En 1915 no había aviones doblemando. Había que aprender en aviones monoplaza. Y se idearon toda suerte de proto-simuladores de vuelo. Este tipo de simuladores eran “aviones” hechos para no volar. Tenían poca potencia y alas tan cortas que no permitían el vuelo, salvo –si ha caso- pequeños saltos dentro del efecto suelo.
En México este tipo de simulador era llamado “aviones de carreras por tierra”,”taxis” o, simplemente, “aviones de escuela”.
Como sus primos franceses, contaban con todas las características con las que contaban los aviones a los que los pilotos se iban a enfrentar después: volcaban con facilidad, eran inestables y carecían de frenos. Y es que la idea de este particular invento del demonio era acostumbrar a los pilotos a lo que se iban a encontrar después… pero sin miedo a que se fueran al aire, o a perder un avión complejo, caro, y costoso de reparar o conseguir repuestos. A las particulares carreras por tierra, “sin frenos y a lo loco”, las llamaban los pilotos “la repartición de tierras”.
Martin Pusher «Sonora»
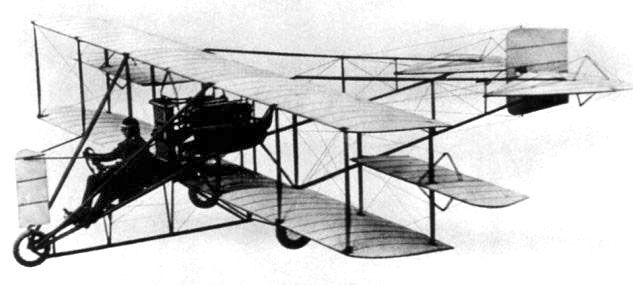
Hemos encontrado que se utilizaron dos tipos de guajolotas. Una, diseñada como tal, a partir de los restos de un biplano Martin Pusher, bautizado como Sonora, y participante en el primer combate aeronaval mexicano, con motor Ford y un diseño que recuerda al de los Demoiselle.
Y el otro el llamado Biplano TNCA serie A, un proyecto mexicano para tener un avión de fabricación propia, que consistió en convertir un monoplano Morane-Moisant en biplano, utilizado parece ser en las «reparticiones de tierras», al menos según se ve en la caricatura publicada porMexicana Aviation History.
Si recordamos la entrada reciente acerca de los simuladores de vuelo, uno de los primeros conceptos de diseño se basaba en un avión cautivo, articulado sobre una rótula esférica o una junta universal, para permitirle los giros en los tres ejes (cabeceo, alabeo y guiñada).
