En este blog somos muy críticos con la llamada movilidad aérea urbana o nueva movilidad aérea, para no dejar fuera los viajes interurbanos. Y menos con sus diseños de aeronaves eléctricas de despegue y aterrizaje vertical. Tan sólo hemos encontrado cierto sentido a los autogiros, y a las aeronaves convencionales STOL. Ésta, de Electra, entra dentro de esta última categoría.
Si recordáis de cuando os explicamos cómo funciona un ala y los dispositivos hipersustentadores, la sustentación depende del torbellino que se genera entorno al perfil alar.
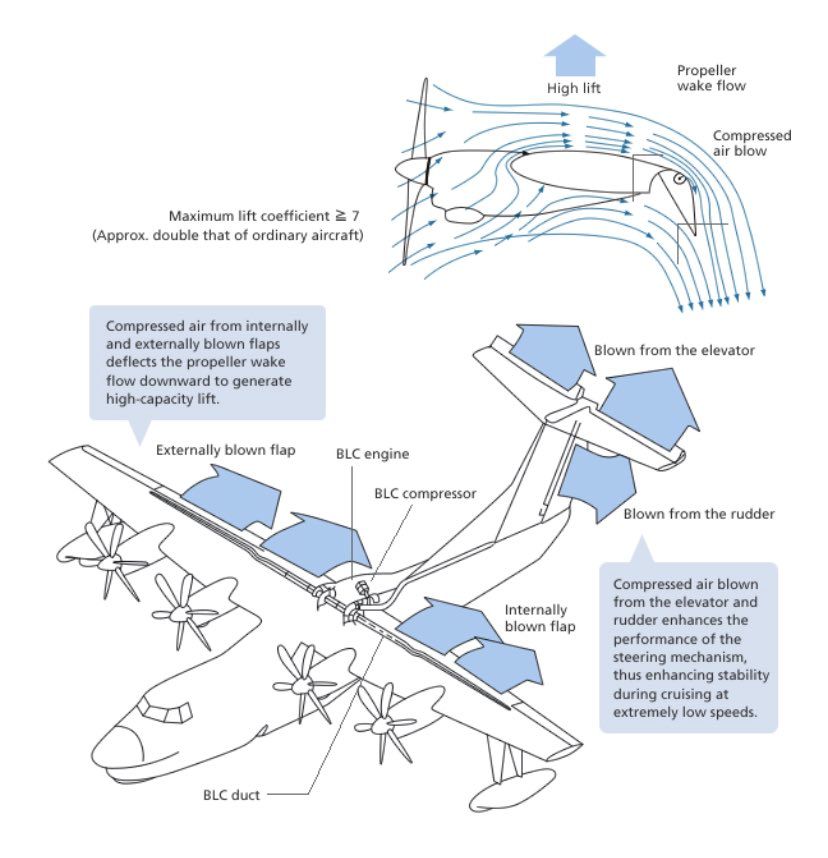
Con la propulsión distribuida, muchas hélices situadas a lo largo del borde de ataque, se consiguen varios efectos. Por un lado, se sopla la capa límite, retrasando su desprendimiento y permitiendo así un mayor ángulo de ataque, y por tanto sustentación. Pero, además, energiza el torbellino, dando más velocidad al aire del extradós, acortando así la carrera de despegue.
Soluciones similares las hemos visto con el diseño de slat soplado de Cubcrafters, el Shin Maywa US2 o el An-2 híbrido-eléctrico con 9 motores. Y es el mismo efecto que se buscaba con la Turbo Wing.
De este modo, una aeronave convencional como ésta puede despegar en distancias tan cortas como 52m, y aterrizar en 35, según la nota de prensa de Electra Aero.
Los inconvenientes de los eVTOL los hemos tratado muchas veces, como su certificación, rentabilidad, el ciclo de uso de las baterías, y otros análisis que hemos hecho.
Pero una aeronave STOL es ligeramente distinta. Por lo comentado de las baterías, seguimos viendo difícil una aplicación eléctrica, pero a la hora de certificar seguramente sea más sencillo que cualquier otro concepto extraño de los que han aparecido en el mundo eVTOL. El diseño es convencional, y no hay que convencer a las autoridades de que es seguro, ¡ya se sabe que lo es y hay amplia experiencia certificando aeronaves de ala fija! También es más sencillo hacer un diseño seguro, controlable y redundante al fallo en caso de pérdida de uno o más motores que en el caso de los diseños «multicópteros», incluso aunque no tuviera potencia suficiente para mantener la altitud de vuelo y se viera obligado a aterrizar. Al depender de su ala fija para lograr la sustentación, es un diseño menos sediento de energía que los eVTOL, y por tanto con mayor autonomía a igualdad de energía transportada, sea en forma de batería od e combustible. Así que, al menos técnicamente, parece un concepto más viable que otros extraños eVTOL, habrá que ver si también lo es económicamente. Y, al menos, el avión de Electra no es eléctrico puro, sino híbrido.
Nota de prensa de Electra Aero
Electra anunció el 29 de mayo de 2024 que ha logrado con éxito las primeras operaciones de despegue y aterrizaje ultra cortos de alto rendimiento de su avión demostrador híbrido-eléctrico (eSTOL) EL-2 Goldfinch con sustentación aumentada por soplado del ala.
«El hito de hoy es un logro increíble, ya que hemos demostrado que nuestro avión eSTOL tiene la capacidad de hacer lo que dijimos que podía hacer: operar desde espacios más cortos de 300 pies —91m—», dijo JP Stewart, Vicepresidente y Gerente General de Electra. «El manejo de la aeronave a bajas velocidades ha sido excepcional y se está ajustando bien a nuestro análisis, lo que aumenta la confianza en la capacidad prevista del diseño del producto de 9 pasajeros. Continuaremos desarrollando nuestras tecnologías, incluido el sistema de control de vuelo ‘thrust-by-wire’, para permitirnos volar aún más lento en el enfoque y mejorar aún más el rendimiento de despegue y aterrizaje STOL en la campaña de pruebas en curso».
Los vuelos de prueba, pilotados por Cody Allee, se llevaron a cabo en abril y mayo de 2024 en el Aeropuerto Regional de Manassas y el Aeropuerto de Warrenton-Fauquier en Virginia. El vuelo más largo duró 1 hora y 43 minutos. Durante la campaña, la aeronave despegó en menos de 170 pies —52m— y aterrizó en menos de 114 —35m—, la aeronave alcanzó una altitud de 6,500 pies y voló tan lentamente como 25 nudos —46km/h— en despegue y aterrizaje. Los datos y conocimientos obtenidos del programa de pruebas de vuelo informarán el diseño del avión eSTOL comercial de 9 pasajeros de Electra, con la entrada en servicio comercial bajo las regulaciones de la Parte 23 de la FAA prevista para 2028.
El diseño de ala soplada de Electra utiliza ocho motores eléctricos para aumentar significativamente la sustentación del ala, lo que permite que la aeronave eSTOL despegue y aterrice en solo 1/10 de espacio necesario por aeronaves convencionales. Esto permite el acceso a lugares a los que actualmente solo pueden llegar los helicópteros. Los motores eléctricos silenciosos reducen drásticamente el ruido y las emisiones para operaciones amigables con la comunidad. La energía híbrido-eléctrica proporciona capacidad de largo alcance sin la necesidad de estaciones de carga terrestres.