
Aprovechando que Ignacio del Horno está estudiando japonés, le hemos pedido que nos eche una mano con este proyecto… que consiste en la creación de un avión no tripulado nodriza, capaz de desplegar y recuperar vehículos marítimos no tripulados, de forma autónoma. Además, como vimos hablando con Carlos González en nuestros podcast, está la dificultad de la creación de una red que permita al vehículo marítimo operar de forma autónoma en su fase submarina, donde no puede recibir las señales del GPS, y donde no tiene información de la cartografía del fondo marino.
Japón está formado por una gran variedad de islas, y es importante utilizarlas en diversas industrias relacionadas con el océano, proteger sus derechos e intereses y responder a las catástrofes naturales procedentes del océano. Para ello, se difunde de forma eficaz y eficiente la información sobre las vastas zonas económicas exclusivas de Japón (en lo sucesivo, «ZEE») y otras zonas marítimas. Para lograrlo, se necesita tecnología que permita adquirir de forma eficaz y segura información sobre las ZEE.
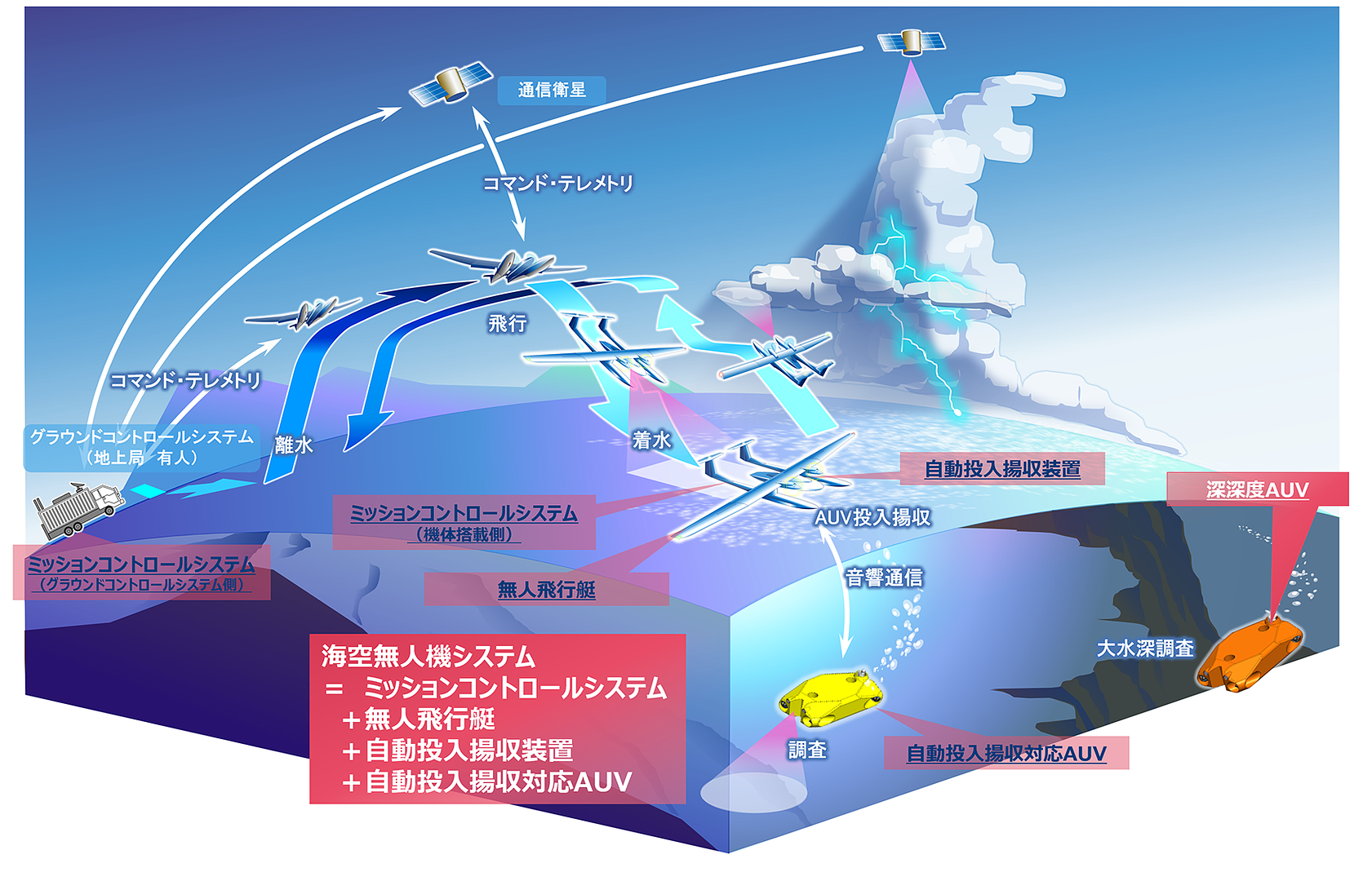
Los métodos convencionales de prospección marina consistentes en transportar, observar, vigilar y recuperar los vehículos marítimos autónomos (AUV) por barco tienen limitaciones de tiempo. Además estos navíos están tripulados, lo que dificulta la realización de prospecciones y observaciones en zonas marítimas peligrosas. Y, aunque el transporte de AUVs por avión y el desarrollo de tecnologías para operaciones no tripuladas se han llevado a cabo en Japón y en el extranjero, la realización de la observación oceanográfica móvil y automatizada como una operación integral aún no se ha logrado.
Por ello, en esta investigación se están desarrollando AUV que combinen la capacidad de estudio del fondo marino con la compacidad y la ligereza. Además de ser capaces de realizar la inserción y la recuperación de formas automáticas desde un UAV.
También se desarrolla un sistema de control de misión que pueda supervisar estos subsistemas de forma integrada y determinar automáticamente si la misión puede continuar o no.
El objetivo es desarrollar un sistema no tripulado de observación y prospección oceanográfica denominado «vehículo no tripulado mar-aire» que combine todo lo anterior, y establecer una tecnología de vehículos no tripulados que permita realizar prospecciones más flexibles, eficientes y seguras en las vastas ZEE de Japón.
Este proyecto forma parte del proyecto de investigación y desarrollo Construcción de un sistema eficiente y maniobrable de observación e investigación oceánica utilizando un vehículo autónomo no tripulado (AUV), dirigido por Ken Takagi, Profesor de la Escuela de Posgrado de Ciencias Fronterizas de la Universidad de Tokio, que forma parte del programa de fomento de tecnologías clave para la seguridad económica promovido por la Agencia Nacional de Desarrollo Científico y Tecnológico, presidida por Kazuhito Hashimoto.
El proyecto ha comenzado en abril de 2024 como proyecto de investigación y desarrollo. El objetivo del proyecto es construir un sistema tripulado y no tripulado que pueda acceder rápidamente a las zonas marítimas objetivo e inspeccionar y vigilar grandes áreas de forma eficiente y segura.
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.