«Ahora ANKA-3 vuela a alta velocidad subsónica. Pero se espera que su versión bimotor llegue pronto, será supersónica y acompañará a al caza KAAN. En el futuro, se espera que ANKA-3 vuele con 2 motores turbofán TEI-TF10000. Los trabajos de desarrollo del TEI-TF10000 continúan y se espera que, una vez completados, proporcione un empuje de 6.000lbf, de 10.000lbf con postcombustión», ha dicho Turan Orguz, destacado analista de defensa turco en Twitter.
Lo interesante de esos motores es que son de diseño turco y que reemplazarán a los reactores estadounidenses utilizados hasta ahora tanto en ANKA-3 como en KAAN.
Tusaş Genel Müdürü Temel Kotil :
Anka-3’ten Süper Şimşek’i fırlattığımız zaman,havadan havaya olan bu füze,düşmanın içinden geçecek ve hedefi 12 den vuracak.
Süper şimşek 36 kg harp başlığına sahip ve aralarında elektronik harp,elektronik destek gibi 11 farklı görevde… pic.twitter.com/IKNKSO7zTR
— Turkish Defence Agency (@tdefenceagency) May 18, 2024
A su vez, se están desarrollando armas para este avión de combate no tripulado. A mediados de mayo mostraban el misil Super Lightning, con una ojiva con una capacidad de carga de 36 kg, que prometen se podrán utilizar para cumplir hasta 11 misiones diferentes.
Turquía lleva años invirtiendo para convertirse en una potencia industrial y con capacidad de producir armamento propio. En tierra destaca su industria, conocida en occidente por sus autobuses, vehículos blindados y carros de combate. En el aire destacan sus desarrollos de helicóptero de combate, sus drones, posiblemente los más conocidos sean los Baykar TB-2, por Ucrania, el caza anteriormente conocido como TF-X o el entrenador Hürjet.
La inversión turca en defensa ha sido muy potente, y los desarrollos progresivos. Se comenzó haciendo mantenimiento propio en las aeronaves compradas a terceros países, se continuó fabricando bajo licencia y produciendo aeronaves basadas en éstas producidas bajo licencia, para terminar desarrollando desde cero aeronaves complejas.
Reseñar que ha jugado a su favor la falta de trabajo en el sector aeronáutico en Europa. Dada la baja carga de trabajo que hemos tenido los ingenieros del sector aeronáutico en Europa en estos últimos 10 o 15 años, ha sido muy sencillo para Turquía hacerse con expertos que quisieran trabajar para ellos. Ofrecían contratos por horas muy bien pagados, además de incluir el alojamiento o el transporte. Así pues, ingenieros europeos, formados en la industria europea y en las universidades europeas han sido los que han trabajado en estos proyectos y, lo que es más importante, formado a los ingenieros turcos que carecían de experiencia para desarrollar proyectos avanzados.
En una rueda de prensa, Peter Nilsson, responsable de la Unidad de Negocios de Programas Futuros de Saab, ha revelado los primeros detalles del sistema de combate aéreo de próxima generación.
Aunque Estocolmo había estado involucrado en una colaboración temprana con el Reino Unido en sus planes para un sistema de combate aéreo futuro, Peter Nilsson, jefe de la unidad de negocios de programas avanzados de Saab Aeronáutica, dijo que: «Suecia decidió, con todas las cosas que están sucediendo – la guerra en Ucrania, la membresía en la OTAN y un presupuesto de defensa aumentado – tomar un respiro y ver hacia dónde vamos a ir».
Dado el ambicioso calendario del programa y con el Gripen E de Saab entrando en servicio en la fuerza aérea sueca el próximo año, un enfoque potencial a corto plazo podría ser el desarrollo de una plataforma no tripulada como una aeronave de combate colaborativa.
A timeline of #Sweden's future fighter programme. Though referred to in the Saab briefing as KFS (which I assume is Konceptet Framtidens Stridsflyg – Future Combat Aircraft Concept), here it is FCAS. So yes, there are three different FCAS projects ongoing in Europe right now! 1/3 https://t.co/Mve5KqQSkrpic.twitter.com/ehpxFXTTYi
El estudio preliminar, lanzado en julio de 2023 y confirmado en marzo de 2024, concluirá en 2025. Se ha desarrollado en colaboración entre la fuerza aérea, la Administración de Material de Defensa, la Agencia de Investigación de Defensa suecas y Saab.
Posteriormente, la empresa iniciará una fase de cuatro años para la selección y desarrollo de las tecnologías consideradas relevantes (2026-2030), para luego avanzar, a partir de 2031, hacia el desarrollo de los sistemas.