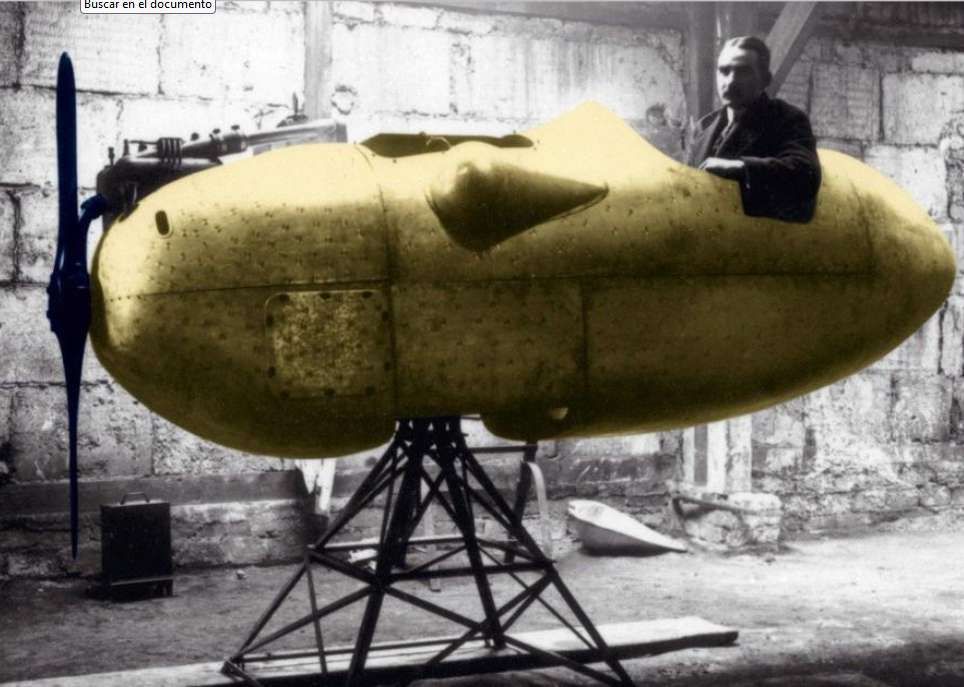
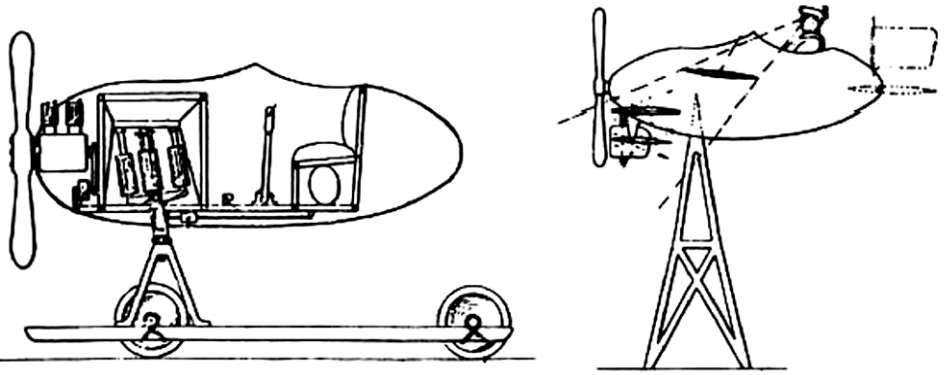
El Piloteur o sistema de Lender & Heidelberg incluía, además, un un motor de aire comprimido que movía una hélice que, a su vez, se encargaba de soplar con suficiente fuerza los timones como para tener mando aerodinámico del avión. Así se basaba en los mismos principios que los anteriores, solo que incorporaba su propia fuente de viento.
Fue patentado en 1917 por el teniente Lender y por Paul Heidelberg. Aunque se presentó al Comité Técnico de Aeronáutica de la Dirección de Invenciones de Francia, no se empezó a utilizar hasta después de la guerra, realizándose las primeras experiencias en 1920.
Y nos atrevemos a decir que fue, posiblemente, el primer simulador de vuelo recreacional, puesto que fue instalado en las galerías parisinas Lafayette para disfrute del personal.
La necesidad de aprender a volar sin arriesgar la vida del aprendiz ni la máquina ha sido patente desde el comienzo de los vuelos. Ya hemos visto muchos casos en este blog, en unos casos recurrían a situar manualmente al alumno piloto en una posición anormal y que el alumno tuviera que volver a la horizontal manejando los mandos, como en el caso de Antoinette. En otros casos se recurría a ventiladores para simular la corriente de aire sobre un avión, o incluso a remolcar el simulador con un coche, teniendo así mando aerodinámico.
Los que hoy presentamos se basan todos en el mismo principio de funcionamiento: un avión instalado sobre una junta universal o una rótula esférica que recurre al viento para generar fuerzas aerodinámicas sobre sus superficies de control y, de este modo, tener mando aerodinámico y simular los movimientos del avión en, al menos, los tres ejes de rotación: cabeceo, alabeo y guiñada.
