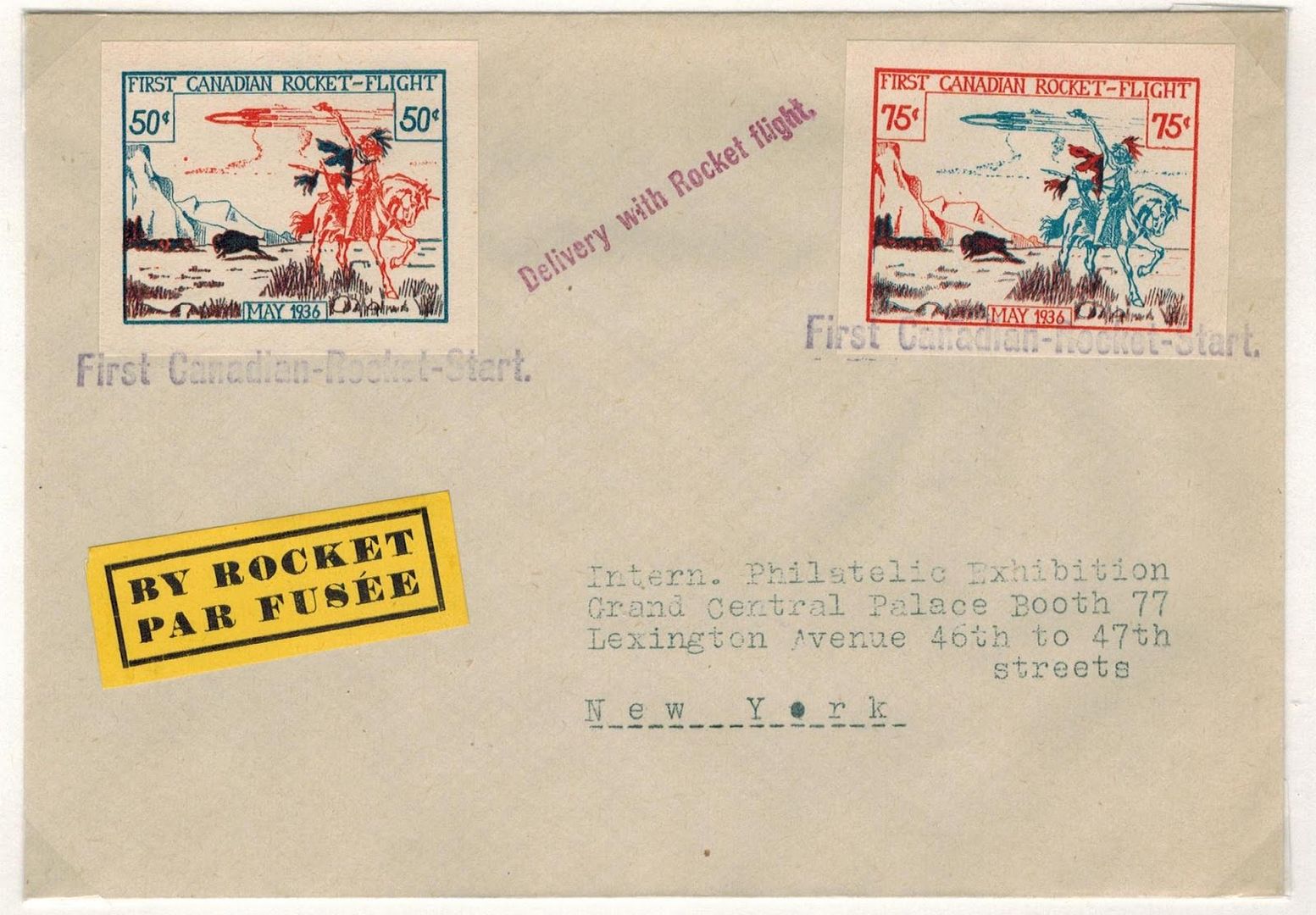
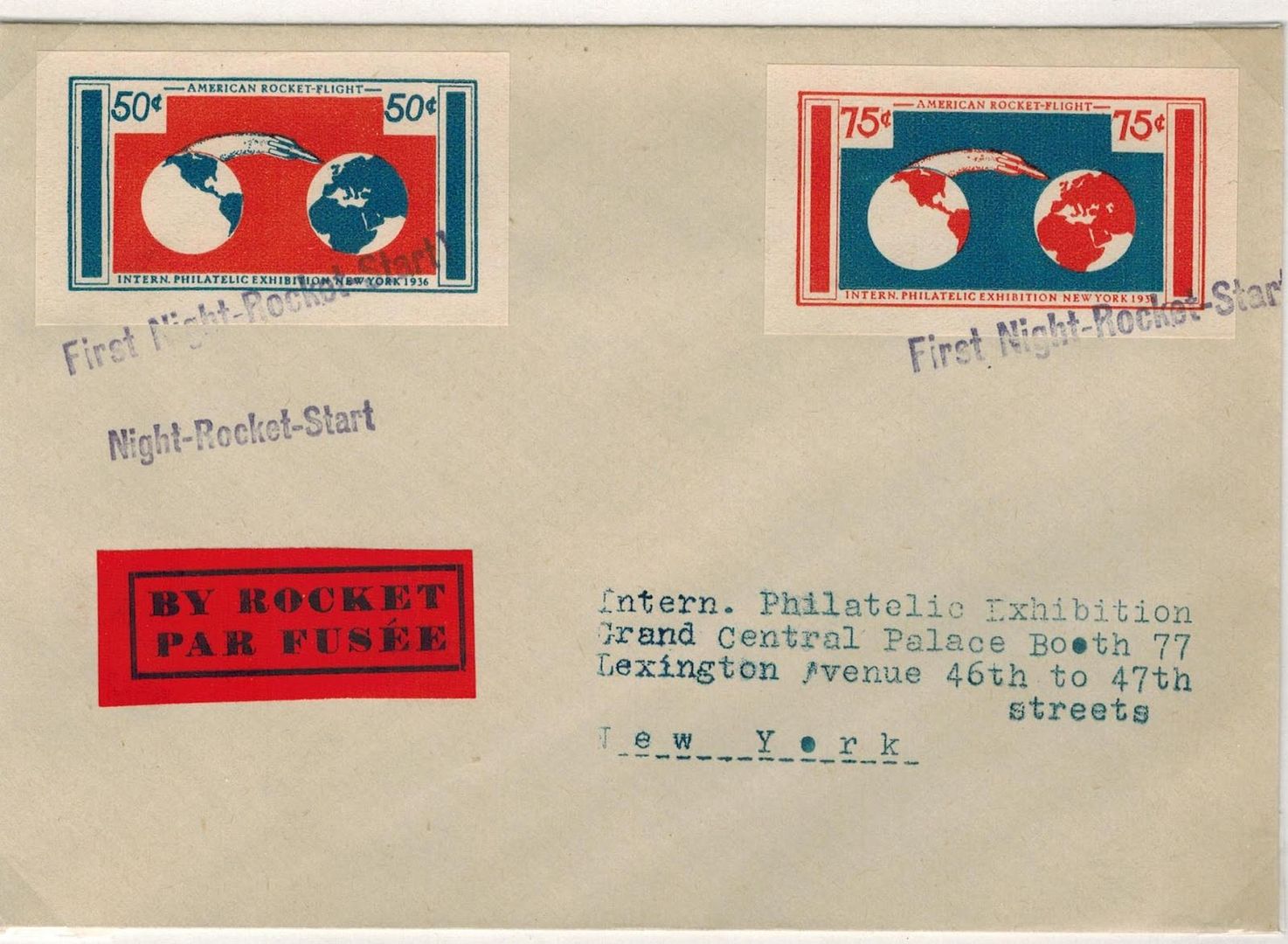
El envío de correo de Canadá a USA en las cataratas del Niagara (que no se produjo)
También en 1936 se quería lanzar el primer correo por cohete internacional, volando de Canadá a Estados Unidos en las cataratas del Niágara.