El programa es conocido genéricamente como Future Fighter System (FFS o KFS según Flight Global) e incluirá el desarrollo del caza ligero (al estilo del Checkmate ruso), monomotor así como de los aviones no tripulados que acturarían en conjunto con los cazas como puntos fieles o en enjambre, y ambos serían complementados por futuros desarrollos de los Gripen E.
Se están realizando investigaciones paralelas y complementarias en tecnologías furtivas y de baja observabilidad, bodegas de armas internas, comunicaciones y electrónica, la integración de un radar AESA en la estructura de la aeronave, inteligencia artificial y armas autónomas. Algunos de los conceptos de «punto fiel» incluso se han probado ya en túnel de viento.
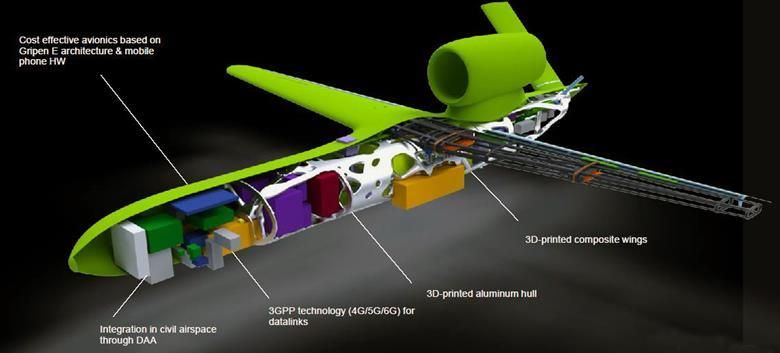
El fabricante de aeronaves destaca que una aeronave no tripulada representada junto a su Gripen E en la imagen que encabeza este texto «es solo una impresión artística de uno de los muchos conceptos que Saab está investigando actualmente junto con el cliente».
Por otro lado, la aceleradora de tecnología The Rainforest de Saab tiene planes de volar su vehículo aéreo no tripulado Ruby en el campo de pruebas de Vidsel, a lo largo de este año
Con un fuselaje impreso en 3D y un ala de 6-7m de envergadura, estará propulsado por un motor GE Aerospace J85 proveniente de un avión de entrenamiento Saab 105.
Europa necesita un avión de transporte militar de gran tamaño, hasta ahora se habia confiado, tal vez en exceso, en la disponibilidad barata de los An-124
Estados Unidos tampoco tiene sustituto para sus C-5
An-124 transportando un fuselaje de Su-100
Antes de la invasión rusa de Ucrania, Europa se volvió muy dependiente de los An-124 operados por Antonov Airlines a través de iniciativas como la Solución Internacional de Transporte Aéreo Estratégico (SALIS) de la OTAN. Pero la flota de An-124 disponibles para chárter se ha reducido a cinco. Además se perdió el An-225, el carguero más grande que había disponible a nivel mundial y del que sólo se había fabricado una unidad completa, y una segunda que se usaba como fuente de repuestos, fue destruido en el aeródromo Gostomel de Kiev el día inaugural de la invasión.
Por ello, un consorcio liderado por Airbus está estudiando opciones para proporcionar a Europa avión de transporte estratégico de un tamaño equivalente al An-124. Otros participantes en ESOCA incluyen Leonardo Aircraft, la española ITP Aero y Safran Aircraft Engines. En total hay 15 participantes industriales de siete países europeos.
El estudio ha recibido el nombre de ESOCA, European System for Outsized Cargo Airlift.
ESOCA parece basarse en la iniciativa de Strategic Air Transport for Outsized Cargo Permanent Structured Cooperation (PESCO), que fue lanzada por Alemania y respaldada por la República Checa, Francia y los Países Bajos.
Los esfuerzos de ESOCA son independientes de los proyectos Futura carga táctica de tamaño mediano y Futuro sistema aéreo para transporte táctico europeo que se centran en el desarrollo de un futuro avión de transporte táctico europeo, conocido por algunos como A-200M, y que vendría a ser el reemplazo del Hércules.
A corto plazo, y con A-380s disponibles a bajo coste, tal vez sería interesante terminar aquella variante cancelada del A-380F, para mover cargas en palets y contenedores estándar. Y a más largo plazo, una aeronave con rampa de carga y bodega baja, al contrario que el Beluga, para cargas de gran tamaño y vehículos. A medio plazo, lo interesante sería una alianza con la industria ucraniana, que posee experiencia en diseño, mantenimiento y operación de aeronaves de este tamaño, y crear un nuevo An-124, actualizando sus materiales, motores y aviónica. De esta alianza estratégica saldrían, además, ganando todos los socios. Los países europeos ganarían conocimientos en aviones de transporte táctico de gran tamaño, y los ucranianos ganarían experiencia en nuevos materiales y acceso a nueva tecnología. Y se contribuiría a su reconstrucción y re-industrialización, aunque en estos momentos la planta de producción no pudiera estar sita en Ucrania.