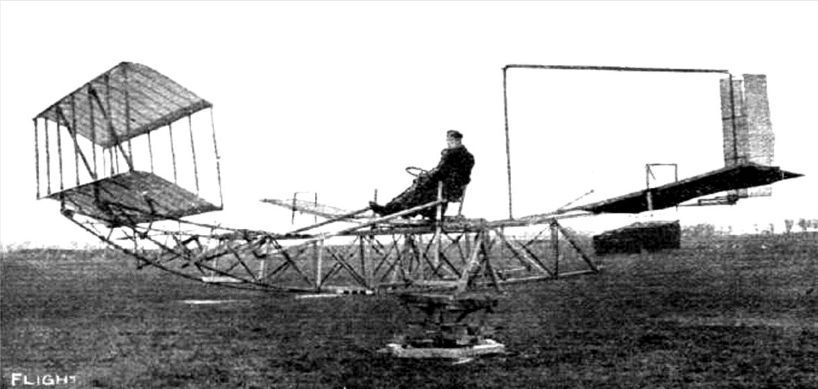
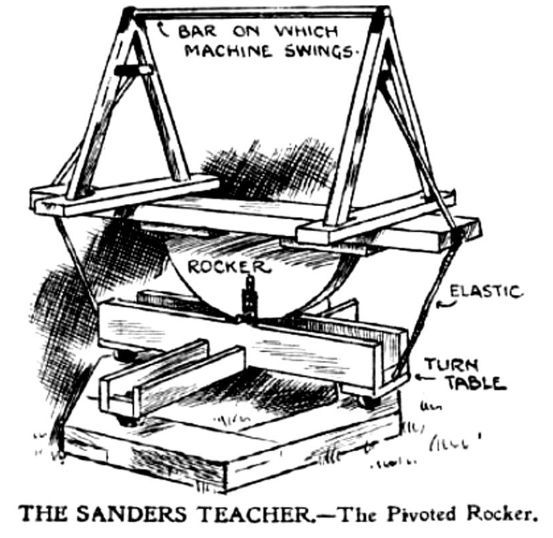
Sanders Teacher, un simulador de vuelo – 1910
Flight, en su número de diciembre de 1910, publicó
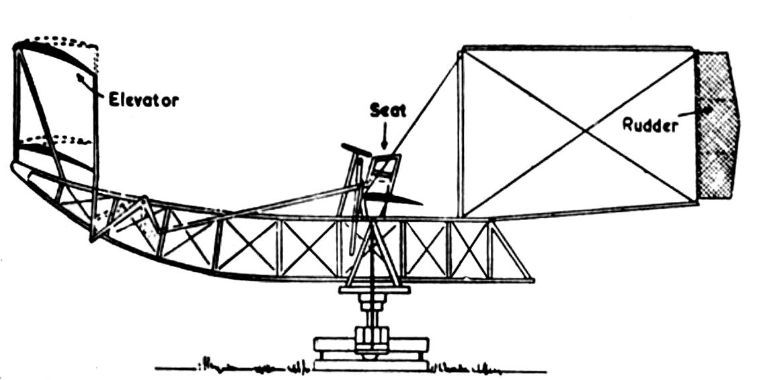
La invención, por lo tanto, de un dispositivo que permitirá al novato obtener una idea clara del funcionamiento de un avión y las condiciones existentes en el aire sin ningún riesgo personal o de otro tipo debe ser bienvenida sin duda. Ya se han probado varios y el Sanders Teacher es el último en entrar al campo.
El Teacher se construyó a partir de componentes de aviones reales. De hecho era un avión real montado sobre una junta universal. No podía volar, pero sí reaccionar a las fuerzas aerodinámicas cuando se encaraba al viento. ¿Desventajas? Si no había viento o no tenía la velocidad suficiente, el simulador no funcionaba. Por eso otros aparatos similares recurrieron a ser arrastrados por vehículos o situar frente a ellos grandes ventiladores.
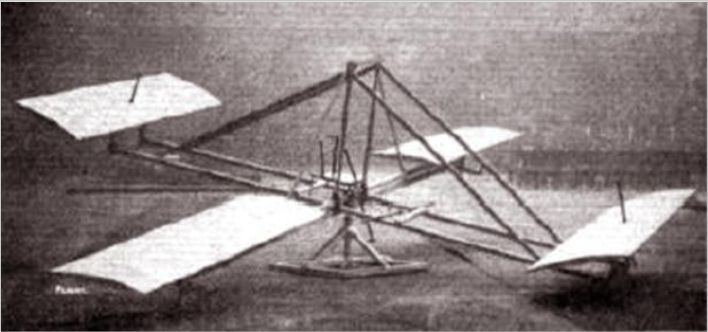
Billing Oscilator – 1910
Similar al anterior, podemos encontrar el sistema desarrollado por Eardley Delorney Billing, el «Billing Oscilator«. Una vez más, un avión sobre una articulación esférica bajo su centro de gravedad, y superficies móviles que movían el avión en sus ejes de rotación (cabeceo, alabeo y guiñada) si el viento era suficientemente fuerte como para generar fuerzas aerodinámicas.
Fue ensayado en el aeródromo de Brooklands y, como el sistema anterior, apareció publicado en Flightdel, el 19 de noviembre de 1910.
Sistema Gabardini
Otro simulador que utilizaba el mismo sistema era el de Gabardini. Creado por Giuseppe Gabardini (1879-1936), propietario de la Società per la Construzione de Velivoli en Novara, para aprender a manejar sus aviones.
Básicamente era uno de sus aviones unido a la articulación esférica. Además, este sistema contaba con cables de seguridad que impedían que el avión cautivo sufriera daños si llegara a tocar el suelo con alguno de sus extremos.