En 1934, el fabricante de cohetes alemán Gerhard Zucker intentó convencer a la oficina de correos británica de que la entrega postal por cohete era viable. Después de las demostraciones iniciales en Sussex Downs, Inglaterra, se lanzaron cohetes en Escocia, pero explotaron. En 1936, Zucker acordó realizar vuelos de cohetes en los EE.UU. y Canadá, durante la Tercera Exposición Filatélica Internacional (Third International Philatelic Exhibition – TIPEX) celebrada en Nueva York.
Zucker fue arrestado en Alemania antes de que pudiera llegar a Nueva York. El comerciante de sellos alemán, Karl Henning, había preparado sellos, sobres y matasellos, que llevó a TIPEX, junto con la plataforma de lanzamiento de cohetes.
Aunque el vuelo de las Cataratas del Niágara no tuvo lugar, quedan los sellos y los sobres.
El primer correo por cohete internacional que sí funcionó, o casi
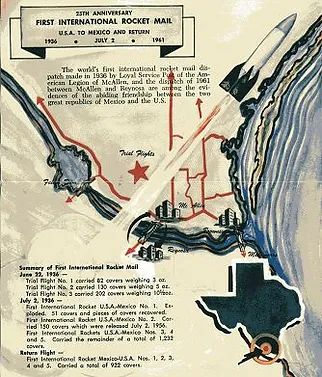
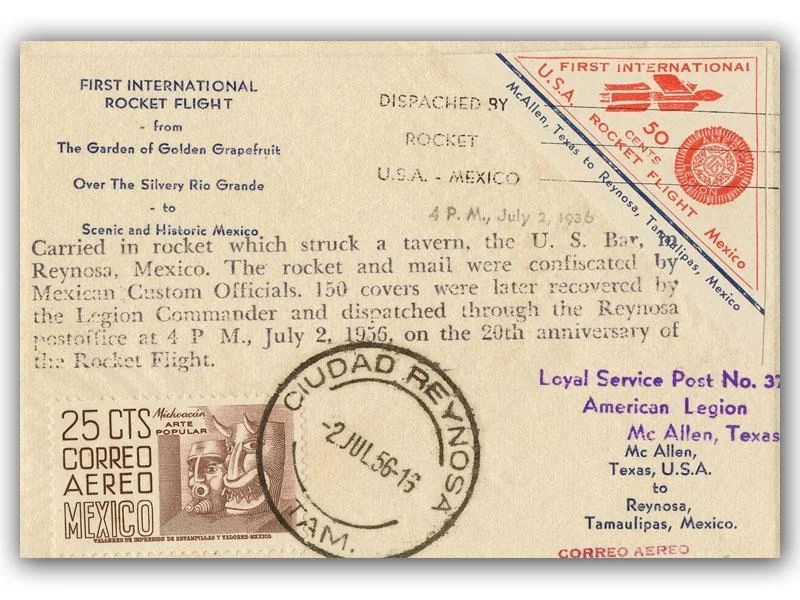
En 1936, un joven emprendedor entusiasta de los cohetes en McAllen, Texas, decidió que la forma adecuada de recaudar fondos para la delegación local de la Legión Americana era realizar un intercambio internacional de correo de cohetes. Por lo tanto, se dispararon cohetes llenos de postales con los sellos postales aéreos de EE.UU. y México y sellos conmemorativos sobre el Río Grande entre McAllen, Texas y Reynosa, Tamaulipas, México.
El evento no transcurrió sin contratiempos. El primer cohete estalló sobre el Río Grande, el segundo aterrizó en el centro de Reynosa, más bien se estrelló contra un bar, aunque causó daños mínimos, y un cohete disparado desde el lado mexicano aterrizó en el campo de un agricultor y provocó un incendio.
