
Como última entrada de este año 2022, vamos a traer un invento español. ¡Esperamos que la disfrutéis!
En el blog hemos ido presentando distintos simuladores o protosimuladores de vuelo fabricados en casi todo el mundo. Y, como no, en España también se diseñó al menos uno.
Lo hemos re-descubierto a través del blog de Alejandro Polanco, Tecnología Obsoleta. La solicitud, de mayo de 1942, es de Carlos Ferrándiz Arjonilla, piloto al mando de la Tercera Escuadrilla Azul.
No sabemos si estaría al tanto de los desarrollos realizados en otros países, o si tan solo es fruto del desarrollo concurrente, misma necesidad nacida en distintos lugares que llevan a mismas soluciones o, al menos, similares. Y la necesidad era clara: formar pilotos de forma económica y sin riesgo.
La enseñanza del pilotaje de aviones, tal y como se da actualmente, volando desde el primer día en un avión de escuela, tiene como inconvenientes principales que el alumno ha de realizar sus primeros pasos dentro de un medio, el aire, nuevo totalmente para él, lo que le excita y perturba, y además no resulta económica por cuanto desde el primer día hay consumo de gasolina, desgaste de material, etc. A evitar estos inconvenientes tiende el procedimiento que es objeto de esta patente, dando tranquilidad al alumno, economía en la enseñanza y una difusión ilimitada al deporte de volar.
Carlos Ferrándiz Arjonilla en la introducción de la patente
Por esta fecha se estaba utilizando el Link Trainer profusamente en Estados Unidos. Pero el simulador estaba más orientado al vuelo instrumental. El simulador de Carlos Ferrándiz Arjonilla estaba orientado al vuelo visual, en dos de sus variantes, y al vuelo a ciegas (o instrumental) en la tercera.