Cabe destacar que Gabardini crearía otros dos sistemas, además de éste ideado para familiarizarse con el uso de las palancas de mando. De los otros dos, uno sería para aprender a carretear el avión y el otro un par de ruedas adicionales para evitar el capotaje del avión durante las fases iniciales en las que el alumno piloto aprendía a aterrizar.
Y ya sabéis, si os ha gustado la entrada, ¡seguidnos!
Fuentes
FLIGHT SIMULATION IN CIVIL AVIATION ADVANTAGES AND DISADVANTAGES. Tomasz BALCERZAK, PhD. Eng.;Katarzyna KOSTUR, Magistry Eng. en Revista europea de derecho de la navegación marítima y aeronáutica
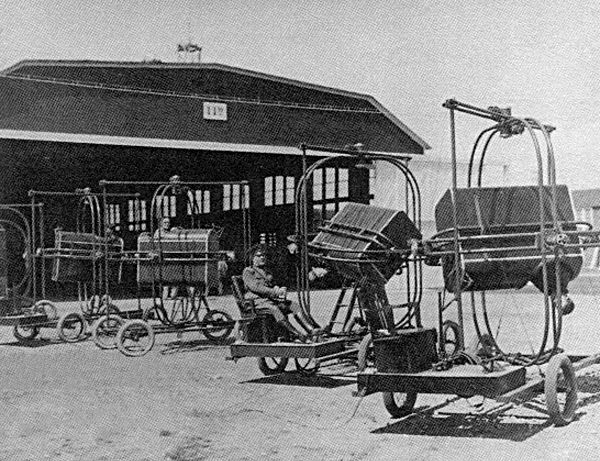
Obsérvese la posición del piloto a la derecha del todo, ¡y que está sin instructor!
Desde el comienzo de los tiempos -aeronáuticos- quedó claro que tener aviones que no volaran sería útil para entrenar a los pilotos a volar. Memorizar procedimientos, aprender técnicas… antes de subir a un avión doble-mando ¡en el mejor de los casos!
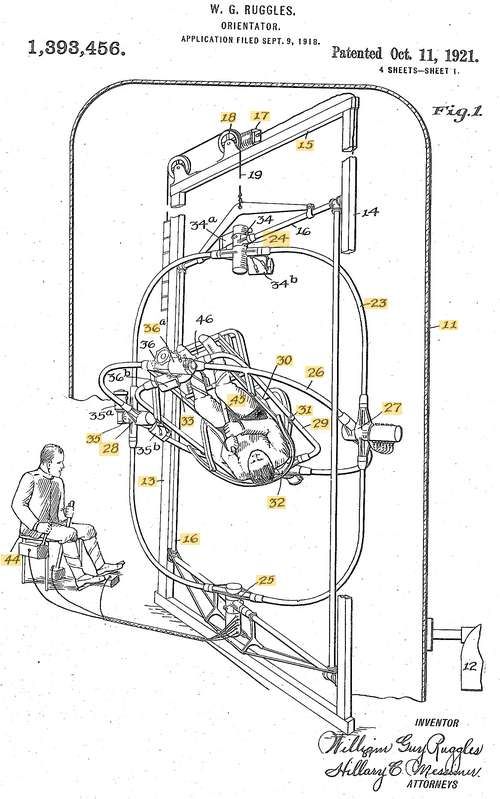
El simulador de Ruggles era una cabina montada en un cardan. La cabina tenía así tres grados de libertad de giro (alabeo, cabeceo y guiñada) y uno de desplazamiento (el vertical).
Servía para aprender los rudimentos del manejo de los mandos del avión. Pero también podía servir para aprender a recuperar posicionesa normales: El instructor, sentado fuera del simulador, mediante mandos eléctricos, cambiaba la actitud de la cabina y el piloto, mediante los mandos del avión debía recuperar la horizontalidad.
Instructor de vuelo y alumno utilizando el simulador de Ruggles
El Ruggles Orientator se utilizó tanto como dispositivo de selección de pilotos como herramienta de formación. Su uso continuó después de la guerra y la revista Popular Science defendió su uso en julio de 1919: “La práctica en el orientador desarrolla el ‘sentido del movimiento del oído’, que servirá al piloto cuando el sentido muscular y la vista no lo hagan (p. 63).”
Por desgracia, no se supo hasta mucho después de la Primera Guerra Mundial que cualquier «sentido del movimiento del oído» sería inadecuado y que la desorientación espacial requería instrumentos y entrenamiento adecuados para superarla.