A pesar de estos percances, muchas de las postales fueron recuperadas y debidamente canceladas por los funcionarios postales de cada lado. Luego se vendieron a coleccionistas de sellos y otros entusiastas. ¿Qué fue del joven que ideó el evento? Keith Rumbel regresó a McAllen 25 años después… para lanzar más cohetes por el 25º aniversario del evento… aunque ya convertido en científico espacial.
Fuentes
The FIRST ROCKET AIR MAIL FLIGHT (May, 1936), Modern Mechanix
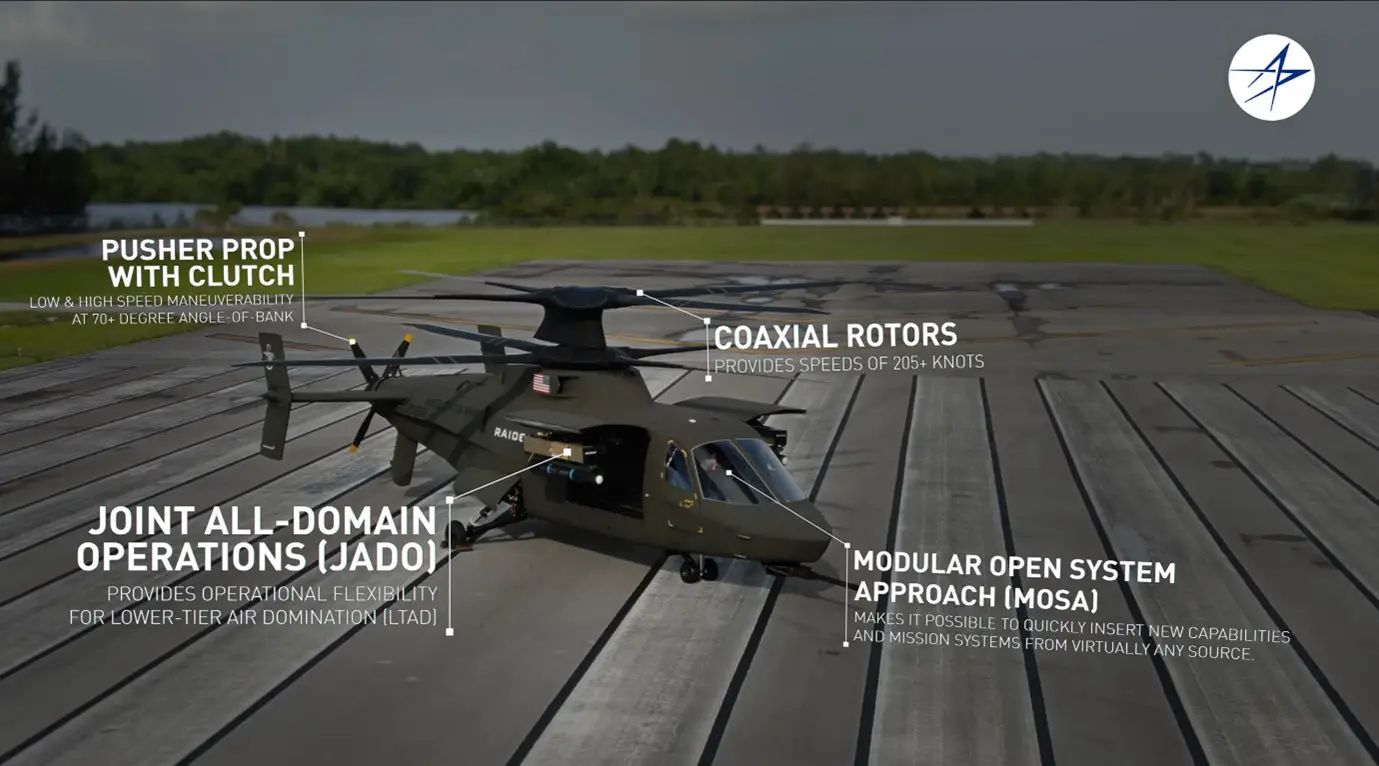
El prototipo RAIDER X fue presentado en la conferencia anual AUSA 2023.
