
Últimamente el MALE de Airbus, el SiRTAP, se ha prodigado por prensa. Pero no podemos olvidar el otro MALE español, desarrollado por el INTA, el Milano.

Fue presentado y realizó su primer vuelo público el 22 de septiembre de 2021, aunque su primer vuelo totalmente automático fue en 2019, con lo que imaginamos que en manual voló incluso aún antes. Las primeras maquetas fueron presentadas en París-Le Bourget en 2009.
El MILANO es un sistema aéreo táctico no tripulado de gran autonomía, que opera a altitudes medias, y que ha sido diseñado para realizar misiones de reconocimiento, vigilancia y adquisición de blancos, con un techo operativo de 28000 ft sobre el nivel del mar, una autonomía de hasta 20 horas de vuelo, una masa operativa de 900kg y una carga útil de 150kg.
Concebido para operar en espacio aéreo no segregado, el Milano está diseñado de forma modular, pudiendo albergar hasta 150 kg de carga útil, compuesta por el radar de apertura sintética QUASAR (desarrollado por el INTA), cámaras CCD, FLIR, y equipos de guerra electrónica, aunque la capacidad de la aeronave con respecto al peso y volumen transportables, la potencia eléctrica disponible, así como el avanzado sistema de comunicaciones utilizado, permiten la integración de una amplia gama de cargas de pago electro ópticas y radares de apertura sintética
Con un motor turbo-alimentado de cuatro tiempos, su estación de control enlaza con el avión teniendo una cobertura prácticamente global. Integrada en un contenedor ISO 20, la estación consta de cuatro puestos operativos desde los que se planifica, monitoriza y controla la aeronave y las cargas útiles. El comandante tiene acceso a información meteorológica y a cartografía aeronáutica actualizadas, mediante la creación automática y en tiempo real de mosaicos georreferenciados.
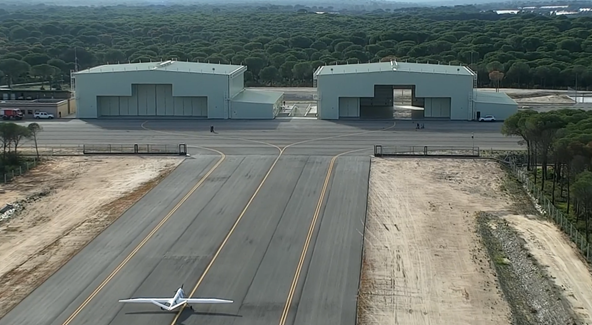
Según la nota de prensa del INTA, a finales del mes de febrero, se efectuó el primer vuelo del sistema aéreo no tripulado Milano en Huelva, en el Centro de Ensayos para Unmanned Systems (CEUS), perteneciente al Instituto Nacional de Técnica Aeroespacial (INTA). En total, se contabilizaron 14 vuelos con este primer prototipo. Esta operación ha permitido validar las optimizaciones implementadas en el avión y en la estación de control, así como reanudar la generación de evidencias de cumplimiento establecidos por la normativa de certificación STANAG-4671 para Unmanned Aerial System (UAS).

El ensayo, realizado por el personal de INTA con apoyo del CEDEA, operó sistemas optrónicos y de radar, y verificó el sistema de telemetría del CEUS.
En los próximos meses, se efectuarán ensayos en vuelo adicionales con el objetivo de validar las redundancias físicas y analíticas implementadas en el sistema y de aumentar progresivamente el techo de vuelo y la velocidad de la aeronave. Además, se permitirá comprobar el radioenlace entre aeronave y avión a medias y largas distancias. Para estos ensayos, se están planificando misiones en las Deltas 120 y 121 definidas sobre el Golfo de Cádiz, en las que también se utilizará el segundo prototipo Milano.
Próximos ensayos: validar redundancias, aumentar techo de vuelo y velocidad, y comprobar radioenlace en misiones sobre el Golfo de Cádiz.
El Milano es un desarrollo que traza sus orígenes en el SIVA y el ALO, y el sistema de control SICANT —Sistema INTA de Control de Aeronaves No Tripuladas—.
Según la web del INTA, la cronología del desarrollo del SICANT y de los UAVs en los que lo podemos encontrar integrado es como sigue:
- Siva
- 1992 Inicio del desarrollo del SIVA 1A
- 1998 Lanzamiento fallido del SIVA 1A en automático
- 2000 Primer vuelo con control manual
- Primer vuelo con SICANT en manual
- ALO
- 2001 Vuelos de estabilización y guiado entre Waypoints con SICANT
- 2003 Primer vuelo del ALO con el SICANT
- Primer lanzamiento del SIVA con control manual
- Primer lanzamiento en automático
- DIANA
- 2004 Inicio del desarrollo del DIANA
- 2007 Primer despegue en automático
- 2008 Primer aterrizaje en automático
- 2010 Primer vuelo completamente en automático
- Primer vuelo nocturno
- Milano
- 2012 Ensayos de taxi automático
- 2013 Control de la cámara en el SICANT
- Vuelo simultáneo de dos vehículos
- 2015 Vuelo coordinado con un vehículo tripulado con control de trafico aéreo
- 2016 Inicio de la adaptación del SICANT para el MILANO
- 2018 Ensayos en tierra del MILANO
- 2019 Primer vuelo del MILANO totalmente en automático
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.