La división Skunk Works de Lockheed Martin ha dejado ver un diseño conceptual de aeronave furtiva para repostaje en vuelo en Aviation Week, según hemos descubierto gracias a The Aviationist.
El KC-135 empieza a no dar más de sí y necesita una jubilación. El KC-46 ha demostrado ser tan problemático como los últimos diseños civiles de Boeing. Y, para desgracia de la USAF, los MRTT de Airbus fueron rechazados. Así que ahora mismo los estadounidenses se encuentran por un lado buscando un reemplazo interino para los dos modelos de cisterna ya citados, y por otro lado para un modelo de cisterna del futuro.
Hasta ahora hemos hablado de una propuesta de Boeing, también furtiva y bideriva, y un desarollo de Jet Zero, tipo blended wing body, que podría ser avión de pasajeros, avión de carga civil y militar, o avión cisterna.
En principio el diseño de Lockheed Martin parece tener dos motores, por sendas tomas bajo el ala, con un ala con forma de lambda, y aparentemente dos cockpits, uno delantero y otro por detrás, por las ventanas que muestra.
No obstante, no deja de ser un diseño conceptual, una imagen artística de lo que podría ser, y es totalmente distinta de otras imágenes que ha mostrado Lockheed Martin como futuro avión cisterna. Por ello, tal vez lo más interesante no sea la forma en sí de esta imagen, sino comprobar que los diseños furtivos ya no sólo se aplican a pequeños cazas y bombarderos, y que está ganando importancia en todo tipo de aeronaves, como aviones cisterna.
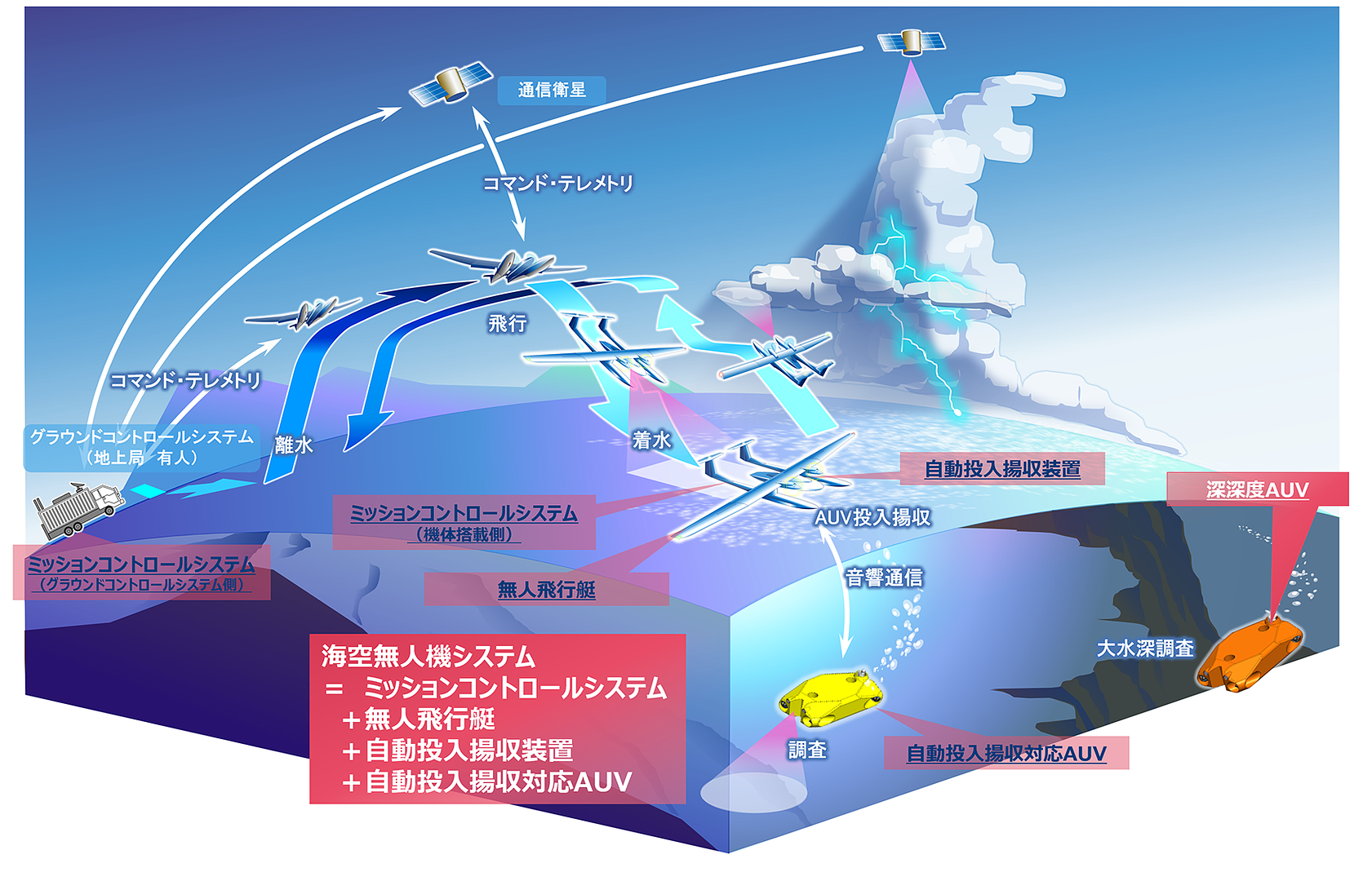
Aprovechando que Ignacio del Horno está estudiando japonés, le hemos pedido que nos eche una mano con este proyecto… que consiste en la creación de un avión no tripulado nodriza, capaz de desplegar y recuperar vehículos marítimos no tripulados, de forma autónoma. Además, como vimos hablando con Carlos González en nuestros podcast, está la dificultad de la creación de una red que permita al vehículo marítimo operar de forma autónoma en su fase submarina, donde no puede recibir las señales del GPS, y donde no tiene información de la cartografía del fondo marino.