Imagen de la patente de Ruggles
Fue inventado por William Guy Ruggles (1883-1914) y empleado por la escuela pilotos del ejército francés a partir de 1915. El invento fue presentado en Estados Unidos el 9 de septiembre de 1918, aplicado para la selección primaria de pilotos de combate y patentado el 21 de octubre de 1921.
Según los criterios de la época, podía evaluar los tiempos de reacción del alumno y detectar desórdenes en el sistema vestibular. Por ello se empleó posteriormente en medicina aeronáutica.
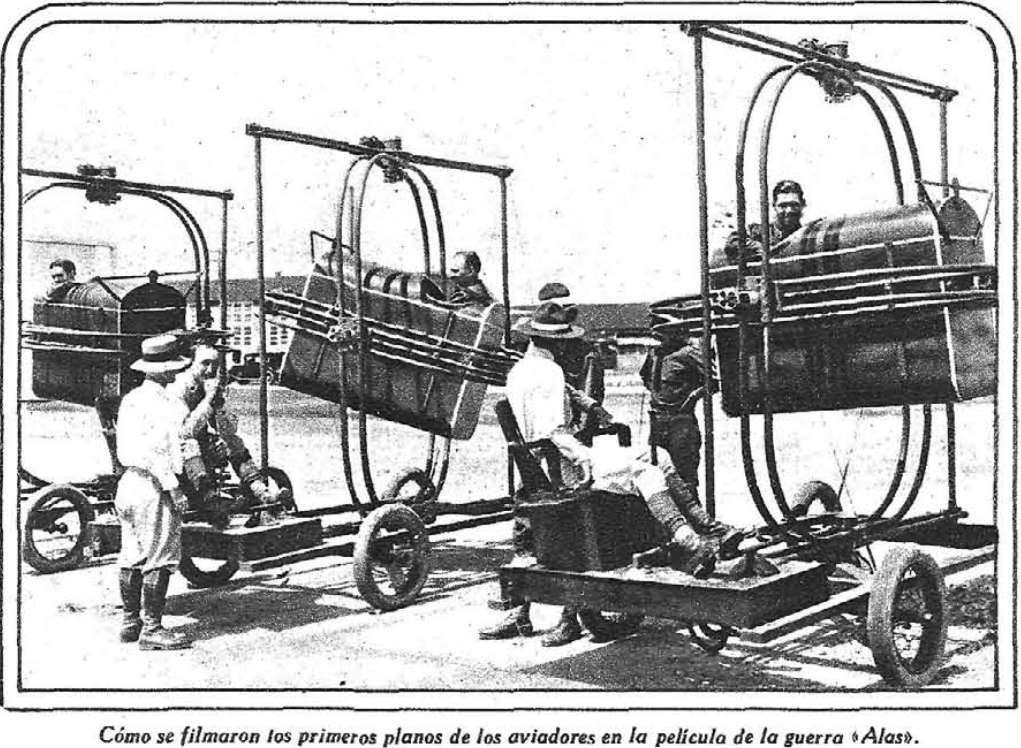
No sólo se usó para selección o entrenamiento de pilotos
En la primera ceremonia de los Oscars la mejor película fue «Alas» (1927). Y el simulador de vuelo sirvió para poder grabar las escenas en las que se veía en primer plano al actor mientras volaba el avión, como nos contaba la revista Estampa.
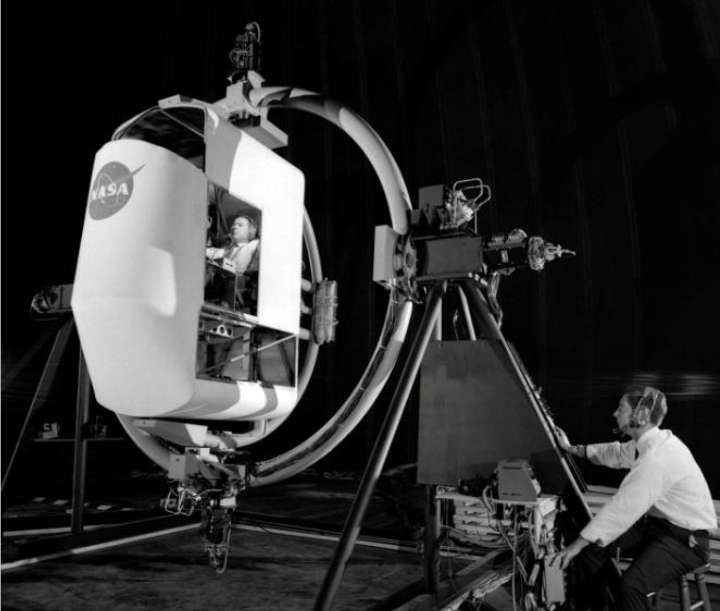
El simulador, o un derivado del mismo, llegó a tiempo para entrenar a los astronautas a aterrizar en la Luna
Esta plataforma, modificada y puesta al día, continuó empleándose en la formación y capacitación de astronautas en la NASA
Y ya sabéis, si os ha gustado la entrada, ¡seguidnos!