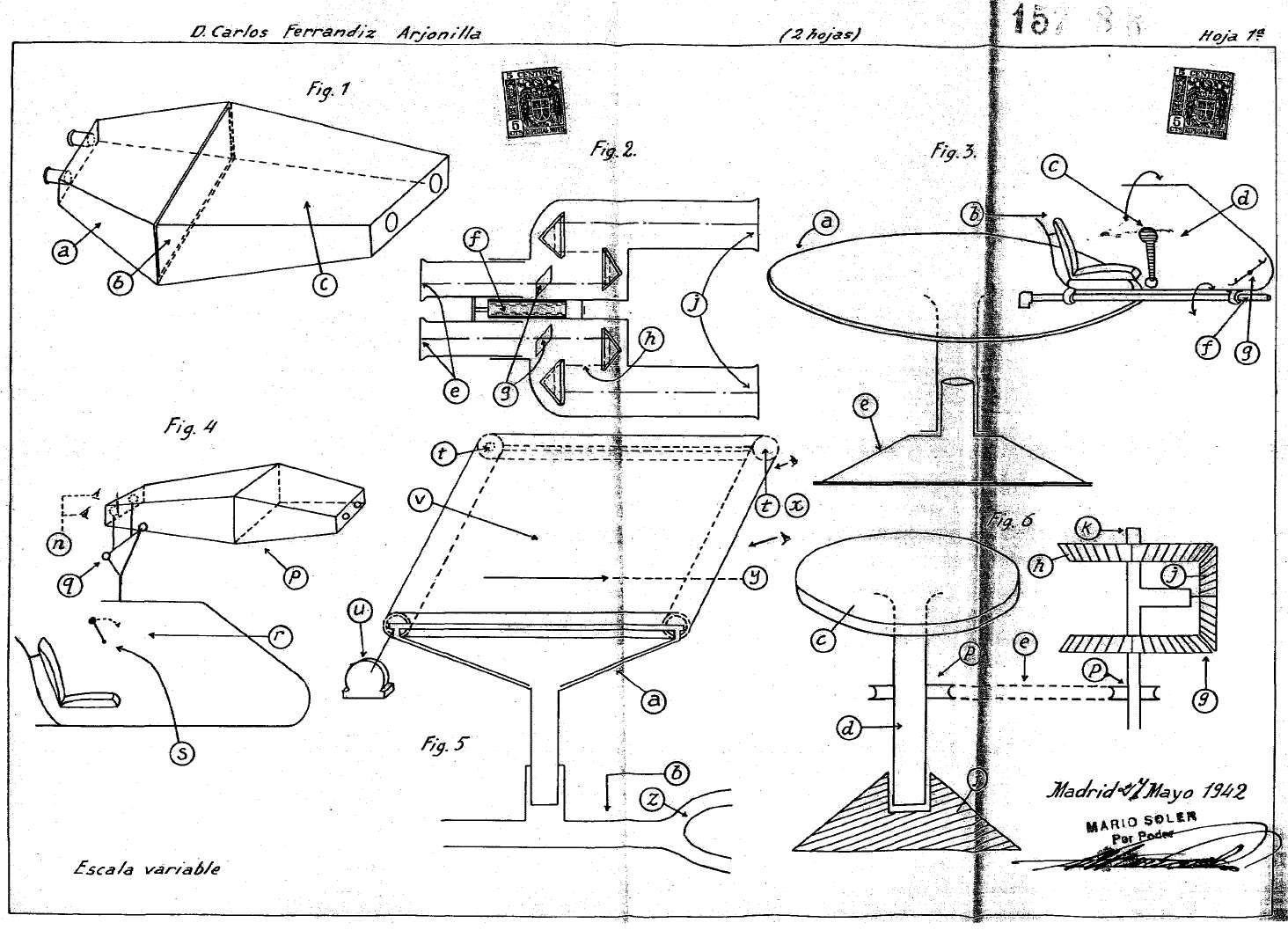
El simulador contaba con una o varias barquillas articuladas en tres ejes de libertad, para dotarles de movimiento de cabeceo, alabeo y guiñada. Lo novedoso respecto a otros sistemas de la época, o algo anteriores, que hemos presentado aquí es que ya cuenta con la proyección sintética de un entorno simulado, ¡y además de manera estereoscópica! Además contaría con una plataforma de aterrizaje con un grado de libertad, arriba abajo, y una cinta sin fin, para simular desplazamientos en tierra.
…dotado el alumno de un dispositivo óptico estereoscópico por el que se le hace mirar, se le aparece simultáneamente el avión que se supone que pilota, el terreno imaginario que se mueve, y el cielo y horizonte imaginarios que le sirven de referencia, con la combinación de cuyos elementos se pone al alumno, aunque ilusoriamente, en las mismas condiciones en que se halla al despegar, pilotar y aterrizar con un aparato real.
Carlos Ferrándiz Arjonilla en la patente
Además distinguía tres tipos de distintas instalaciones, por ejemplo al aire libre, donde no hacía falta proyectar un horizonte, pues se disponía del natural, otra en una habitación, diseñada como parte del simulador, y una tercera con una capota cerrada equipada con todos los instrumentos necesarios para volar a ciegas, para practicar el vuelo instrumental, similar entonces al diseño de Ed Link.
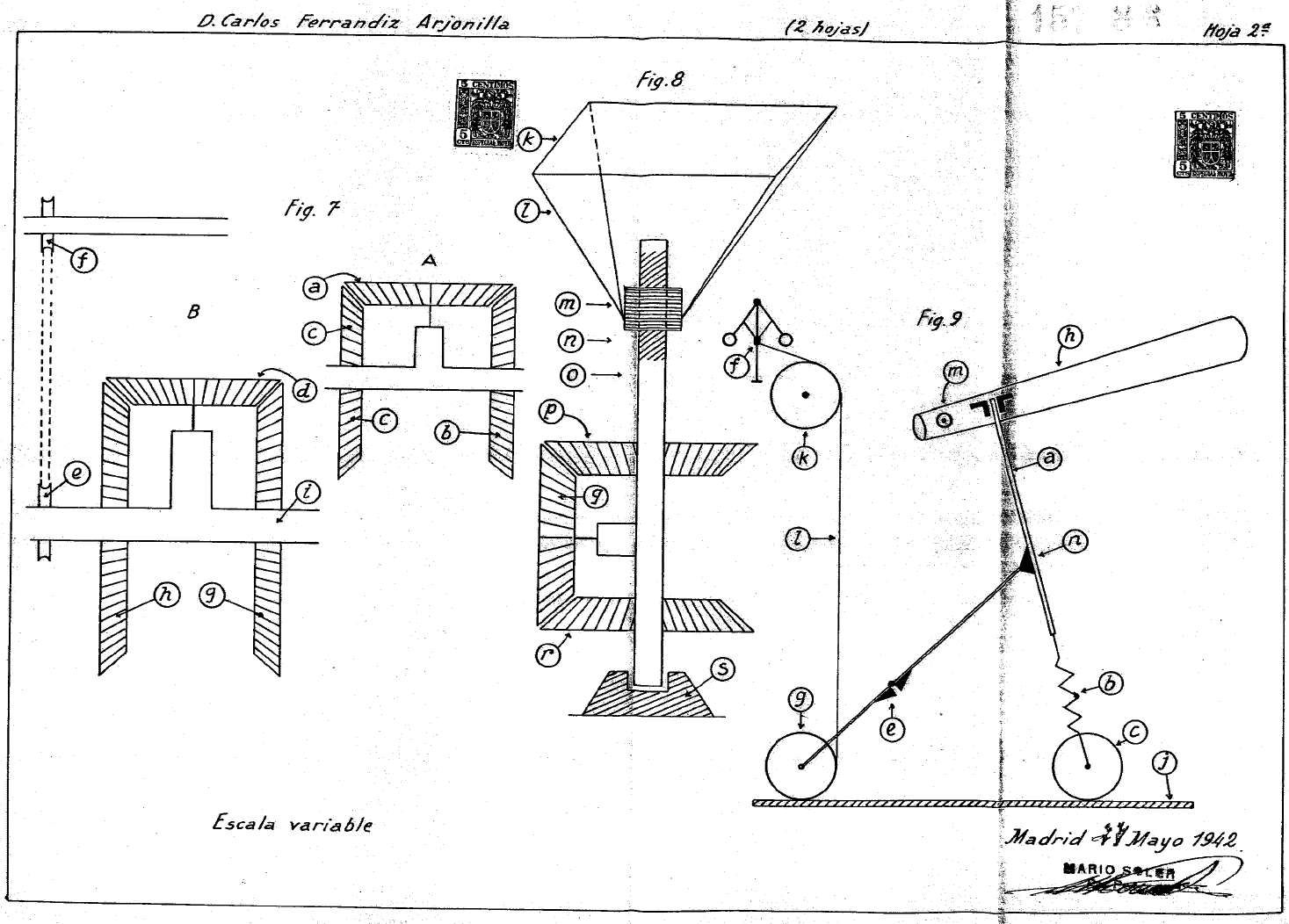