La conferencia anual de la Asociación del Ejército de Estados Unidos (AUSA) 2023 se convirtió en el lugar donde Sikorsky finalmente reveló fotos de su proyecto para el Future Attack Reconnaissance Aircraft (FARA) del Ejército de Estados Unidos.
El programa FARA tiene como objetivo adquirir la próxima generación de helicópteros de reconocimiento, que ocuparán el lugar del retirado OH-58D Kiowa Warrior. El RAIDER X de Sikorsky compite contra el Bell 360 Invictus, tras el abandono del FARA por parte de Boeing, AVX/L3 Harris y Karem.
El RAIDER X es heredero de los resultados obtenidos con los programas S-97 y X2.
Durante el desarrollo, se hizo hincapié en el enfoque de Sistemas Abiertos Modulares (MOSA, por sus siglas en inglés) del Ejército de Estados Unidos para permitir futuras actualizaciones en la arquitectura del sistema.
Sikorsky dice que prototipo del RAIDER X está completo en un 98%, ya que la aeronave espera la finalización del Programa de Turbina de Motor Mejorado GE T901 (ITEP, por sus siglas en inglés). Con el nuevo motor programado para finalizarse a finales de este mes, el primer vuelo está programado para antes del cuarto trimestre de 2024.
General Atomics está desarrollando el sistema de línea de remolque en colaboración con Breeze-Eastern, un fabricante de cabrestantes para helicópteros en Nueva Jersey.
El concepto, llamado Sistema de Recuperación Aérea (ARS), prevé desplegar un cable de remolque desde un avión no tripulado grande para capturar aeronaves más pequeñas.
General Atomics reveló el 10 de octubre que realizó un vuelo de demostración del ARS el 20 de septiembre en el Campo de Pruebas de Dugway en Utah. La prueba involucró un MQ-20 Avenger (antes conocido como Predator C) de General Atomics equipado con un aparejo, como el anteriormente descrito, de Breeze-Eastern.
El cable del aparejo tiene instalado en su extremo libre un instrumento «inteligente» desarrollada por General Atomics e integrado en la bahía de carga del MQ-20.
Mientras estaba en vuelo, la línea de remolque se desplegó lejos del Avenger a la distancia óptima para la recuperación aérea. La característica del extremo inteligente pudo transmitir inalámbricamente al avión a ser recuperado su posición y las instrucciones para llegar al Avenger, confirmando su capacidad para transmitir los datos a un UAV, para recuperarlo en vuelo.
Una vez que un UAV ha sido asegurado en la línea de remolque, las alas de la aeronave se pliegan y se apaga el motor, lo que lo convierte en un cuerpo remolcado inherentemente estable.
Luego, las dos aeronaves regresarían juntas a la base para repostar, recargar o rearmar.
Estas plataformas serían lanzadas desde helicópteros del ejército, como el futuro helicóptero de reconocimiento y ataque (FARA, por sus siglas en inglés), o desde otras aeronaves y se utilizarían para apoyar a las tropas de tierra, bien realizando labores de reconocimiento o actuando como munición merodeadora.
Los vehículos ALE también podrían servir como puntos fieles para aeronaves tripuladas en espacios aéreos hostiles.
Según el ejército, un solo helicóptero FARA podría transportar hasta ocho vehículos ALE, todos los cuales colaborarán como enjambre, de manera semiautónoma, para desarrollar las misiones asignadas, un concepto que han llamado «manada de lobos».
Mientras el ejército visualiza los pequeños ALE como plataformas de bajo costo y fungibles, también está explorando una categoría de ALE más grande que llevaría sensores o cargas útiles más potentes y sería reutilizable, y potencialmente recuperable a través del ARS.
General Atomics está desarrollando actualmente un ALE grande al que llama Eaglet.
