
BLEU: Blind Landing Experimental Unit
La Unidad Experimental de Aterrizaje a ciegas (BLEU) del Royal Aircraft Establishment (RAE) se formó en 1945, inicialmente en RAF Woodbridge pero se trasladó a RAF Martlesham Heath a principios de 1946. Era una unidad multidisciplinar, atrayendo personal de RAE Farnborough y el Establecimiento de Investigación de Telecomunicaciones, Malvern (TRE), encargado del desarrollo de aproximacióna ciegas y aterrizaje autónomo de aeronaves RAF, navales y civiles.
El sistema desarrollado por BLEU utilizó señales de radio como guía, un sistema de aterrizaje por instrumentos (ILS) anterior que definía la línea central de la pista, y un ángulo de aproximación de 3 grados a la pista. La guía en azimut durante la fase final de la aproximación se guiaba con un cable magnético, y se desarrolló un radioaltímetro controlar la y un sistema de gases automático para controlar la velocidad de la aeronave.
Los componentes del sistema se desarrollaron por separado en varios tipos de aviones y en 1950 todo el sistema de aterrizaje automático se había integrado en un avión Devon para realizar las demostraciones finales. En 1953, el desarrollo se extendió a un bombardero Canberra, aunque en ese momento, el aterrizaje automático tenía una prioridad baja para la RAF, y el esfuerzo se concentró en otros proyectos. Esto cambió cuando se emitió un requisito operativo para el aterrizaje automático para los “V-bomber” en 1954.
Tras los ensayos en el Canberra y el Devon, el sistema completo se instaló en un avión más grande, el Varsity. La primera aproximación y aterrizaje completamente automáticos en el Varsity se realizaron el 11 de noviembre de 1954. El desarrollo del sistema completo continuó en Martlesham Heath hasta principios de 1957 cuando BLEU se mudó a Thurleigh ( RAE Bedford).
El desarrollo del Autoland continuó utilizando tres aviones Varsity, y un tercer Canberra que reemplazó a dos perdidos por fallos en el motor. El sistema se mostró a muchas organizaciones e individuos, incluido el duque de Edimburgo en 1959.
Para octubre de 1958, los aviones BLEU habían completado más de 2000 aterrizajes totalmente automáticos.
El proyecto para integrar el Autoland en los bombarderos V desarrolló en paralelo al trabajo en los Varsity y Canberra, con un avión Vulcan, en el que se instaló el sistema durante 1959. El desarrollo y las pruebas de vuelo de Autoland progresaron con éxito, y el Vulcan con este sistema fue aceptado para el servicio militar en 1961 .
El nivel de seguridad requerido para Autoland militar se especificó como una tasa de fallos no superior a 1 entre 120,000 aterrizajes. Un sistema de un canal se juzgó adecuado para cumplir con esta tasa, pero la falta de redundancia hacía que el fallo de un solo componente hiciera que el piloto tuviera que retomaa el control manual y aterrizar visualmente la aeronave, o frustrara la toma con un motor y al aire. Se llevó a cabo un programa intensivo para establecer la capacidad de los pilotos para reconocer y recuperarse con éxito de los fallos del sistema. Además de las pruebas de vuelo en condiciones de niebla simulada, también se utilizó un simulador BLEU desarrollado especialmente para la investigación de aproximación y aterrizaje con baja visibilidad. Se llevó a cabo una investigación considerable sobre las formas de proporcionar al piloto información visual en una pantalla de cabina (Televiewer) y proporcionar información de seguimiento superpuesta en la vista exterior (Head Up Display).
Otro área de investigación se centró en las ayudas visuales necesarias para permitir al piloto controlar la situación de la aeronave durante las etapas finales de una aproximación. Además, se necesitaban suficientes señales visuales en la pista para permitir que el piloto despegara con seguridad con poca visibilidad y para que la aeronave no se saliera de la pista después del aterrizaje. Estas ayudas visuales también resultaron vitales para que el piloto detectara cualquier falla del sistema. El patrón de iluminación desarrollado y probado en vuelo por BLEU, en condiciones de base de nubes cero y visibilidad hacia adelante de 50 pies, finalmente se adoptó como el estándar de la Organización de Aviación Civil Internacional (OACI) para operaciones de baja visibilidad, y ahora está instalado en los principales aeropuertos de todo el mundo.
Las aerolíneas civiles habían seguido de cerca este desarrollo. Las espesas nieblas durante los meses de invierno eran comunes en Europa y empeoraban con el humo cerca de las principales ciudades (por ejemplo, el «smog» de Londres). Los retrasos y desvíos a alternativos causados por estas condiciones aumentaron mucho los costes para las aerolíneas, particularmente para BEA con su base de operaciones en Londres Heathrow.
A fines de la década de 1950 y principios de la de 1960, una mayor cooperación entre BLEU, la UK Air Registration Board, la industria de la aviación y las aerolíneas, llevó a la UK Air Registration Board a definir el requisito de seguridad para Autoland como no más de un accidente fatal en 10 millones de aterrizajes (10 veces más seguro que si los pilotos aterrizaran manualmente).