Junto con el diseño del sistema estereoscópico para ver el avión propio en 3 dimensiones, contemplaba el diseño de los mecanismos de actuación de las cabinas, para que respondieran a las entradas de los alumnos. Así pues el alumno contaría con los mandos de vuelo clásicos (gases, palanca o volante, pedales, etc), que actuarían enviando señales a los motores eléctricos que debían cambiar la actitud de la cabina, actuando sobre los tres ejes de giro de la misma.
Para complementar la sensación de movimiento de la barquilla articulada, se planteaba que el tapiz en el que se encontraba el horizonte, el cielo y la tierra, pudieran a su vez desplazarse, simulando así los distintos puntos de vista en función de si el avión está en tierra con el patín de cola en el suelo, en carreteo, en ascenso o en descenso.
Otro tapiz móvil en el suelo, tipo cinta sin fin, se encargaría de simular el movimiento del avión en tierra. Además la cabina estaría dotada de unas ruedas y un patín de cola para simular el contacto con la plataforma de aterrizaje.
Esta plataforma de aterrizaje contaría con una cinta sin fin, como hemos descrito anteriormente, y un grado de libertad, desplazamiento vertical. El choque de la plataforma de aterrizaje con las ruedas, más las vibraciones introducidas en el sistema óptico, darían la sensación de haber tomado tierra.
Para despegar las ruedas de la plataforma de aterrizaje habría que alcanzar la velocidad mínima de despegue. ¡Incluso contemplaba la simulación de la entrada en pérdida! Una vez el alumno llegara a la velocidad de pérdida, la cabina y demás dispositivos se moverían de tal modo que darían la sensación de que el avión se encontraba en actitud de descenso, y los mandos dejarían de responder.
No tenemos constancia, sin embargo, de que se realizara ningún prototipo.
Fuente: la patente
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.