Nota de Prensa
General Atomics Aeronautical Systems, Inc. (GA-ASI) ha avanzado recientemente su Sistema de Recuperación Aérea para Sistemas de Aeronaves No Tripuladas Pequeñas/Efectos Lanzados desde el Aire (SUAS/ALE) al desplegar y retraer una línea de remolque con una «característica de extremo inteligente» desde un Sistema de Aeronaves No Tripuladas MQ-20 Avenger® de GA-ASI en pleno vuelo. La demostración tuvo lugar el 20 de septiembre de 2023 sobre el Campo de Pruebas de Dugway, Utah.
Durante esta demostración, se integró un aparejo de Breeze-Eastern equipado con la característica de extremo inteligente de GA-ASI en la bahía de carga del Avenger. Mientras estaba en vuelo, la línea de remolque se desplegó lejos del Avenger a la distancia óptima para la recuperación aérea. La característica de extremo inteligente pudo transmitir inalámbricamente su posición de vuelta al Avenger, confirmando su capacidad para transmitir los datos a un SUAS/ALE cercano para la recuperación aérea.
La posición «desplegada» de la característica de extremo inteligente se correlacionó con los modelos catenarios de elemento finito de múltiples grados de libertad de GA-ASI, confirmando su potencial para la recuperación aérea de SUAS/ALE.»La integración de UAS lanzados desde el aire de aeronaves no tripuladas del Grupo 5 es posible, en parte, gracias a los avances en tecnología de navegación relativa, análisis de líneas de remolque complejas y control de múltiples aeronaves que está siendo pionero por GA-ASI», dijo Mike Atwood, Vicepresidente de Programas Avanzados de GA-ASI. «Estamos emocionados de ver cómo esta tecnología permite cadenas de ataque de largo alcance desde los sistemas tripulados y no tripulados de hoy en día, apoyando operaciones en entornos altamente disputados».
Más allá de simplemente llevarlo de vuelta a la base, el SUAS/ALE puede ser repostado, recargado y/o rearmando y luego ser desplegado nuevamente. El despliegue puede ocurrir desde la aeronave anfitriona, lo que permite a los SUAS/ALE realizar sus propias órbitas desde posiciones de lanzamiento y recuperación en el aire. El despliegue aéreo permite que UAS como el Avenger de GA-ASI o el MQ-9A Reaper actúen como centros de mando móviles para una red de SUAS/ALE en una cuadrícula persistente y expansiva para vigilancia, ataque electrónico, supresión de defensas aéreas enemigas, vías de comunicación o comando y control móvil conjunto en todos los dominios durante días o semanas.
Los aparejos de rescate en helicóptero comerciales de Breeze-Eastern, con capacidades de rendimiento que cumplen o superan los requisitos del sistema, proporcionan un alto Nivel de Preparación Tecnológica (TRL) y ofrecen una solución de bajo riesgo para garantizar la recuperación aérea de SUAS/ALE. A lo largo de la integración del aparejo y las pruebas de vuelo, Breeze-Eastern proporcionó apoyo técnico y logístico.
Ian Azeredo, Ingeniero Jefe de Breeze-Eastern, comentó: «Con esta demostración histórica, GA-ASI ha vuelto a impresionar a la industria aeroespacial. El profesionalismo y la ingeniosidad quirúrgica mostrada en la fase de integración por el equipo de Recuperación Aérea garantizan prácticamente el éxito futuro del programa».
El novedoso concepto de recuperación aérea utiliza una línea de remolque y una característica de extremo inteligente, que sirve como faro e interfaz mecánica para la recuperación aérea. El SUAS/ALE calcula su posición precisa en relación con la característica de extremo inteligente para la navegación hacia la intercepción de la línea de remolque, seguida de una maniobra para capturar la característica final. Una vez asegurado en la línea de remolque, el SUAS/ALE pliega sus alas y detiene su motor para convertirse en un cuerpo remolcado pasivamente estable. Un aparejo en forma de cápsula a bordo de la nave capital recoge al SUAS/ALE en un estado de transporte cautivo donde las dos plataformas regresan juntas a la base.