Para cumplir con un requisito de seguridad tan estricto, el sistema tenía que ser capaz de tolerar los fallos durante el aterrizaje automático. Esto podría lograrse utilizando un sistema triplex, con redundancia triple, como el actual utilizado para captación de datos por parte de Airbus: tres canales independientes, uno de los cuales se desconecta si sus datos no son conformes con los de los otros dos, o un sistema dúplex con un control de fallos.
Se reconoció que el cable magnético de guía no sería práctico para instalar en aeropuertos civiles y se hizo un esfuerzo considerable para mejorar la precisión del ILS durante la década de 1950. A principios de la década de 1960, los diseños nuevos para los transmisores ILS mejoraron hasta tal punto que ya no se requería el cable.
BLEU desempeñó un papel de liderazgo para lograr que el aterrizaje automático y el ILS fueran seguros bajo los estrictos requisitos establecidos para la aviación civil.
En 1961, la Autoridad Federal de Aviación de EE. UU. envió un Douglas DC-7 a RAE Bedford para que se instalara el sistema BLEU y se probara en vuelo. Después de eso, y de más pruebas al regresar a Atlantic City, la FAA apoyó firmemente la solución totalmente automática del Reino Unido, estandarizando así allí también las tomas automáticas en situaciones de mala visibilidad.
La flota de aviones BLEU se actualizó para que fuera más representativa de los aviones civiles. En 1961 se adquirió un DH Comet 3B (XP915) y en 1966 un DH Comet 2E (XV144) equipado con un sistema “tríplex” completo.
En 1963, BLEU recibió el Trofeo Cumberbatch por su destacada contribución a la seguridad aérea.
Se desarrollaron métodos para medir el alcance visual en la pista (RVR) y el alcance visual inclinado (SVR), y se llevaron a cabo pruebas para determinar la supervisión del piloto y las capacidades de toma de control en todas las condiciones de visibilidad. Este trabajo fue un aporte importante a la definición de un conjunto de categorías para operaciones en todas las condiciones meteorológicas, especificando la altura de decisión mínima y el RVR mínimo requerido para cada categoría, adoptado por la OACI en 1965.
En 1972, los aviones Comet fueron reemplazados por un BAC 1-11. El último de los aviones Varsity (WF417), que había sido el «caballo de batalla» para la mayoría de las pruebas de BLEU, fue reemplazado por un HS 748 XW750.
La introducción de Autoland en la flota de Trident de BEA requirió un gran esfuerzo por parte de BEA, Hawker Siddeley Aviation, Smiths Industries y BLEU. La certificación pasó de la Categoría I en 1965, a la Categoría II, III(a), III(b) y finalmente a la Categoría III(c) en 1979. Durante este tiempo se analizaron unos 40.000 aterrizajes automáticos.
Smiths y BLEU también desarrollaron un sistema de aterrizaje autónomo para el carguero Belfast de la RAF.