Japón está formado por una gran variedad de islas, y es importante utilizarlas en diversas industrias relacionadas con el océano, proteger sus derechos e intereses y responder a las catástrofes naturales procedentes del océano. Para ello, se difunde de forma eficaz y eficiente la información sobre las vastas zonas económicas exclusivas de Japón (en lo sucesivo, «ZEE») y otras zonas marítimas. Para lograrlo, se necesita tecnología que permita adquirir de forma eficaz y segura información sobre las ZEE.
Los métodos convencionales de prospección marina consistentes en transportar, observar, vigilar y recuperar los vehículos marítimos autónomos (AUV) por barco tienen limitaciones de tiempo. Además estos navíos están tripulados, lo que dificulta la realización de prospecciones y observaciones en zonas marítimas peligrosas. Y, aunque el transporte de AUVs por avión y el desarrollo de tecnologías para operaciones no tripuladas se han llevado a cabo en Japón y en el extranjero, la realización de la observación oceanográfica móvil y automatizada como una operación integral aún no se ha logrado.
Por ello, en esta investigación se están desarrollando AUV que combinen la capacidad de estudio del fondo marino con la compacidad y la ligereza. Además de ser capaces de realizar la inserción y la recuperación de formas automáticas desde un UAV.
También se desarrolla un sistema de control de misión que pueda supervisar estos subsistemas de forma integrada y determinar automáticamente si la misión puede continuar o no.
El objetivo es desarrollar un sistema no tripulado de observación y prospección oceanográfica denominado «vehículo no tripulado mar-aire» que combine todo lo anterior, y establecer una tecnología de vehículos no tripulados que permita realizar prospecciones más flexibles, eficientes y seguras en las vastas ZEE de Japón.