La última ronda de financiación para programas de investigación y desarrollo es parte de los esfuerzos de la Unión Europea para reforzar las capacidades de la industria de defensa europea y alentar a los estados miembros a trabajar con otros y comprar equipos de defensa europeos.
ESOCA es uno de los 54 proyectos europeos conjuntos de investigación y desarrollo de defensa aprobados para su financiación por la Comisión Europea a través del Fondo Europeo de Defensa (FED). Los acuerdos de subvención para los 54 programas se finalizarán a finales de año, dicen los funcionarios.
El FED está aportando algo más de mil millones de euros (1.080 millones de dólares) a alrededor de una docena de proyectos aeroespaciales y de misiles. Los comisionados dicen que hay un interés creciente en el FED, y la industria presentó 236 propuestas para proyectos de investigación y desarrollo en respuesta a la convocatoria de propuestas de 2023.
Una aeronave VTOL es aquella que despega y aterriza en vertical. Y hay muchas formas de lograrlo, bien con alas rotatorias, como los helicópteros, bien con rotores basculantes como los convertiplanos… Y, como todo diseño, cada cual tiene sus ventajas y desventajas.
Los tail-sitter son aquellas aeronaves VTOL que despegan desde una posición morro arriba, sentadas en su cola. Son, posiblemente de los diseños más antiguos que hay, por su simplicidad.
Ya sabemos que los helicópteros, siendo una excelente máquina VTOL, tiene como inconvenientes su elevado consumo y su limitada velocidad de crucero.
Los convertiplanos tienen como desventaja la complejidad de los mecanismos para bascular el rotor, los problemas estructurales que introduce la precesión giroscópica del mismo, y el coste que tienen, amén de la resistencia aerodinámica y los efectos que tiene el que el ala esté en perpendicular del flujo del aire de los rotores durante el vuelo «como helicóptero», salvo que el ala entera pivote, y no solo los rotores, lo que trae otro montón de problemas.
Los tail-sitter carecen de todos estos problemas. Son aeronaves «convencionales», con un par de rotores más grandes, lo suficiente como para dar un empuje igual al peso y levantar toda la aeronave y su carga de pago, pero no tiene ningún tipo de mecanismo adicional que haga pivotar los rotores. Es toda la aeronave la que rota sobre su eje de cabeceo hasta alcanzar la posiciòn horizontal de vuelo. De este modo puede conseguir mayores velocidades que los helicópteros, con mucho menor consumo, sin los problemas de los rotores basculantes que ya hemos mencionado.
Y si son tan buena solución de diseño, ¿cómo es que no tenemos los buques de nuestras armadas llenos de ellos? Porque hasta ahora se han probado tripulados. Y el mayor problema de estas aeronaves es su operación tripulada. ¿Os imagináis al piloto aterrizando con la mano en el respaldo del asiento del copiloto y mirando hacia atrás por encima del hombro? De hecho hay muchos proyectos históricos que fracasaron, entre otros motivos por este, como por ejemplo el Convair Pogo.
Pero ahora, que es la era de las aeronaves no tripuladas, puede ser su momento. Tan solo necesitan un sistema de control de ciclo cerrado y caracterizar adecuadamente las leyes que gobiernan su vuelo. Y eso es lo que va a hacer Sikorsky con esta aeronave para DARPA.
Sikorsky, una compañía de Lockheed Martin (NYSE: LMT), está llevando a cabo pruebas de vuelo para perfeccionar las leyes de control y la aerodinámica de un novedoso sistema aéreo no tripulado de despegue y aterrizaje vertical (VTOL / UAS). Las pruebas de vuelo tienen como objetivo demostrar la eficiencia y escalabilidad de una configuración de doble rotor y ‘ala soplada por rotor’ que se coloca en posición vertical para despegar y aterrizar como un helicóptero, y transita fácilmente a un vuelo horizontal hacia adelante para misiones de larga duración, como inteligencia, vigilancia, reconocimiento y designación de objetivos.
Las pruebas de vuelo en curso respaldan la iniciativa Ancillary de la Agencia de Proyectos de Investigación Avanzada en Defensa (DARPA), que busca desarrollar un UAS VTOL X-Plane de Clase 3 que pueda operar en la mayoría de las condiciones climáticas desde cubiertas de barcos y superficies no preparadas sin infraestructura. Sikorsky es uno de varios competidores seleccionados para avanzar sus diseños conceptuales de UAS a la siguiente fase de desarrollo.