Como última entrada de este año 2022, vamos a traer un invento español. ¡Esperamos que la disfrutéis!
En el blog hemos ido presentando distintos simuladores o protosimuladores de vuelo fabricados en casi todo el mundo. Y, como no, en España también se diseñó al menos uno.
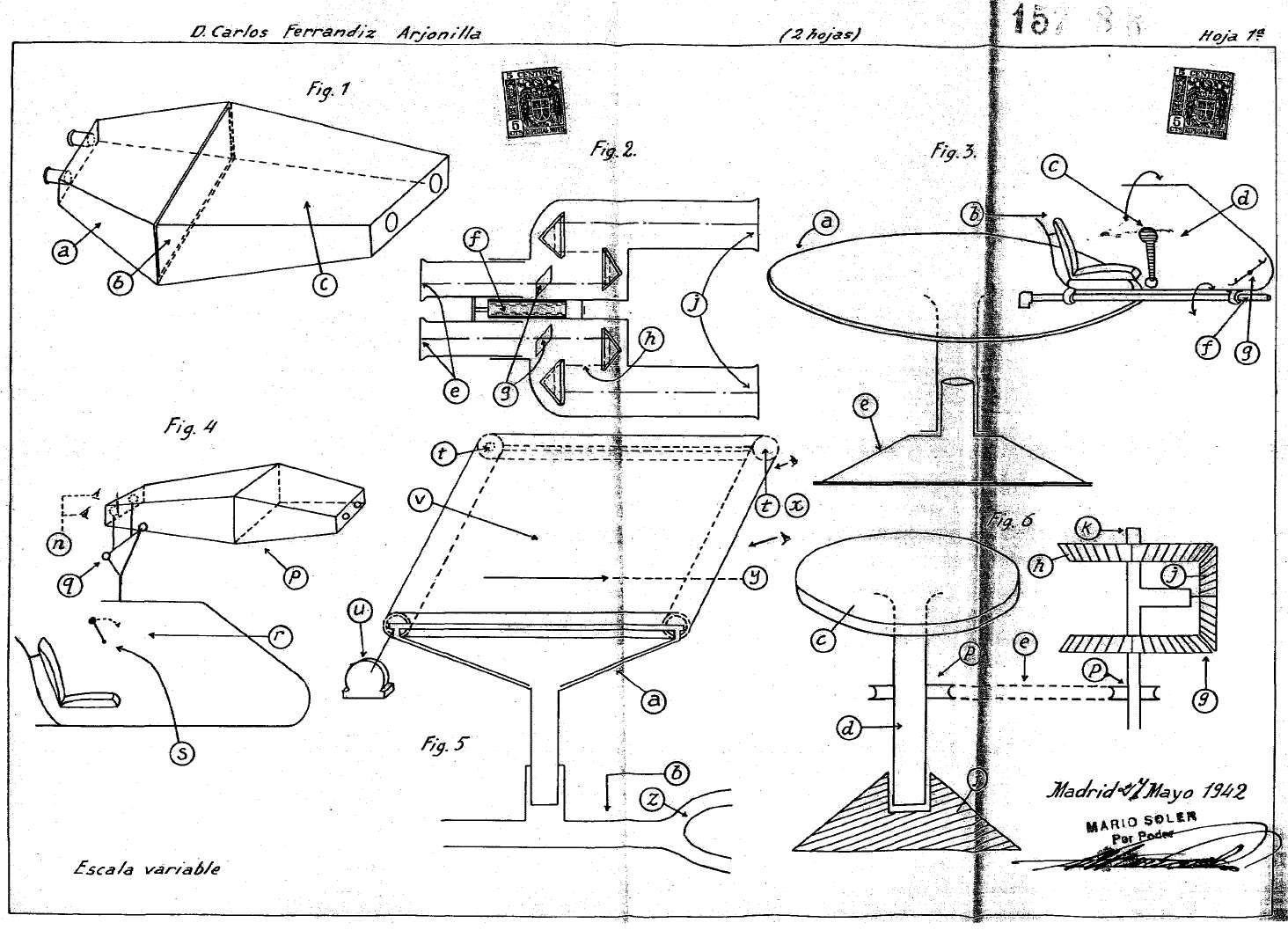
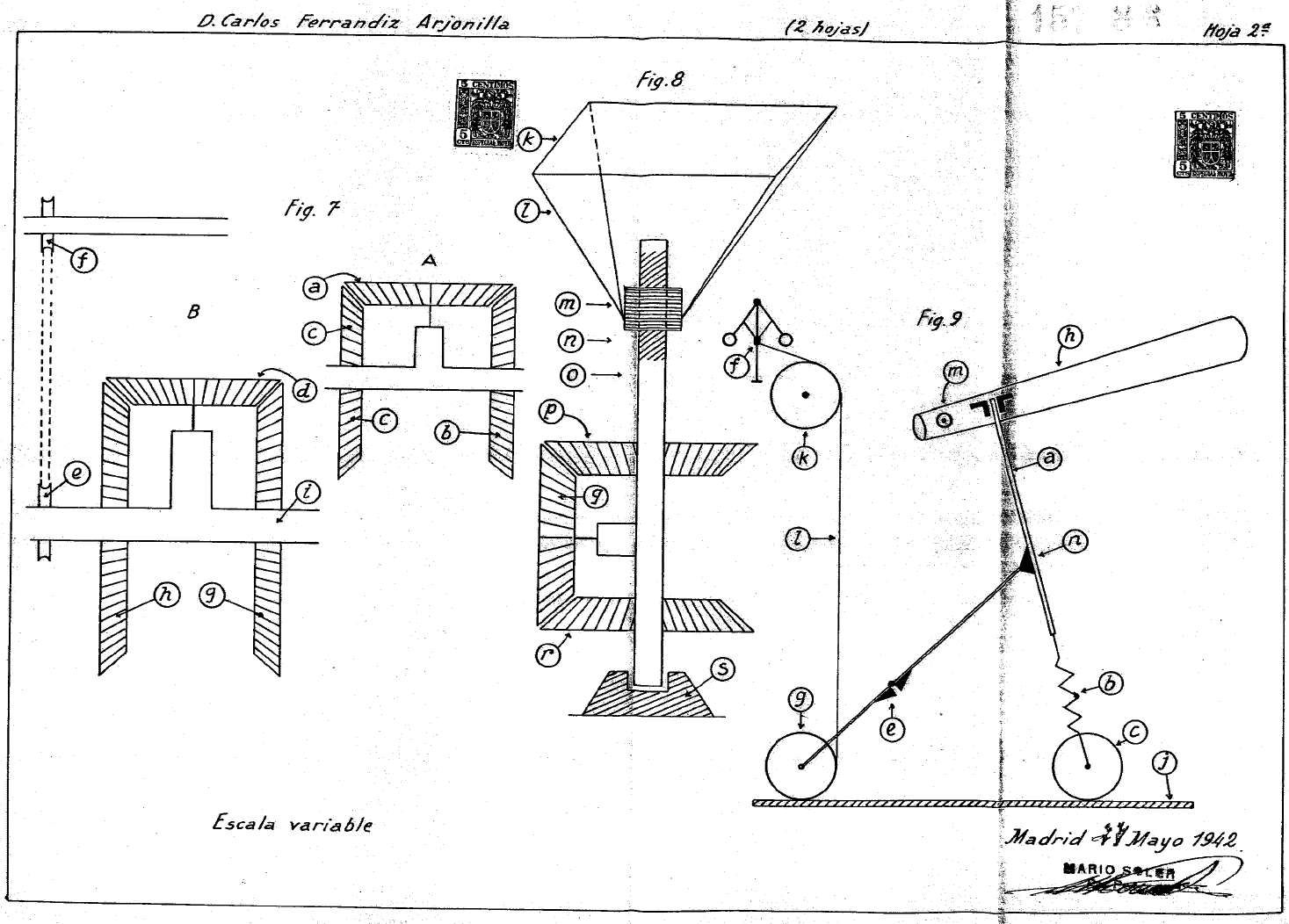
Lo hemos re-descubierto a través del blog de Alejandro Polanco, Tecnología Obsoleta. La solicitud, de mayo de 1942, es de Carlos Ferrándiz Arjonilla, piloto al mando de la Tercera Escuadrilla Azul.