Este proyecto forma parte del proyecto de investigación y desarrollo Construcción de un sistema eficiente y maniobrable de observación e investigación oceánica utilizando un vehículo autónomo no tripulado (AUV), dirigido por Ken Takagi, Profesor de la Escuela de Posgrado de Ciencias Fronterizas de la Universidad de Tokio, que forma parte del programa de fomento de tecnologías clave para la seguridad económica promovido por la Agencia Nacional de Desarrollo Científico y Tecnológico, presidida por Kazuhito Hashimoto.
El proyecto ha comenzado en abril de 2024 como proyecto de investigación y desarrollo. El objetivo del proyecto es construir un sistema tripulado y no tripulado que pueda acceder rápidamente a las zonas marítimas objetivo e inspeccionar y vigilar grandes áreas de forma eficiente y segura.
Cuando se empezó a hablar de aviones no tripulados siempre se mencionaba que eran especialmente útiles para misiones que cumplieran las 4Ds de la automatización:
Dirty – Sucias, con riesgos biológicos, nucleares, sanitarios…
Dull – Repetitivas y tediosas, como misiones de prospección o vigilancia
Dangerous – Peligrosas, en entornos disputados donde la vida humana corre peligro
Difficult – Difíciles, misiones que pueden resultar difíciles de ejecutar de manera manual
Y basado en esas cuatro misiones llegó el boom de los UAV o drones. Una explosión en la que se presentaban todo tipo de aeronaves que prometían solucionar casi cualquier misión, civil o militar. Sin embargo muchos no eran viables, y para otros fue demasiado pronto: faltaban capacidades autónomas que permitieran actuar en esas zonas D4 lejos del operador humano. Y teniendo que tener al humano siempre en el bucle para tomar cualquier decisión, como esquivar un obstáculo, era difícil su implementación a gran escala.
Hoy en día se han solucionado muchas de las limitaciones que veíamos hace 20 años, gracias al desarrollo de la inteligencia artificial, de robots que aprenden solo, de la visión artificial… y viviremos un segund boom de dronificación, desde los tan mencionados en este blog puntos fieles a los aviones no tripulados de carga. Como este.
La asociación presenta RUMRUNNER, una edición modificada del Pelican Cargo de Pyka para logística en entornos disputados.
OAKLAND, California (6 de mayo de 2024) — Pyka y SNC se han asociado para ofrecer el sistema aéreo no tripulado de carga eléctrico a gran escala de Pyka a clientes dentro del Departamento de Defensa de los Estados Unidos. La dinámica asociación combina la experiencia de SNC en la personalización de soluciones para los desafíos más complejos del mundo y la revolucionaria aeronave de carga eléctrica autónoma de Pyka, Pelican Cargo.
Juntos, Pyka y SNC han presentado RUMRUNNER, una edición modificada del Pelican Cargo, el mayor UAS de carga eléctrico del mundo al 100% para el sostenimiento en operaciones disputadas. Con capacidad de despegue y aterrizaje supercorto de alta potencia (SSTOL), una capacidad de carga de hasta 400 libras (181.6kg) y un alcance de hasta 200 millas (322km), RUMRUNNER es un cambio de paradigma para las operaciones de avituallamiento militar, permitiendo una logística dinámica y un soporte energético operativo desde los puntos de distribución hasta los puntos de necesidad.
«El Pelican Cargo de Pyka es diferente a cualquier otra solución de UAS en el mercado para logística en entornos disputados», dijo Michael Bertman, vicepresidente de programas en SNC. «Evaluamos diversas capacidades líderes y concluimos que el Pelican Cargo es significativamente más capaz que cualquier otra plataforma. Es la única aeronave de carga eléctrica para entornos austeros con ese tipo de alcance, capacidad de carga y volumen de carga. Si bien el aspecto de energía limpia es importante, se espera que la creación de una cadena de suministro más diversa, distribuida y resistente sea el principal impulsor en términos de interés por parte del Departamento de Defensa. El componente Zero-Fuel minimiza la necesidad de adelantar combustible a granel, lo que reduce significativamente la logística normalmente asociada con las operaciones de reabastecimiento. Esto presenta oportunidades para aumentar la supervivencia de nuestros miembros del servicio, reducir los riesgos para la fuerza y transformar la forma en que se han llevado a cabo históricamente las operaciones militares».