BLEU fue líder mundial en el desarrollo del aterrizaje automático, y los sistemas
actuales son esencialmente los mismos que desarrolló BLEU.
En 1974, BLEU pasó a llamarse División de Sistemas Operativos, parte del Departamento de Sistemas de Vuelo.
Fases del Autoland 1958
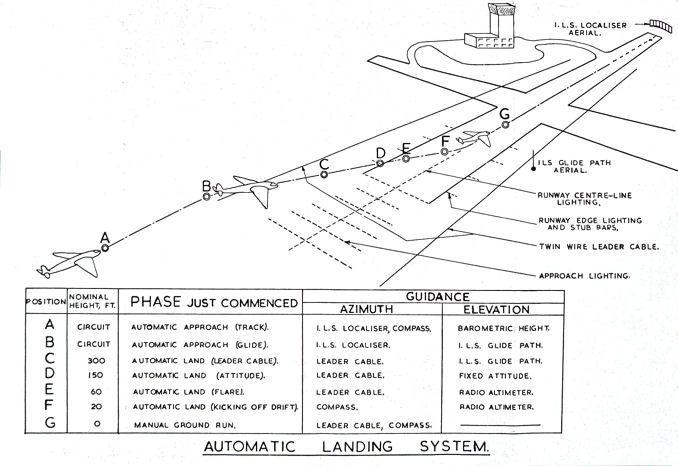
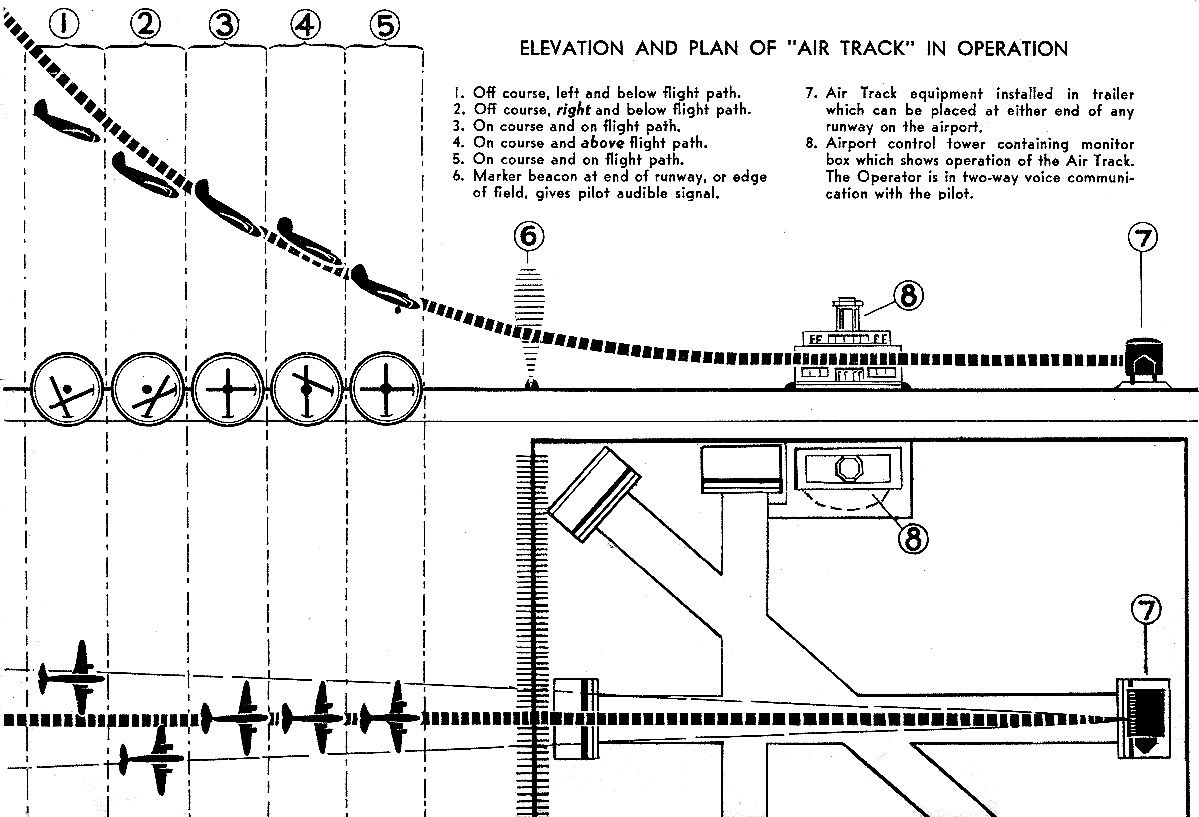
El avión se aproxima (A-B) al aeródromo con el piloto automático utilizando el altímetro barométrico para mantener una altitud constante de la aeronave (por ejemplo, 1500 pies), y utilizando la señal del localizador ILS para encontrar y luego mantener la línea central de la pista. El acelerador automático controla con precisión la velocidad de aproximación al valor seleccionado por el piloto. Cuando se intercepta el haz de la trayectoria de planeo del ILS (en B), se inicia el descenso (fase GLIDE) con el control de altura barométrica desconectado y controlando la aeronave para que siga el haz de la trayectoria de planeo del ILS (normalmente definiendo una trayectoria de descenso de 3 grados hacia el haz de planeo). La señal del localizador ILS todavía se usa para guía lateral y no abandonar el eje de la pista..
A una altura aproximada de 300 pies, la aeronave entra en la cobertura de la señal del cable guía (en C) y el piloto automático cambia automáticamente del localizador ILS al cable guía (fase LEADER CABLE). En elevación, la aeronave continúa siendo controlada a la trayectoria de planeo ILS.
A una altura de aproximadamente 100 pies (D), la señal de la trayectoria de planeo del ILS se desconecta y la aeronave se controla a un datum de cabeceo medio calculado automáticamente mientras vuela por la trayectoria de planeo (fase de ATTITUDE). Esto continúa durante unos segundos hasta una altura de unos 60 pies (E), cuando el control vertical se transfiere al radioaltímetro (fase FLARE), y la velocidad de descenso se reduce gradualmente para lograr un aterrizaje suave. Los aceleradores van cortando gases automáticamente a una velocidad constante hasta la velocidad de ralentí de vuelo segura del motor.
Aproximadamente a 20 pies (F), se desconecta la señal del cable líder, se nivelan las alas y se aplica el timón para eliminar automáticamente cualquier deriva debido a un viento cruzado (fase KICK OFF DRIFT). Después del contacto con el suelo, el piloto desactiva el piloto automático y dirige la aeronave a lo largo de la pista (G-H), utilizando información visual o un vector de dirección dado por una combinación de la señal del cable guía y el rumbo de la brújula. El piloto también aplica el frenado manual para llevar la aeronave a una velocidad de rodaje segura.
Fuentes
Comparte esto:
Descubre más desde Sandglass Patrol
Suscríbete y recibe las últimas entradas en tu correo electrónico.