El término ‘ala soplada por rotor’ se refiere al flujo constante de aire procedente de las hhélices y que fluye a través del ala. Sikorsky eligió el diseño para reducir la resistencia en el ala en modo de hover y al transicionar al vuelo hacia adelante, y para aumentar la eficiencia de crucero y la resistencia.
El diseño es solo una de las muchas formas en que Sikorsky está avanzando en tecnologías e innovaciones de Seguridad del Siglo XXI®, dijo Igor Cherepinsky, director del grupo de prototipos rápidos Sikorsky Innovations.
«Las pruebas de vuelo están en curso para verificar que nuestro UAS de ala soplada por rotor de posición vertical pueda despegar y aterrizar verticalmente con alta estabilidad, y volar eficientemente en ala», dijo Cherepinsky. «Los habilitadores clave para la maniobrabilidad de vuelo y la escalabilidad del vehículo en el futuro son nuestro sistema de control de vuelo de autonomía MATRIX, y un sistema de rotor articulado similar a los de los helicópteros tradicionales».
Para las pruebas de vuelo que se están llevando a cabo actualmente, Sikorsky está volando un vehículo de prueba alimentado por una batería. Si es seleccionado para producir un vehículo aéreo para una futura fase ANCILLARY, Sikorsky planea construir una versión híbrida-eléctrica de 300 libras que incluya una carga útil ISR de 60 libras.
Sikorsky Innovations se formó en 2010 para superar los desafíos tecnológicos de la velocidad, autonomía e inteligencia de las alas giratorias, Aprende más sobre los logros del equipo de ingeniería en velocidad e inteligencia, y su enfoque actual en la electrificación y UAS VTOL para apoyar las misiones de Seguridad del Siglo XXI®.
No es la primera vez que hablamos de helicópteros tripulados convertidos en no tripulados u opcionalmente tripulados en el blog. Pero posiblemente sea la primera vez que hablamos de uno de Airbus militar y para los Estados Unidos. Como comentamos no hace mucho en Linkedin, la guerra de Ucrania ha cambiado mucho la percepción de los helicópteros en guerra, tanto que se ha cancelado el programa FARA, y es normal que se potencie sus versiones no tripuladas. Y las fuerzas armadas de USA ya probaron en servicio, incluso en Afganistan, una versión no tripulada del Kaman K-MAX, como aeronave para transportar carga. Tambiñen han ensayado profusamente el MQ-8C Firescout, una conversión del Bell 407.
Y en este imparable avance en la introducción de tecnología que convierte en aeronaves no tripuladas las que han de llevar a cargo las misiones peligrosas, «sucias» (con riesgo NBQ) o tediosas, tras conversiones de otros grandes fabricantes de helicópteros, ha llegado el turno del Lakota de Airbus.
El Comando de Sistemas Aéreos Navales de los Estados Unidos (NAVAIR), en nombre del Cuerpo de Marines de los Estados Unidos (USMC), ha firmado un contrato con Airbus US para adquirir una versión no tripulada de su UH-72 Lakota, anunció la empresa el 14 de mayo.
Los helicópteros están siendo considerados para el programa de Aerial Logistics Connector del USMC. Se espera que los helicópteros no tripulados se sometan a pruebas, en competencia con otras aeronaves, de las que aún no tenemos noticias, aunque no sería raro ver a Sikorsky con su sistema de control Matrix. Se espera una selección final poco después.
El trabajo en el concepto de UH-72 no tripulado ha estado en curso durante aproximadamente un año, dijo Carl Forsling, director senior de desarrollo de negocios y estrategia de Airbus, a Janes el 1 de mayo en la convención Modern Day Marine 2024 en Washington, DC, donde se mostró un modelo del concepto.
El programa de Aerial Logistics Connector es uno de los tres programas de evaluación de VTOLs para el USMC, que busca mejorar sus capacidades de cara a los conflictos del futuro. El servicio seleccionó el TRV-150C de Survice Engineering Company para logística a nivel de escuadrón ( Sistema de Aeronaves no Tripuladas de Reabastecimiento Táctico — TRUAS). Para el programa de Vehículo de Reabastecimiento Medio probará otras dos aeronaves no tripuladas, Kargo de Kaman(del que os hablamos aquí), y el Chaparral de Leidos y Elroy Air, para el programa de Vehículo de Reabastecimiento Aéreo Medio – Logística Expedicionaria (MARV-EL).