No sabemos si estaría al tanto de los desarrollos realizados en otros países, o si tan solo es fruto del desarrollo concurrente, misma necesidad nacida en distintos lugares que llevan a mismas soluciones o, al menos, similares. Y la necesidad era clara: formar pilotos de forma económica y sin riesgo.
La enseñanza del pilotaje de aviones, tal y como se da actualmente, volando desde el primer día en un avión de escuela, tiene como inconvenientes principales que el alumno ha de realizar sus primeros pasos dentro de un medio, el aire, nuevo totalmente para él, lo que le excita y perturba, y además no resulta económica por cuanto desde el primer día hay consumo de gasolina, desgaste de material, etc. A evitar estos inconvenientes tiende el procedimiento que es objeto de esta patente, dando tranquilidad al alumno, economía en la enseñanza y una difusión ilimitada al deporte de volar.
Carlos Ferrándiz Arjonilla en la introducción de la patente
Por esta fecha se estaba utilizando el Link Trainer profusamente en Estados Unidos. Pero el simulador estaba más orientado al vuelo instrumental. El simulador de Carlos Ferrándiz Arjonilla estaba orientado al vuelo visual, en dos de sus variantes, y al vuelo a ciegas (o instrumental) en la tercera.
El simulador contaba con una o varias barquillas articuladas en tres ejes de libertad, para dotarles de movimiento de cabeceo, alabeo y guiñada. Lo novedoso respecto a otros sistemas de la época, o algo anteriores, que hemos presentado aquí es que ya cuenta con la proyección sintética de un entorno simulado, ¡y además de manera estereoscópica! Además contaría con una plataforma de aterrizaje con un grado de libertad, arriba abajo, y una cinta sin fin, para simular desplazamientos en tierra.
…dotado el alumno de un dispositivo óptico estereoscópico por el que se le hace mirar, se le aparece simultáneamente el avión que se supone que pilota, el terreno imaginario que se mueve, y el cielo y horizonte imaginarios que le sirven de referencia, con la combinación de cuyos elementos se pone al alumno, aunque ilusoriamente, en las mismas condiciones en que se halla al despegar, pilotar y aterrizar con un aparato real.
Carlos Ferrándiz Arjonilla en la patente
Además distinguía tres tipos de distintas instalaciones, por ejemplo al aire libre, donde no hacía falta proyectar un horizonte, pues se disponía del natural, otra en una habitación, diseñada como parte del simulador, y una tercera con una capota cerrada equipada con todos los instrumentos necesarios para volar a ciegas, para practicar el vuelo instrumental, similar entonces al diseño de Ed Link.
Junto con el diseño del sistema estereoscópico para ver el avión propio en 3 dimensiones, contemplaba el diseño de los mecanismos de actuación de las cabinas, para que respondieran a las entradas de los alumnos. Así pues el alumno contaría con los mandos de vuelo clásicos (gases, palanca o volante, pedales, etc), que actuarían enviando señales a los motores eléctricos que debían cambiar la actitud de la cabina, actuando sobre los tres ejes de giro de la misma.
Para complementar la sensación de movimiento de la barquilla articulada, se planteaba que el tapiz en el que se encontraba el horizonte, el cielo y la tierra, pudieran a su vez desplazarse, simulando así los distintos puntos de vista en función de si el avión está en tierra con el patín de cola en el suelo, en carreteo, en ascenso o en descenso.
Otro tapiz móvil en el suelo, tipo cinta sin fin, se encargaría de simular el movimiento del avión en tierra. Además la cabina estaría dotada de unas ruedas y un patín de cola para simular el contacto con la plataforma de aterrizaje.
Esta plataforma de aterrizaje contaría con una cinta sin fin, como hemos descrito anteriormente, y un grado de libertad, desplazamiento vertical. El choque de la plataforma de aterrizaje con las ruedas, más las vibraciones introducidas en el sistema óptico, darían la sensación de haber tomado tierra.
Para despegar las ruedas de la plataforma de aterrizaje habría que alcanzar la velocidad mínima de despegue. ¡Incluso contemplaba la simulación de la entrada en pérdida! Una vez el alumno llegara a la velocidad de pérdida, la cabina y demás dispositivos se moverían de tal modo que darían la sensación de que el avión se encontraba en actitud de descenso, y los mandos dejarían de responder.
No tenemos constancia, sin embargo, de que se realizara ningún prototipo.