«Estamos emocionados de asociarnos con SNC para llevar nuestra plataforma autónoma de carga eléctrica UAS a los clientes del DoD», dijo Michael Norcia, cofundador y director ejecutivo de Pyka. «SNC tiene una amplia experiencia en la modificación de productos del ecosistema tecnológico del Valle del Silicio para adaptarse a los requisitos del DoD, y están comprometidos en poner tecnología de vanguardia como Pelican Cargo a disposición del gobierno de los Estados Unidos».
El uso de paracaídas como medio de infiltración silencioso es casi tan viejo como el propio paracaídas. Y su desarrollo con campana cuadrada, dirigibles, lo perfeccionó.
Durante la demostración utilizaron tanto paramotores «simples», con una persona y el motor en su espalda, como paramotores con carrito.
Los paramotores pueden volar MUY bajo, son muy silenciosos, y permiten operaciones muy discretas. Y parece ser que en la demostración de Tampa inclso se vieron involucrados en la interceptación de una formación de drones.
La apuesta de Boeing y de la US Navy para el repostaje en vuelo de las aeronaves embarcadas es el MQ-25 Stingray, un avión cisterna no tripulado que, hasta ahora, era controlado por pilotos de UAV desde el portaaviones. Esto dificultaba los repostajes a larga distancia del buque, por el retraso en la llegada de los comandos. Por eso Boeing ha desarrollado y validado este software, que permite al piloto del avión repostado tomar los controles del Stingray e iniciar la secuencia de repostaje por sí mismo, sin depender del piloto de UAV en el barco.
La validación la ha realizado en un vuelo simulado, integrando el software de control dentro del simulador, en el que un piloto humano volaba el F/A-18 mientras que controlaba el MQ-25.
Boeing ha avanzado en su tecnología de trabajo en equipo de aeronaves tripuladas-no tripuladas (MUM-T) utilizando un F/A-18 Super Hornet digital y un MQ-25 Stingray. Las pruebas muestran que el software está maduro para su uso futuro en la Marina de los EE. UU. y tiene potencial para implementar la capacidad MUM-T en los Super Hornets F/A-18 Block II y III.
En un laboratorio de simulación, un equipo liderado por Boeing demostró virtualmente a un piloto de F/A-18 al mando de un MQ-25 no tripulado para liberar un embudo de reabastecimiento de combustible y reabastecer de combustible al Super Hornet, utilizando enlaces de comunicaciones existentes en ambas plataformas.
El nuevo software es el resultado de los ensayos que Boeing ha realizado anteriormente. Además del software actualizado, los equipos de prueba utilizaron hardware y enlaces de datos ya instalados en ambas plataformas para ejecutar el software finalizado, lo que demuestra aún más la preparación de Boeing para ofrecer esta capacidad a la Armada.
“El MQ-25 está diseñado para recibir normalmente órdenes de pilotos de vehículos aéreos en un portaaviones. Este software agregará una segunda opción, que permitirá a los pilotos iniciar comandos directamente desde su cabina”, dijo Alex Ewing, líder de desarrollo de nuevos productos F/A-18.
El software creado por Boeing reducirá significativamente el tiempo que tarda un F/A-18 en comunicarse con un MQ-25, dando a los pilotos una mayor flexibilidad para repostar combustible desde distancias más largas.
«El objetivo de las demostraciones era hacer que el reabastecimiento de combustible del MUM-T fuera lo más real posible», dijo Juan Cajigas, director del programa Advanced MQ-25. “El reabastecimiento de combustible en vuelo es como un ballet cuando dos aviones se juntan. Poder dirigir las actividades a través de un único piloto, de forma segura y eficiente, es un gran paso adelante en la tecnología de reabastecimiento aéreo”.